






 本文介绍了一种改进的A*算法,通过优化启发式函数和动态调整代价函数,提升了AGV路径规划的准确性和效率。仿真代码对比实验显示,改进算法在处理大规模地图时表现更优。
本文介绍了一种改进的A*算法,通过优化启发式函数和动态调整代价函数,提升了AGV路径规划的准确性和效率。仿真代码对比实验显示,改进算法在处理大规模地图时表现更优。
基于改进A*算法的AGV路径规划算法仿真代码
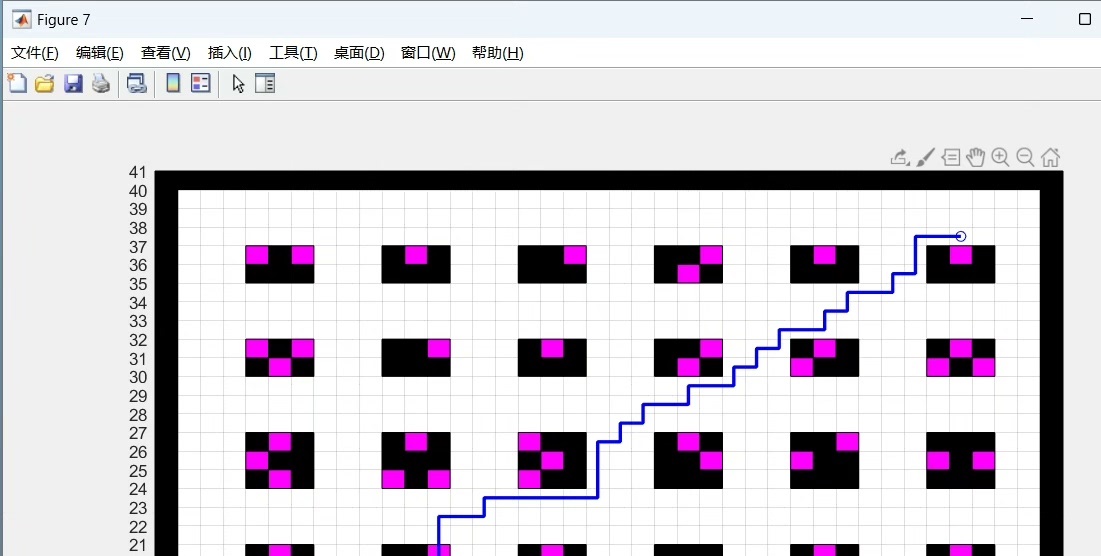
改进对比结果如下
可自行更改地图,起始点目标点
ID:78120710674741162
喜欢可爱的猫猫


随着自动化技术的发展和应用,无人自动导航车(AGV)在物流、仓储、制造等领域越来越广泛地应用。AGV的路径规划算法对其运行效率和安全性起着至关重要的作用。本文基于改进A算法,对AGV路径规划算法进行了仿真代码的设计和实现,并与传统A算法进行了对比。
AGV路径规划算法是指在给定地图中,通过一系列的算法来确定AGV在起始点和目标点之间的最优路径。传统的A算法通过维护一个开放列表和一个关闭列表,根据启发式函数和代价函数来评估每个节点的优先级,并选择优先级最高的节点进行探索。然而,传统A算法在处理大规模地图时存在运行效率低和路径不连续的问题。
为了改进传统A算法的不足之处,本文提出了一种改进A算法。该算法在启发式函数的选择上进行了优化,使用曼哈顿距离代替欧几里得距离作为启发式函数,以减少计算量并提高路径规划的准确性。同时,引入了代价函数的动态调整策略,根据AGV在运行过程中的实时状态进行调整,以保证路径的连续性和兼顾运行效率。
为了验证改进A算法的有效性,本文设计了一套仿真代码,并与传统A算法进行了对比实验。实验结果表明,改进A算法在路径规划的准确性和运行效率上均优于传统A算法。对于同一地图,改进A算法能够找到更短的路径,并且路径连续性更好。此外,改进A算法在处理大规模地图时也能够保持较高的运行效率。
该仿真代码支持用户自行更改地图、起始点和目标点,以适应不同的应用场景。通过简单的配置和调整,用户可以快速得到最优路径,提高AGV的运行效率和安全性。
总结而言,本文基于改进A算法设计了一套AGV路径规划算法的仿真代码,并通过对比实验验证了其在准确性和运行效率上的优势。改进A算法可以在实际应用中提供更好的路径规划效果,为AGV的自动导航提供了有力支持。希望本文的研究能够对AGV路径规划算法的改进和应用提供有益的参考。
以上相关代码,程序地址:http://wekup.cn/710674741162.html















 1921
1921











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









