






 本文介绍了在多AGV系统中,通过优化A*算法和引入时间窗口规划,减少路径冲突的路径规划方法。MATLAB仿真展示了算法在避免冲突和提高效率方面的效果,同时生成路径图和时空图以可视化AGV的行动轨迹。
本文介绍了在多AGV系统中,通过优化A*算法和引入时间窗口规划,减少路径冲突的路径规划方法。MATLAB仿真展示了算法在避免冲突和提高效率方面的效果,同时生成路径图和时空图以可视化AGV的行动轨迹。
基于改进A*算法的多AGV路径规划,MATLAB仿真程序,时间窗口规划,传统是8个方向,可以斜着规划路径,改进为上下左右4个方向,仿真避开冲突问题 ,输出路径图,时空图。
ID:8539708619508160
请叫我醉04551
基于改进A*算法的多AGV路径规划
在现代物流领域,自动导引车(Automated Guided Vehicle,AGV)的应用越来越广泛。AGV能够自主导航,执行物流任务,提高物流效率。多AGV系统是一种常见的配置,其中多台AGV协同工作,完成复杂的物流操作。在多AGV系统中,路径规划是一个关键的问题,它直接影响系统的效率和安全性。
本文将介绍一种基于改进A*算法的多AGV路径规划方法,并使用MATLAB进行仿真。此方法通过引入时间窗口规划和路径冲突避免策略,提高了路径规划的效率和可靠性。
首先,我们来了解一下传统的路径规划方法。传统方法通常采用8个方向进行规划,即可以朝上、下、左、右移动,也可以朝斜上、斜下、斜左、斜右移动。这样的路径规划方法可以满足一般情况下的需求,但在多AGV系统中可能存在路径冲突的问题。
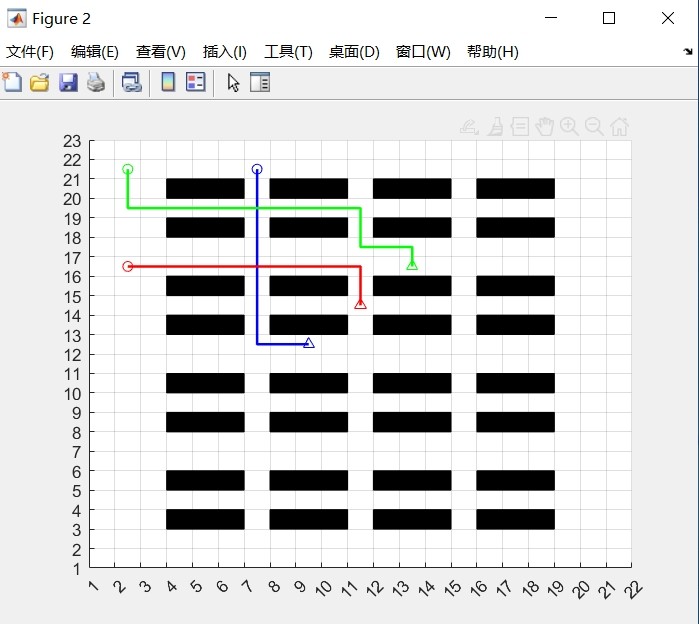
为了解决路径冲突问题,我们对传统方法进行改进。改进后的方法只考虑上下左右4个方向的移动,而不考虑斜向移动。这样做的好处是可以大大降低路径冲突的概率。例如,当多台AGV从不同起点出发,朝着同一个目标点移动时,它们的路径将不再交叉,避免了冲突的发生。
为了评估改进后的路径规划方法的效果,我们使用MATLAB进行了仿真。首先,我们定义了多台AGV的起始点和目标点,以及每个AGV的任务时间窗口。时间窗口规划是指每个AGV在规定的时间范围内完成任务。我们将这些信息输入到仿真程序中,并运行程序进行路径规划。
在路径规划的过程中,我们使用改进A算法来搜索最优路径。改进A算法是一种启发式搜索算法,它利用启发函数估计路径的代价,并选择最合适的路径。在我们的仿真程序中,我们根据AGV的当前位置、目标位置以及时间窗口信息,设计了特定的启发函数。通过不断迭代搜索,我们得到了每台AGV的最优路径。
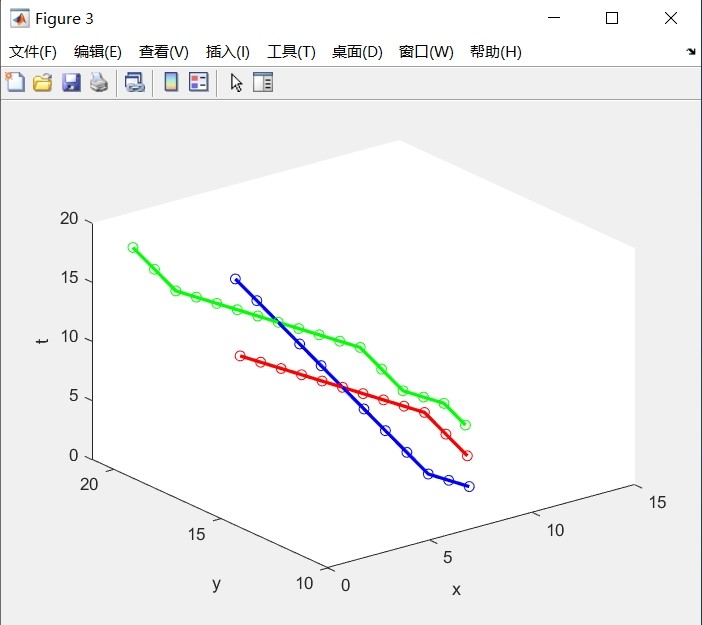
在路径规划完成后,我们将路径图和时空图输出。路径图展示了每台AGV的运动路径,可以清晰地看到它们在物流环境中的移动轨迹。时空图则展示了每个位置在不同时间段的访问情况,可以帮助我们更好地了解AGV的分布情况和任务执行情况。
综上所述,本文介绍了一种基于改进A*算法的多AGV路径规划方法,并使用MATLAB进行仿真。该方法通过引入时间窗口规划和路径冲突避免策略,提高了路径规划的效率和可靠性。通过路径图和时空图的输出,我们可以更好地理解AGV的移动轨迹和任务执行情况。这种改进的路径规划方法为多AGV系统的实际应用提供了重要的技术支持。
注意:本文所述方法只是一种参考,并不代表所有情况下的最优解。具体的路径规划方法需要根据实际应用需求和系统特点进行选择和改进。
以上相关代码,程序地址:http://wekup.cn/708619508160.html
















 6718
6718

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









