







1.目标
- 地理坐标系的角速度
2.已知量
- 机体坐标系的角速度 gyro_x, gyro_y,gyro_z;
- 欧拉角,pitch,roll,yaw,参考我的上一章节姿态解算知识点1——四元数互补滤波
3.算法总框图
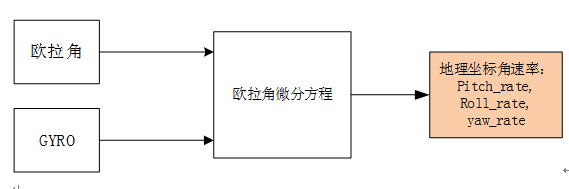
4.数学模型和公式推导
这里坐标系取东北天 --- 右前上
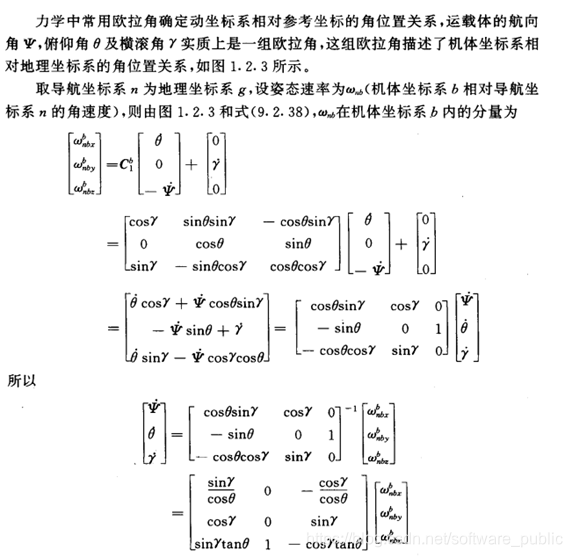
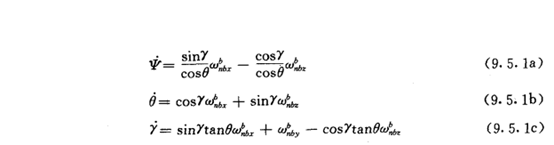
由以上求得地理坐标系的角速度为:
5.代码实现
欧拉角微分方程算法代码
6.数据曲线
- 地理坐标系角度速率曲线效果图
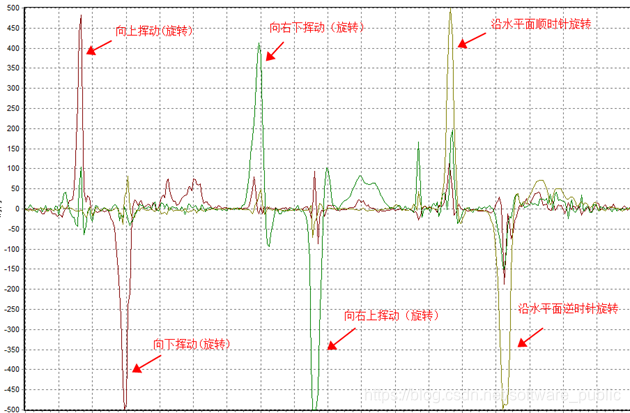
红色曲线-pitch_rate
绿色曲线- roll_rate
棕色曲线- yaw_rate
7.参考文献
- 惯性导航——秦永元
- 惯性导航基本原理——刘保中

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









