







浅谈当前机器人坐标
坐标系统标识统一
一般机器人通常使用右手坐标系,ROS里面用的也是右手坐标系。
左:左手坐标系,右:右手坐标系。
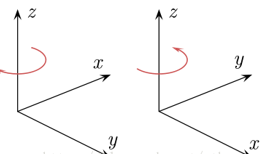 记忆:大拇指是z轴,食指是x轴(右手指往内转动)。我们说旋转多少度时,都以右手手指往内攥的方向为正方向。
记忆:大拇指是z轴,食指是x轴(右手指往内转动)。我们说旋转多少度时,都以右手手指往内攥的方向为正方向。
坐标变换
习惯上,我们表示一个物体的三维位置和朝向时,都会在其身上附一个随动的坐标系。所以描述一个物体在坐标系中的位置和朝向,总是可以等效为描述物体自身坐标系和别的坐标系之间的关系。
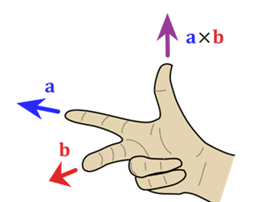
旋转矩阵:表示两个坐标系之间的旋转关系。
举例:表示导航小车自身的坐标系和地图坐标系之间的旋转关系。如上所述,我们描述机器人在地图中的姿态,一般不会讲机器人在地图坐标系中的坐标,而是讲机器人自身的坐标系和地图坐标系之间的旋转平移关系。(虽然它和机器人的坐标在数值上是一样的)
连续的旋转变换:
比如从C旋转成B,再从B旋转成A,那么从C到A的旋转矩阵就是按顺序从后往前直接连乘。
前面我们说了旋转,而平移很简单,就是向量之间的加减。目前,我们平移加旋转一个物体,想得物理世界一个固定点在移动后的物体的坐标系里的坐标,我们得先计算平移,再计算旋转。
而齐次坐标变换的作用就是将两者统一成一个矩阵,矩阵左上角是旋转矩阵,右侧为平移向量。
齐次坐标转换矩阵统一了平移和旋转,方便了坐标变换的逆运算、多坐标系的连续变换,运算规则和旋转矩阵类似。
机器人运动学
机器人运动学包括正向运动学和逆向运动学,正向运动学即给定机器人各关节变量,计算机器人末端的位置姿态;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 6492
6492











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









