







 本文介绍了如何在已经实现的Yolov5实时目标检测系统中,结合测距文件distance.py,通过自定义函数miao_distance计算苗的高度。主要涉及测距文件的编写、引入和detect.py文件的修改,以便在检测时显示苗的实际距离。
本文介绍了如何在已经实现的Yolov5实时目标检测系统中,结合测距文件distance.py,通过自定义函数miao_distance计算苗的高度。主要涉及测距文件的编写、引入和detect.py文件的修改,以便在检测时显示苗的实际距离。
首先大家可以参考这篇博客部署好自己的环境:http://t.csdnimg.cn/erGYw
本文前提:已实现yolov5通过摄像头实时目标检测
一、测距文件的编写
首先需要知道自己所用的相机的像素焦距,并将其加入测距代码distance.py文件里
苗的高度18.1(单位英寸→对应cm/2.54)
foc = 933.33 # 镜头焦距
real_hight_miao = 18.1 # 苗高度
# 自定义函数,单目测距
def miao_distance(h):
dis_inch = (real_hight_miao * foc) / (h - 2)
dis_cm = dis_inch * 2.54
dis_cm = int(dis_cm)
dis_m = dis_cm/100
return dis_m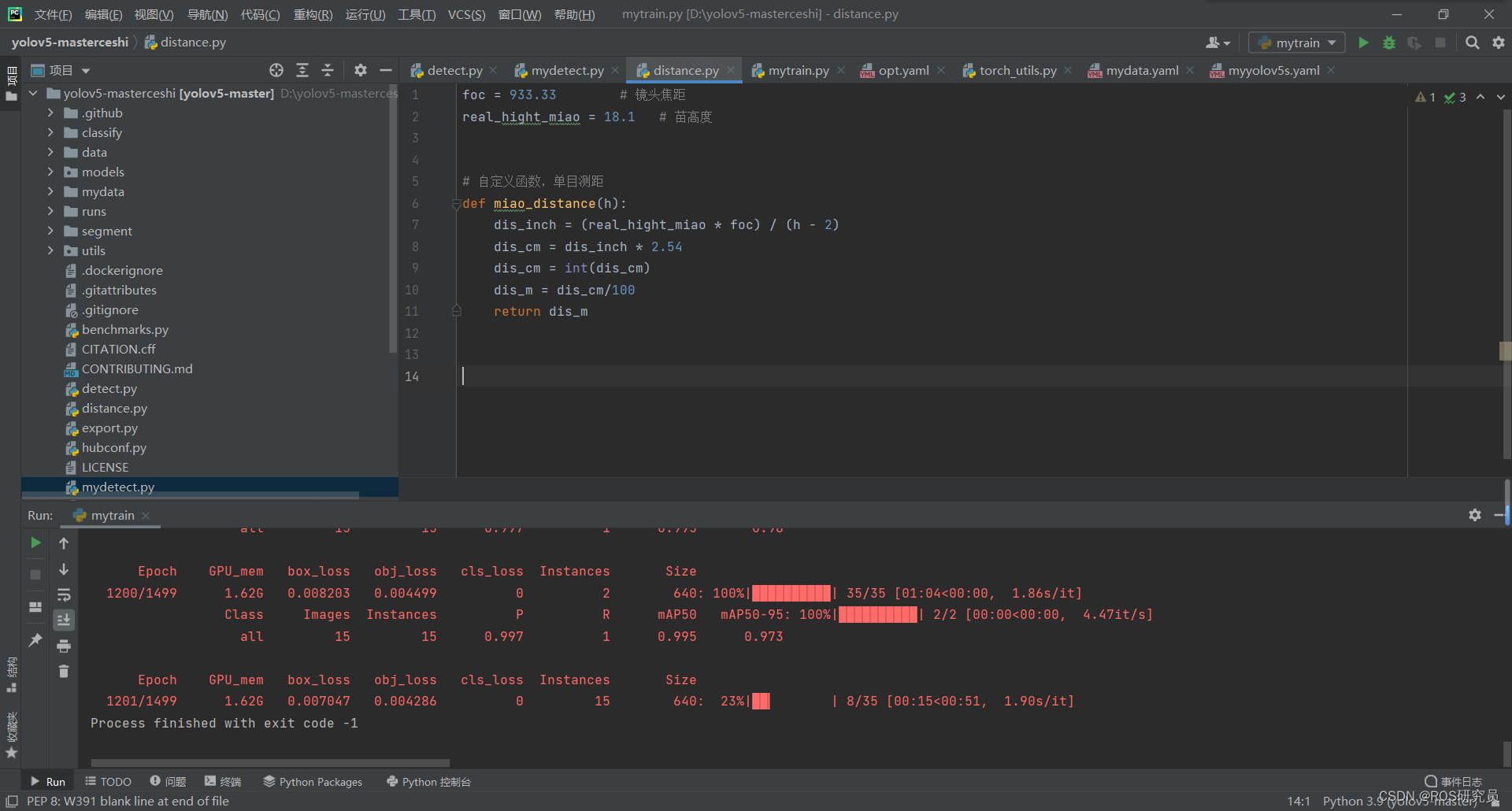
二、测距文件的引入
然后在detect.py文件中加入以下代码
from distance import miao_distance 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











