








操作步骤跟树莓派一致,使用软件及配置有微调
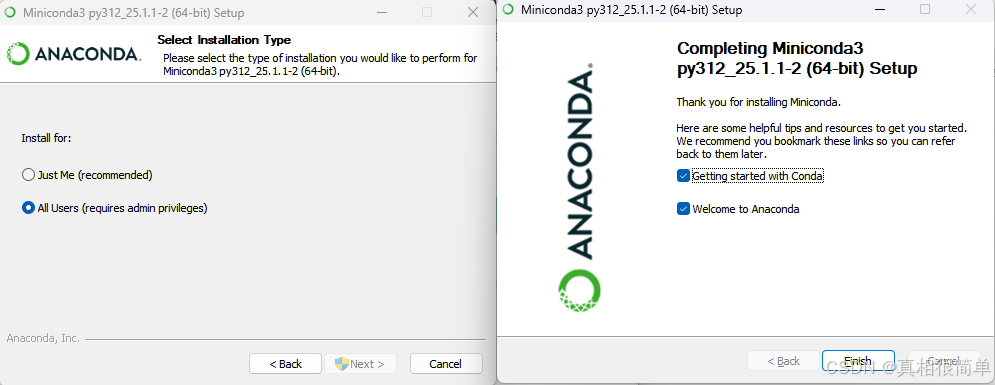
1. Windows安装 Miniconda
# 官网地址:https://www.anaconda.com/download
# 百度网盘:https://pan.baidu.com/s/1_dN5fS9zDNipNQ2oPna-BA?pwd=zhen
基于安装包安装
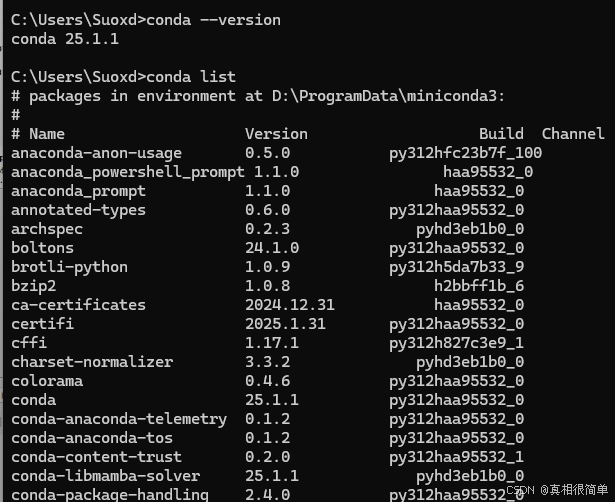
# 添加环境变量
D:\ProgramData\miniconda3
D:\ProgramData\miniconda3\Scripts
D:\ProgramData\miniconda3\Library\bin
2. 配置机器人环境
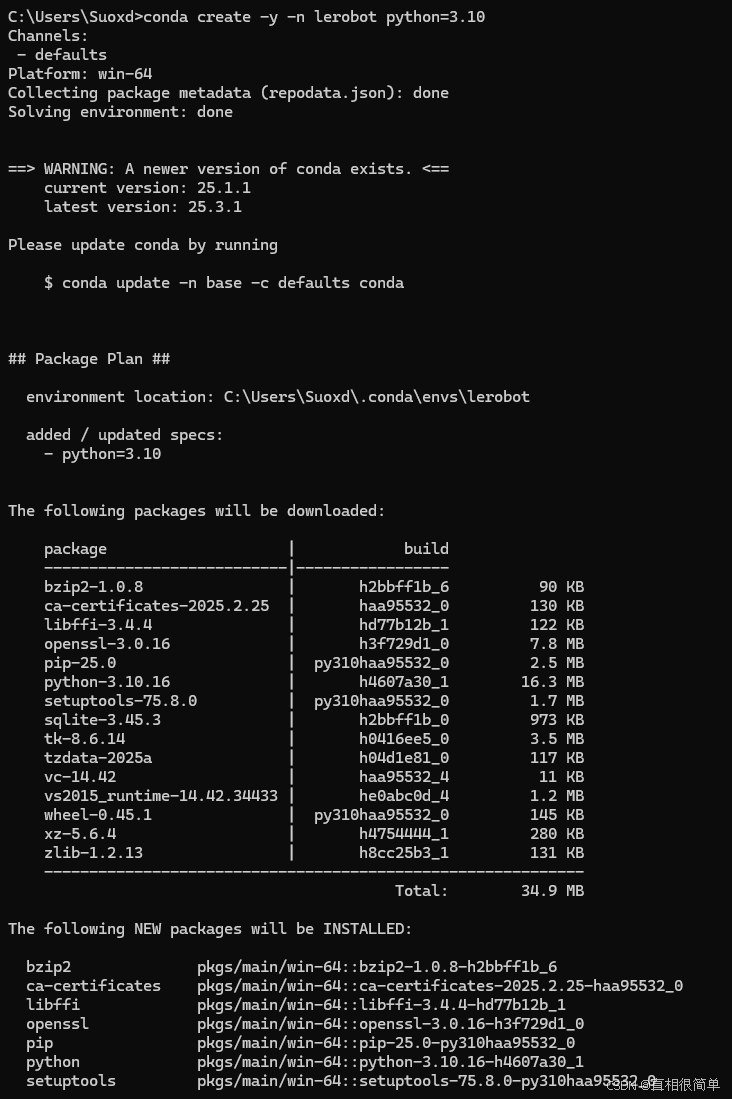
2.1 Conda配置
# 创建激活全新 conda 环境
conda create -y -n lerobot python=3.10
conda activate lerobot
2.1 LeRobot配置
# 下载安装Lerobot
git clone git@github.com:huggingface/lerobot.git
cd lerobot
pip install -e ".[feetech]"
2.3 github 免科学上网
- 源码直接从百度网盘下载lerobot-main.zip
- 拷贝到树莓派系统(scp命令或者使用WinScp软件)
- 解压:unzip lerobot-main
- 重命名:mv mv lerobot-main lerobot
配置环境
3. 异常记录
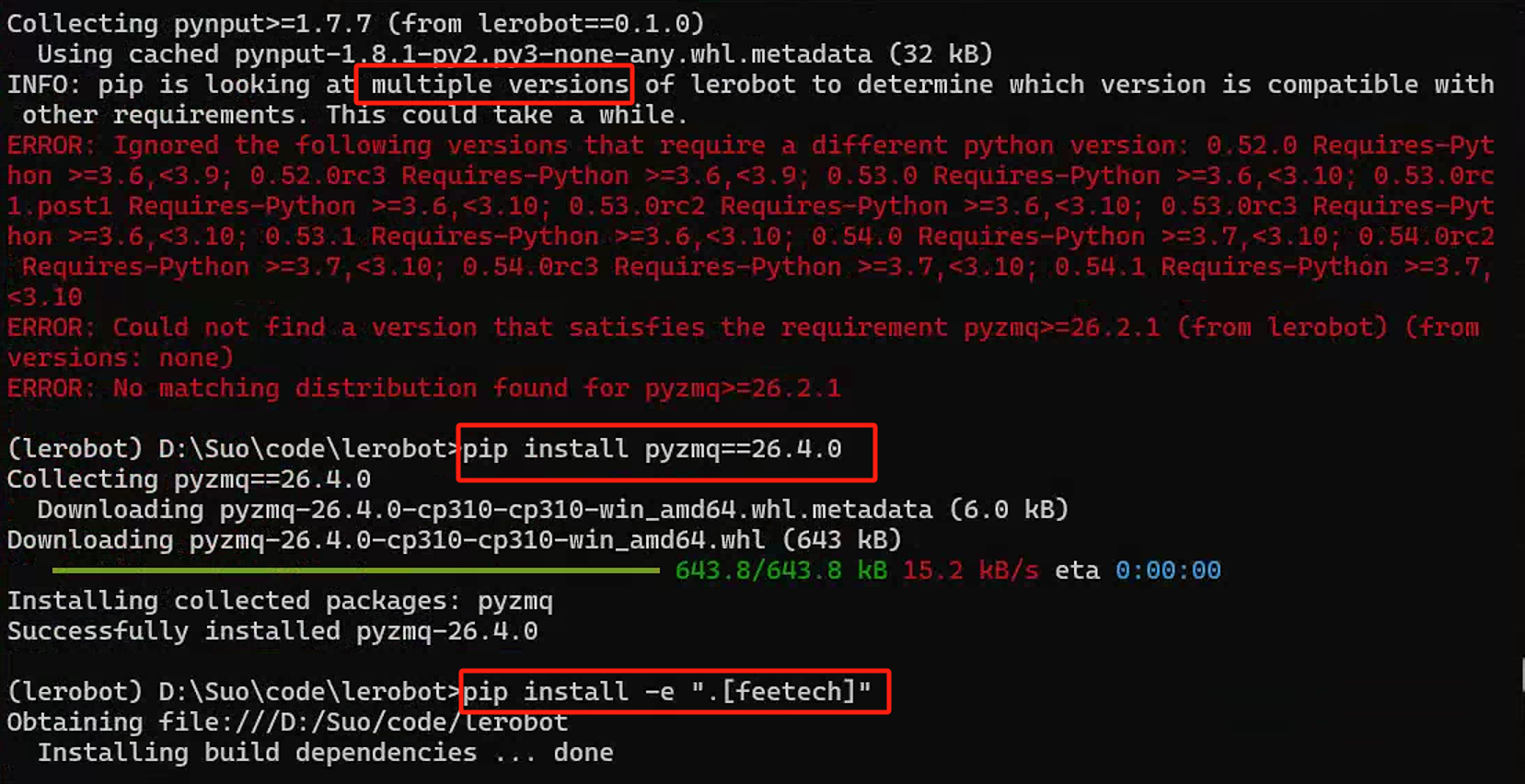
3.1 pyzmq找不到适配版本,则指定版本安装
pip install pyzmq==26.4.0
# 解决问题后,继续原来安装
pip install -e ".[feetech]"
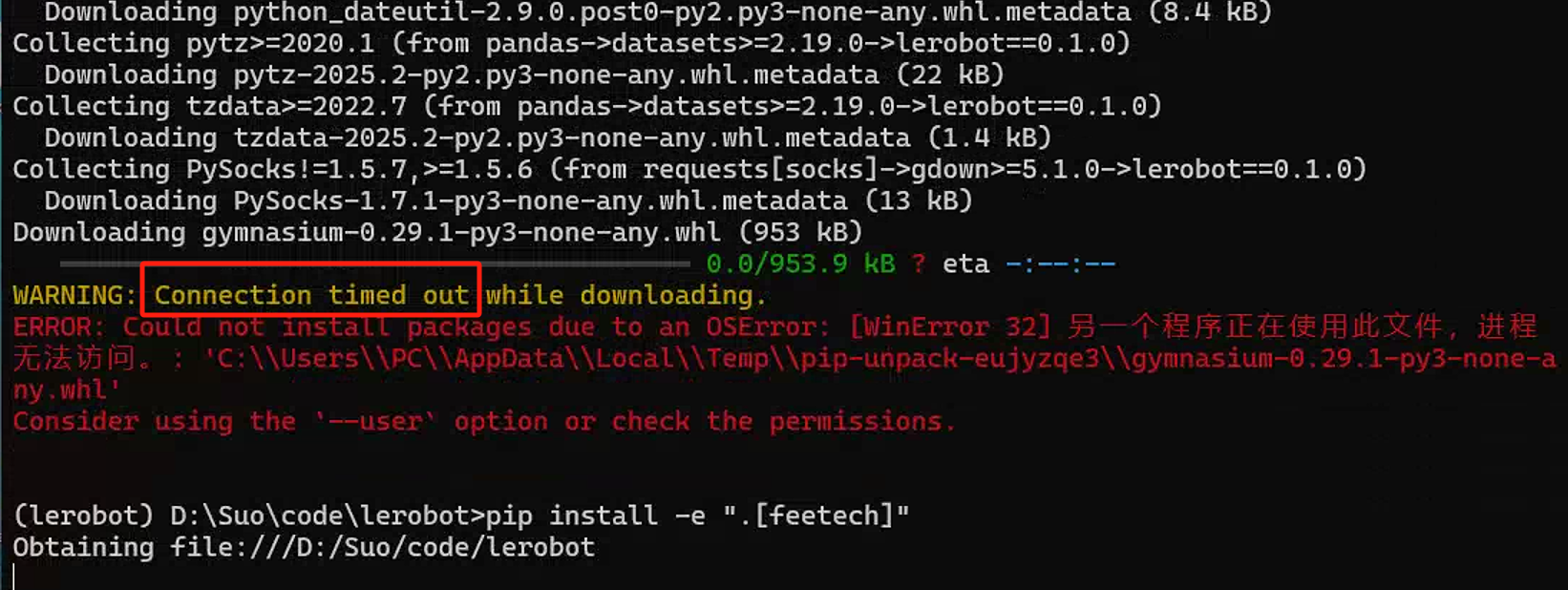
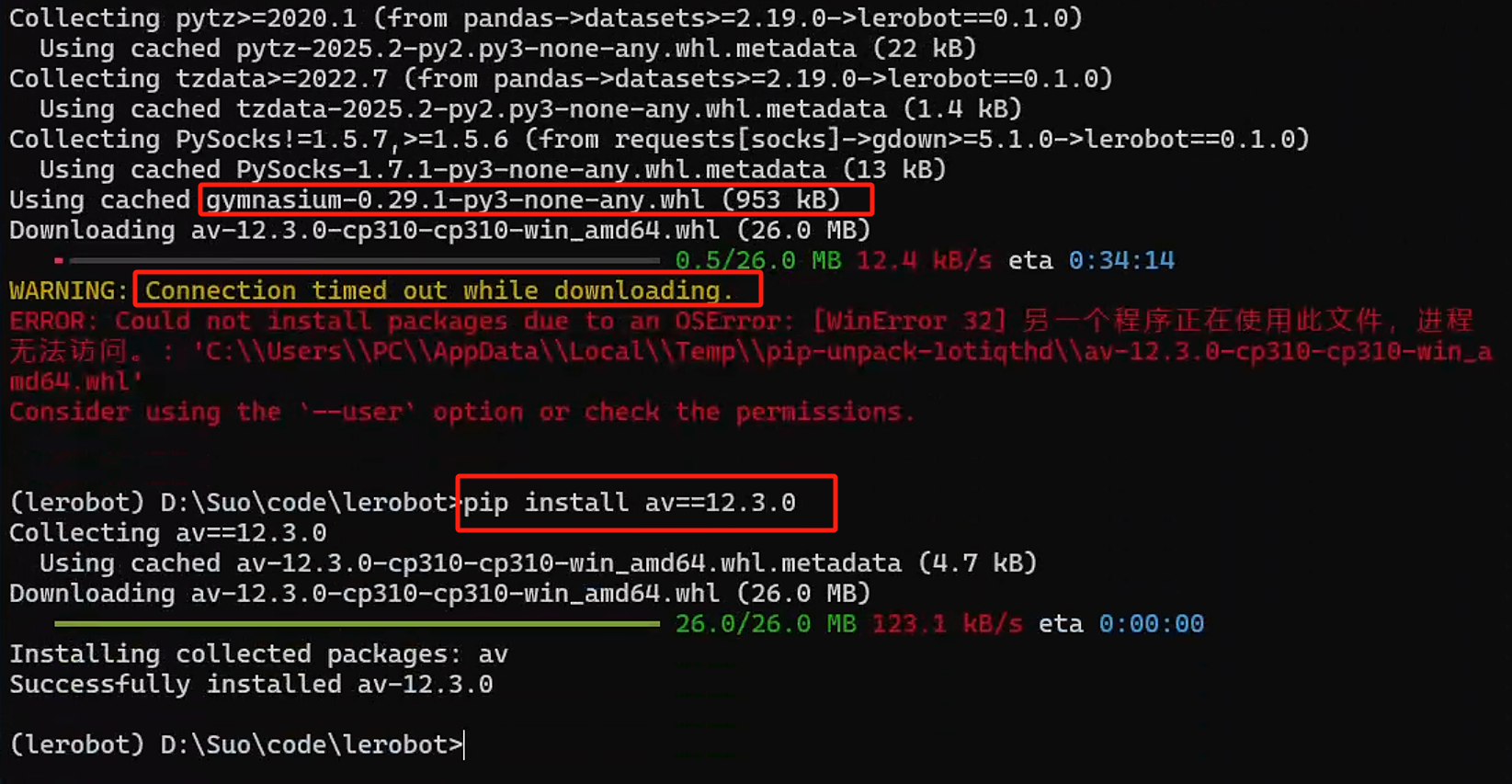
3.2 提示超时,多执行几次或者单独安装即可
4. 常用linux指令说明
导航计算机的文件系统以及基本级别的任务,例如创建、复制、重命名和删除:
- 在目录 (文件夹) 结构中移动:cd
- 创建目录:mkdir
- 创建文件(并修改其元数据):touch
- 复制文件或目录:cp
- 移动文件或目录:mv
- 删除文件或目录:rm
- 下载在特定 URL 中找到的文件:curl
- 在较大的文本正文中搜索文本片段:grep
- 逐页查看文件的内容: less, cat
- 操作转换文本流:awk, tr, sed
具身开源套件部分课程如下,欢迎联系合作采购(全套开源)



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











