







单纯的去看自控原理,很多概念有点抽象,最好找些应用去理解相关的概念,就找了实验室的一个平衡小车作为应用,不过主要根据小车去跑matlab去验证一些控制算法。结合台湾国立交通大学林沛群的自控线上课的总结
一、自控原理重要概念
问题:什么是自控,到底自控要干的是什么事情?
自控就是希望被控对象的表现达到预期,那自然控制器怎么去控制(给控制量)就是核心了。
(一)两种控制模式:
1.开环控制模式
根据预先设定的控制量计算方法给出控制量,这个计算方法无视被控对象的表现,只看自己,不看对象。
开环控制的控制量计算,有个前馈控制概念 : 根据扰动或设定值的变化按补偿原理而工作的控制系统。其特点是:当扰动作用产生,被控变量还未变化以前,根据扰动作用的大小进行控制。以补偿扰动对被控变量的影响。
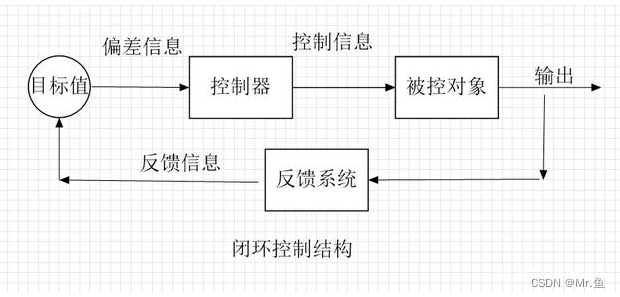
2.闭环控制模式
看菜吃饭,控制量的计算要实时的根据被控对象的表现(相关传感数据)进行计算调整。从被控对象的表现进行反馈到被控量的技术也就算反馈控制。
(二)自控系统的分类
●按控制方式:按给定值操纵的开环控制、按干扰补偿的开环控制、按偏差调节的闭环控制、复合控制:闭环反馈为主,开环补偿为辅。
●按给定值变化规律:恒值系统、随动系统、程序控制系统。
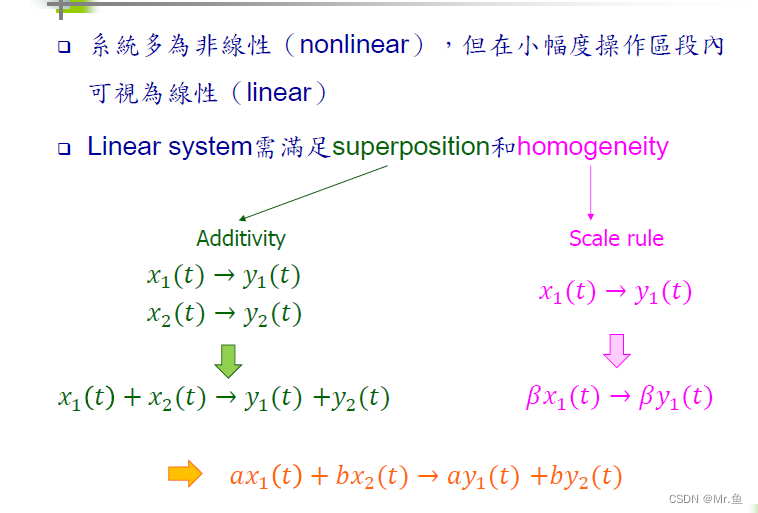
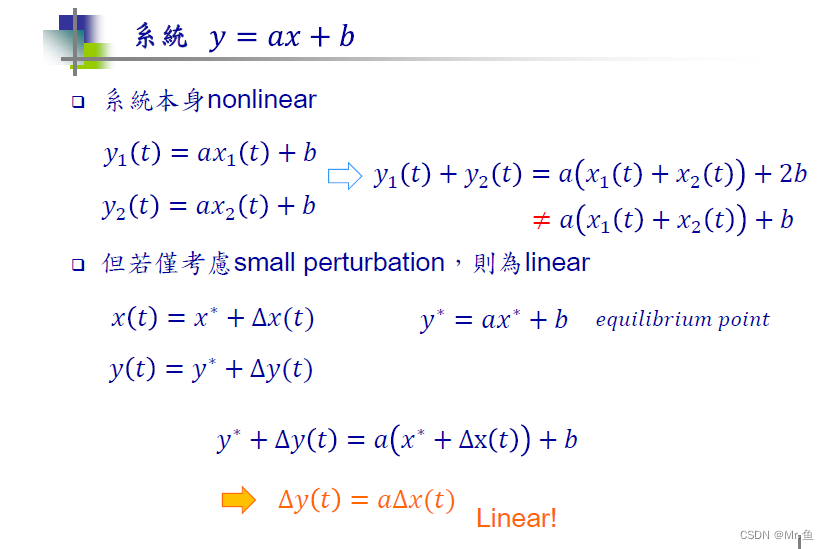
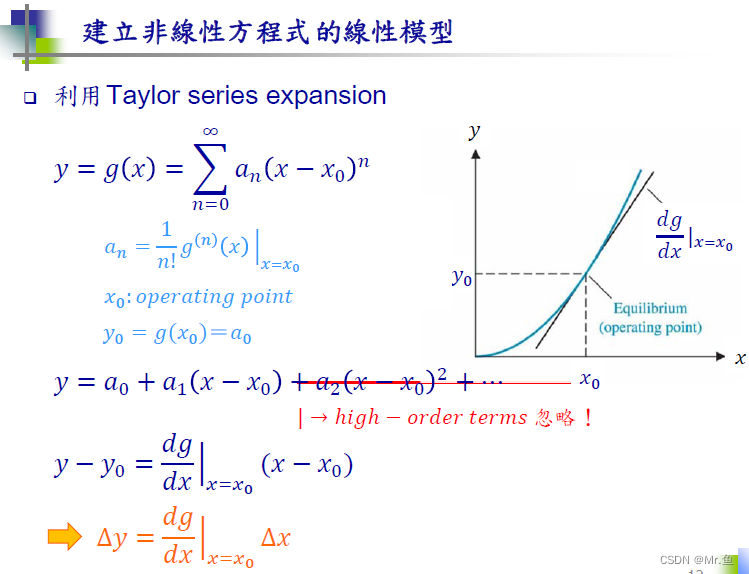
●按系统性能:线性/非线性系统、连续/离散性系统、定常/时变性系统、确定/不确定系统。
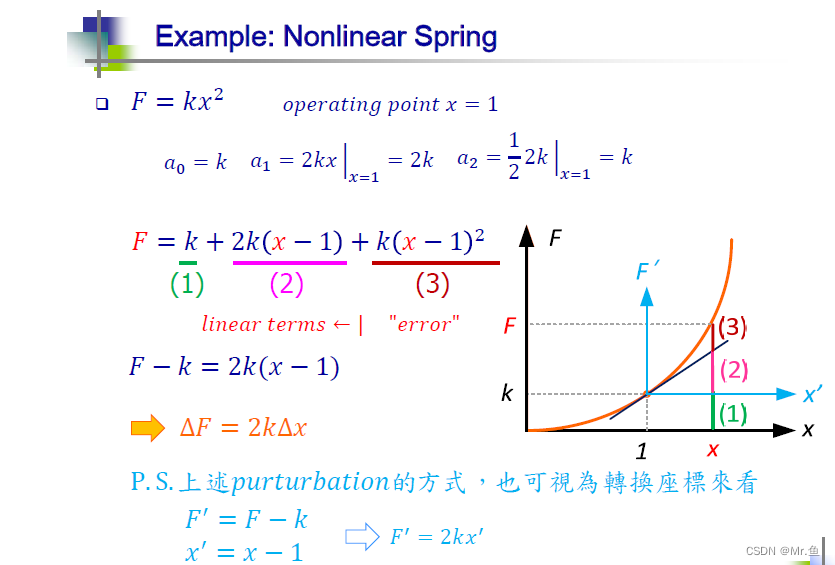
一般接触的主要是线性非时变系统,现实中很多是把非线性系统转化成线性系统去处理,比如带有sin(a)在a接近0附近直接等价转换成a。
(三)自动系统衡量好坏的要素
基本要求:
稳定性:是保证控制系统正常工作的先决条件。
快速性:动态性能,有指标。
准确性:稳态(过度结束后的)值应尽量与期望值一致。
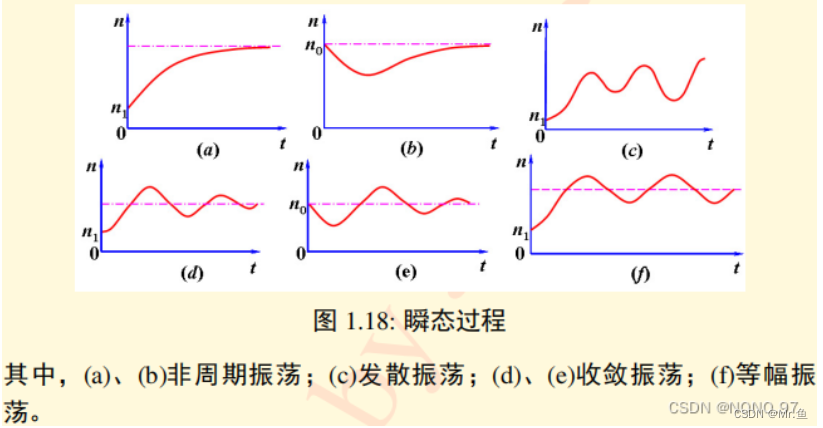
最基本的就是稳定性,如下图虚线是控制目标,有几种常见的控制结果
具体的指标参数
1.稳态值
2.上升时间
3.调节时间:
4.最大超调量
5.峰值时间
6.延迟时间

(四)怎么去计算这个控制量呢?
1.系统建模(有些算法不需要建模,如PID)
五中系统表达方式
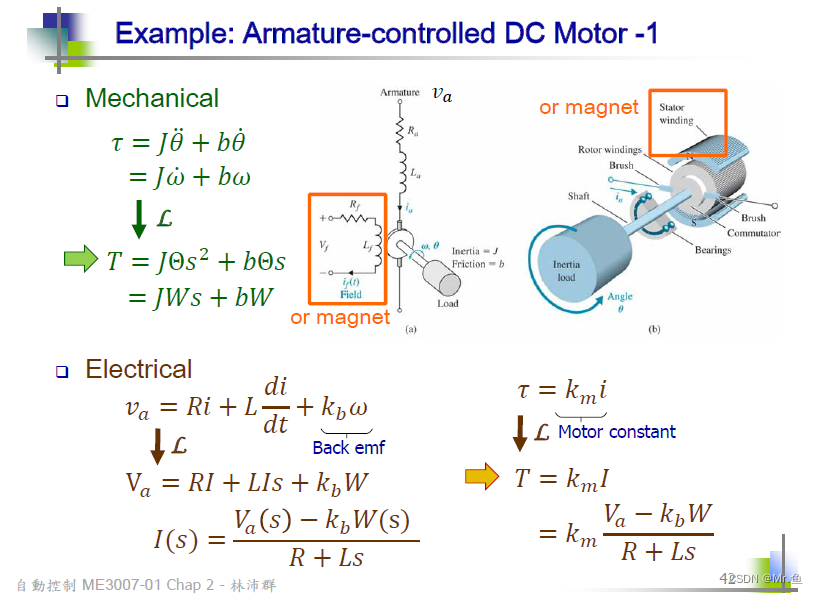
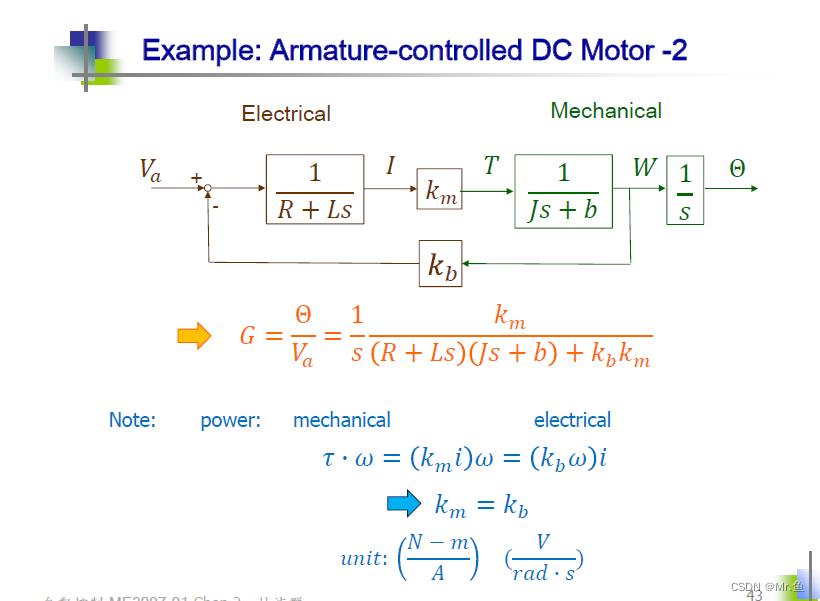
(1)微分方程,从物理系统的特性去建立物理公式,一般都是微分方程,只要能得到微分方程的解基本上就可以得到控制量
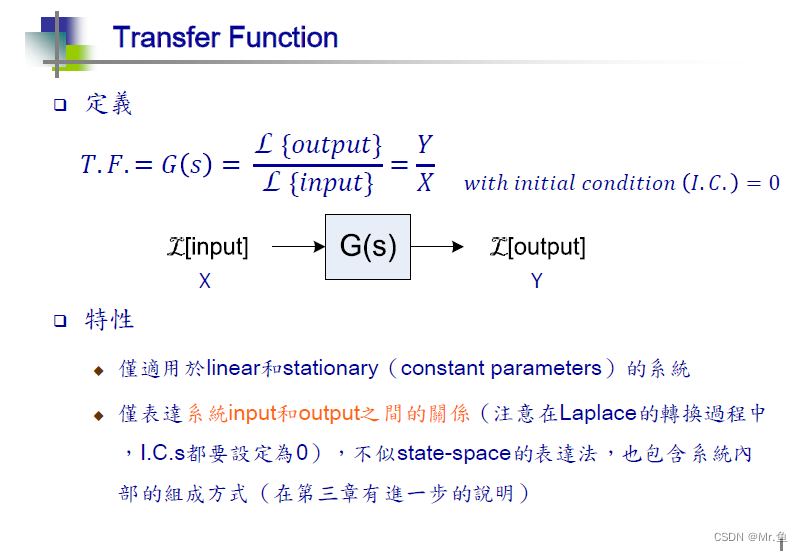
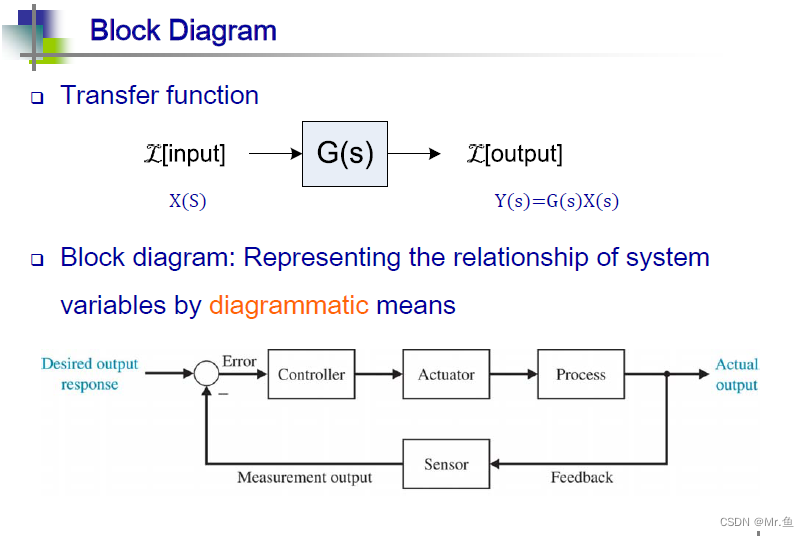
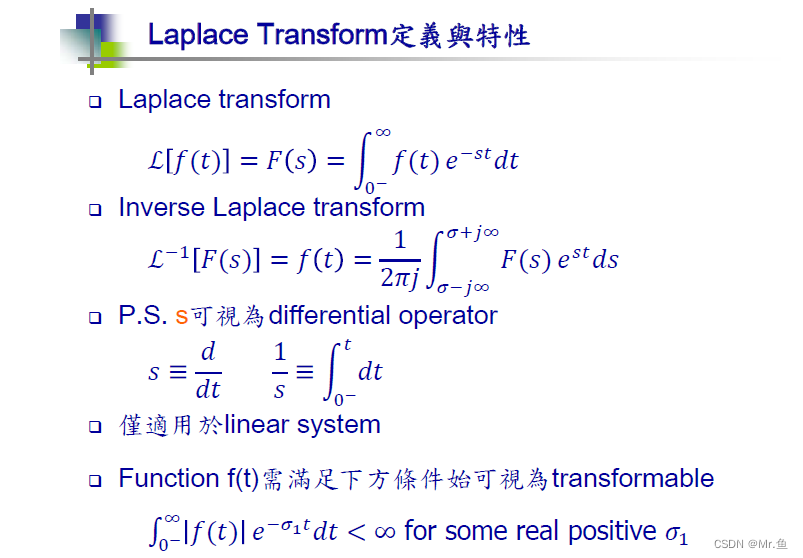
(2)传递函数,传递函数:输出与输入的比,一般都物理微分方程转到频率domain的函数,即进行拉普拉斯变换
(3)impluse response 与传递函数类似
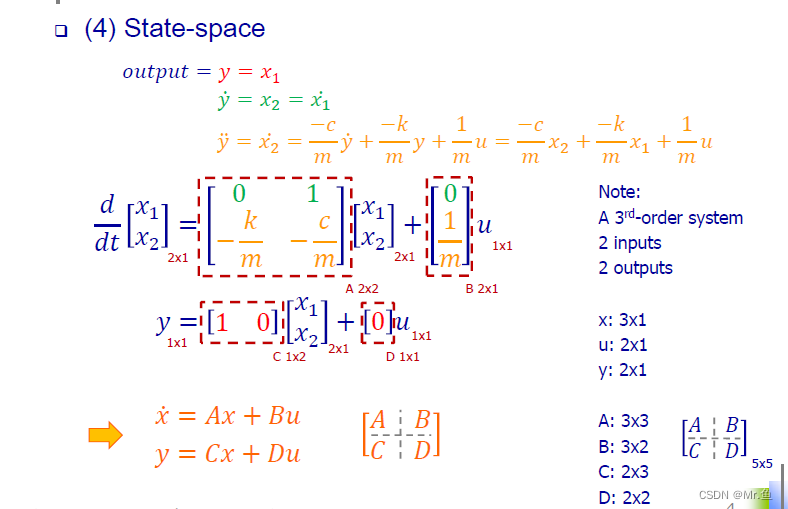
(4)状态空间 (这是现代控制理论的主要方向)
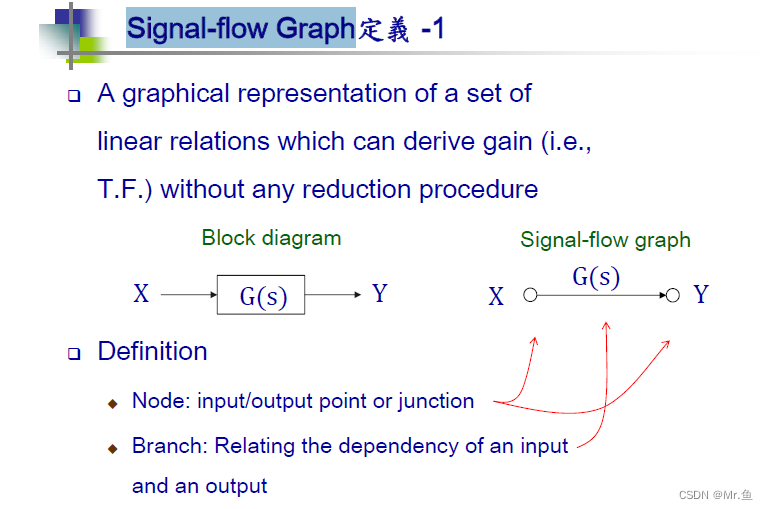
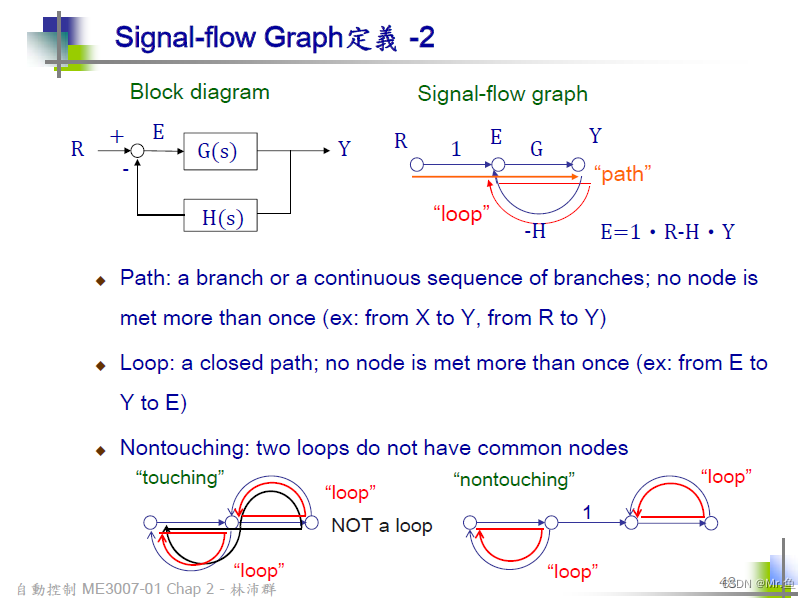
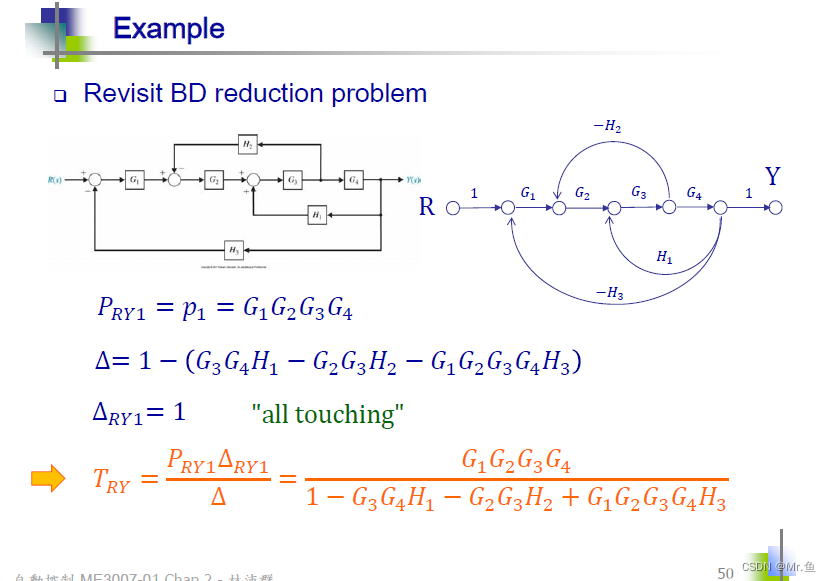
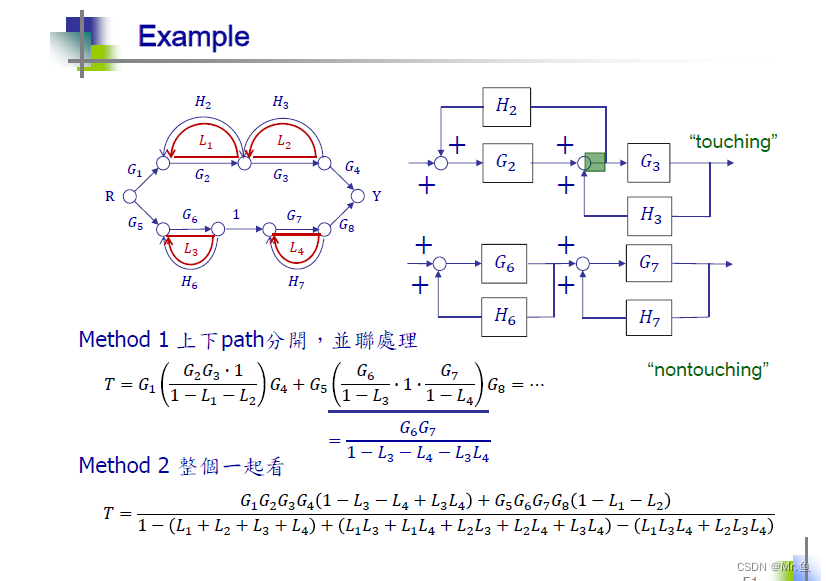
(5)signal-flow
以上5种表达如下:
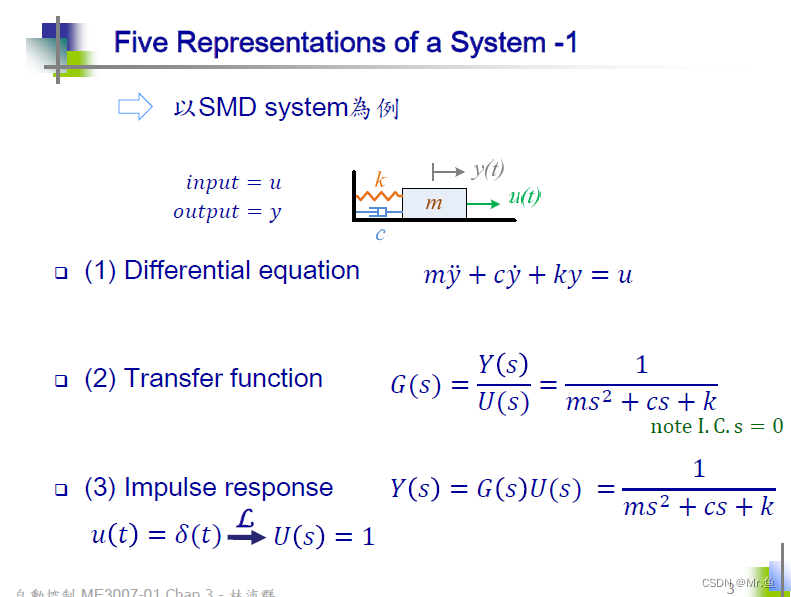
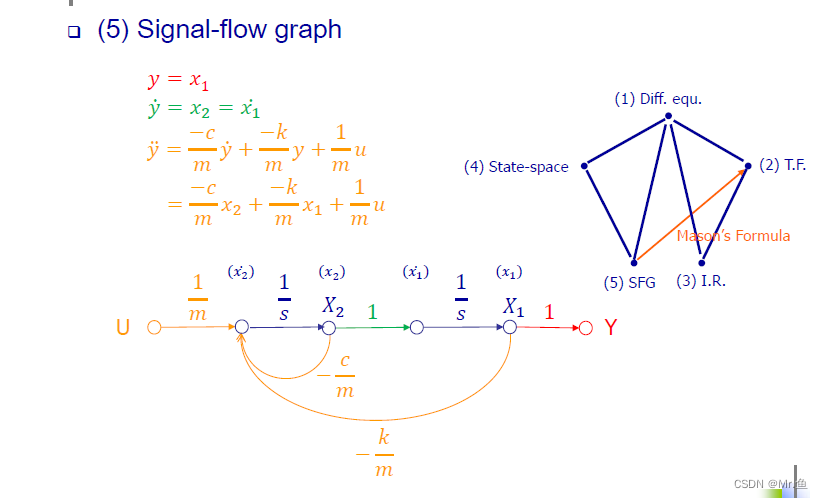
5种表达是可以互相转换的,如上图右边的无向图表示。不管那种表达,自控的核心就算根据数学表达模型去求微分方程解。
重点了解传递函数
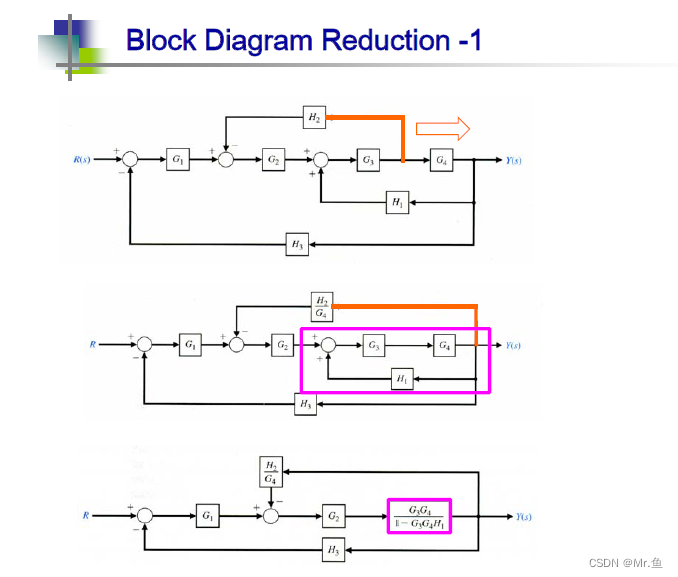
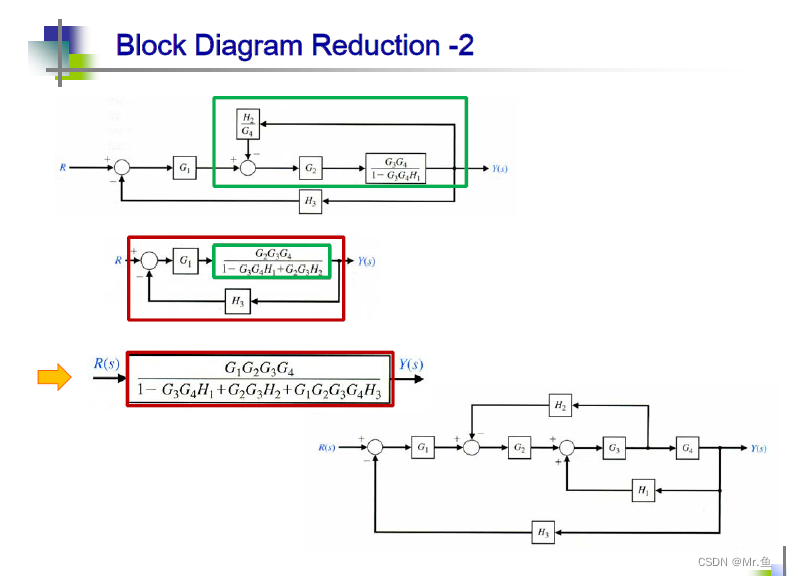
传递函数的BLOCK Diagram表达(一般在matlab里面用)
Signal-flow Graph 表示

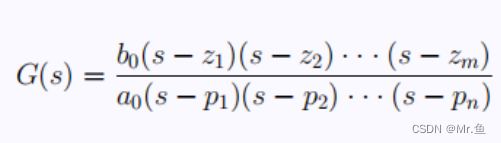
分子分母多项式 表示(极点、零点表达),极点就算分母为零的点,零点就算分子为零的点,这两个点很重要,后面用来判断系统的稳定性等。
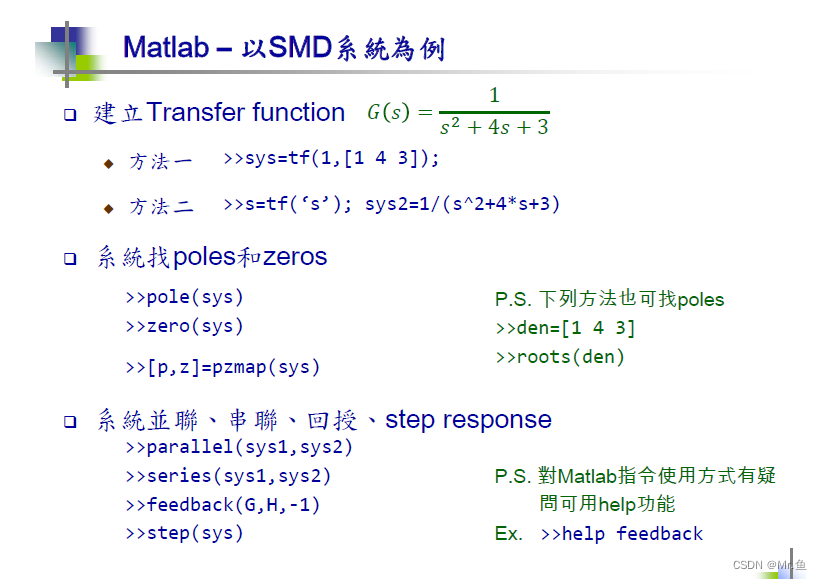
Matlab关于传递函数的指令
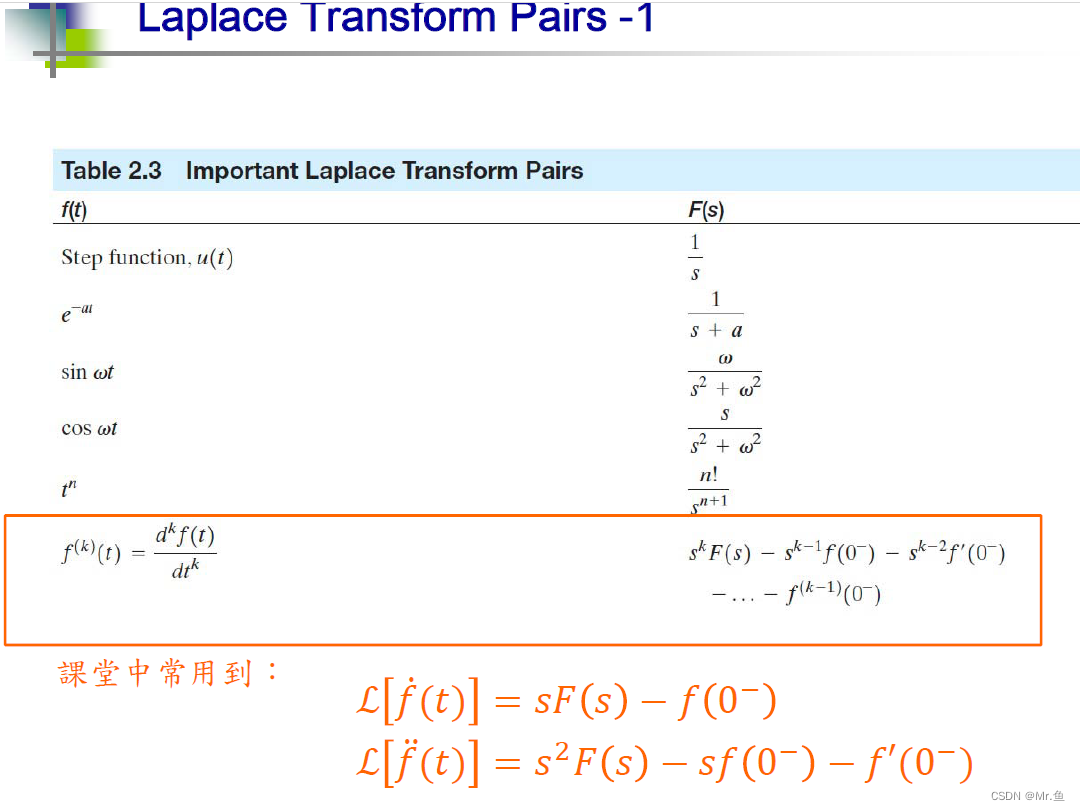
补充:拉普拉斯变换 包括常见方程的拉普拉斯

















 669
669

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









