






鱼眼相机光线传递
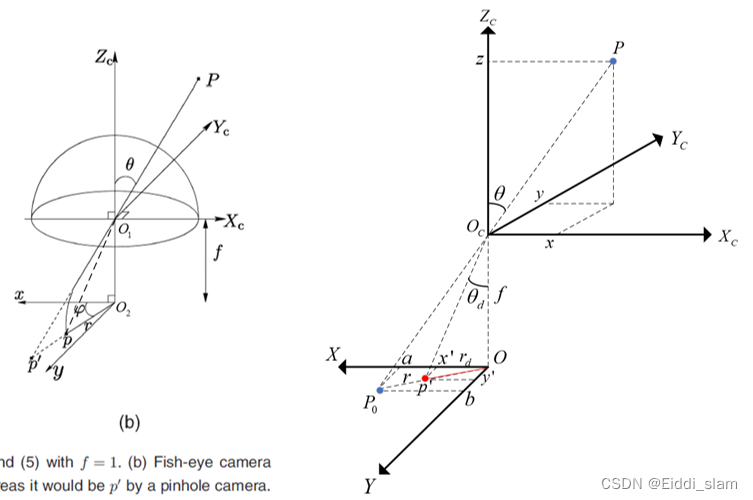
在左侧图中,真实点P进行投影,如果按照小孔模型,则投影到p‘点,鱼眼相机则投影到p点。
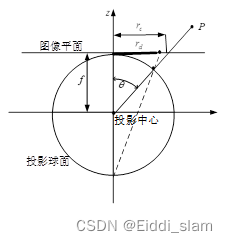
右图中pr点就是鱼眼相机像素点。
真实点P到鱼眼相机中像素坐标的变换过程如下。
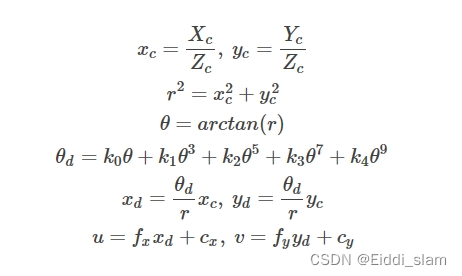
归一化坐标->小孔模型下的r->求入射角theta->根据多项式方程求theta_d->求rd(第一张图右侧的图)->求rd对应的xd和yd->求得鱼眼相机的像素坐标。其中根据theta_d求的rd的过程设计到投影函数。上述公式5的形式中rd = theta_d,其实是rd = f * theta_d(这个公式与投影函数有关,具体形式后面介绍),这里f = 1.
投影函数(这里的角度应该是出射角theda_d, theda_d = balabala * theta(入射角))
等距投影模型
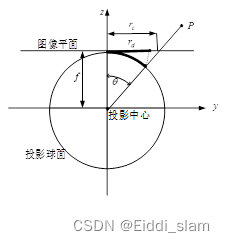
rd=fθd,也就是采用的弧长。
等立体角投影模型
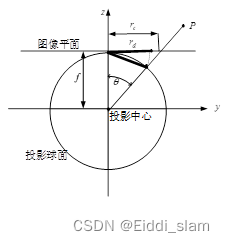
rd=2fsin(θd/2),弦长。
正交投影模型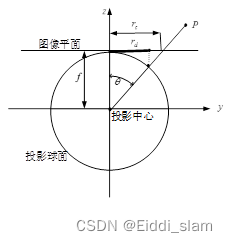
rd=fsin(θd),比较好理解。其实就是单孔模型
体视投影模型
rd=2ftan(θd/2)

















 1439
1439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









