







参考资料:
1.凌青老师的凸优化课(b站)
2.Stephen Boyd的《凸优化》中译本(清华大学出版社)
什么是优化(Optimization)
优化(optimization)又叫数学规划(Mathematical Programming)。
优化:从一个可行解的集合中,寻找出最优的元素。
三要素缺一不可:可行解的集合、寻找的方法、有最优的元素。
优化问题的数学表达形式
minimize f 0 ( x ) subject to f i ( x ) ⩽ b i , i = 1 , ⋯ , m \begin{array}{ll} \operatorname{minimize} & f_{0}(x) \\ \text {subject to} & f_{i}(x) \leqslant b_{i}, \quad i=1, \cdots, m \end{array} minimizesubject tof0(x)fi(x)⩽bi,i=1,⋯,m
其中:
x
x
x 称为优化变量(Optimization Variable),是一个向量
x
=
(
x
1
,
⋯
,
x
n
)
x=\left(x_{1}, \cdots, x_{n}\right)
x=(x1,⋯,xn)
f
0
(
x
)
f_{0}(x)
f0(x) 称为目标函数(Objective Function),它是一个n维空间到1维空间的映射,即
f
0
:
R
n
→
R
f_{0}: \mathbf{R}^{n} \rightarrow \mathbf{R}
f0:Rn→R。
f
i
(
x
)
f_{i}(x)
fi(x) 是一组不等式约束(Inequality Constraint),
f
i
:
R
n
→
R
f_{i}: \mathbf{R}^{n} \rightarrow \mathbf{R}
fi:Rn→R
我们的目标是找到一个
x
⋆
x^{\star}
x⋆,是一个最优解(Optimal)。
如果
x
⋆
x^{\star}
x⋆是一个Optimal,那么它等价于:
存在任意向量
z
z
z,满足所有的约束条件
z
∈
{
f
1
(
z
)
⩽
b
1
,
⋯
,
f
m
(
z
)
⩽
b
m
}
z\in\{ f_{1}(z) \leqslant b_{1}, \cdots, f_{m}(z) \leqslant b_{m}\}
z∈{f1(z)⩽b1,⋯,fm(z)⩽bm}的情况下,有:
f
0
(
z
)
⩾
f
0
(
x
⋆
)
f_{0}(z) \geqslant f_{0}\left(x^{\star}\right)
f0(z)⩾f0(x⋆)
上面
{
f
1
(
z
)
⩽
b
1
,
⋯
,
f
m
(
z
)
⩽
b
m
}
\{ f_{1}(z) \leqslant b_{1}, \cdots, f_{m}(z) \leqslant b_{m}\}
{f1(z)⩽b1,⋯,fm(z)⩽bm}集合称为可行解集(feasible set)。
最优解同样可能存在最优解集,即不止有一个最优解。
举例1
以一元函数举例,图:
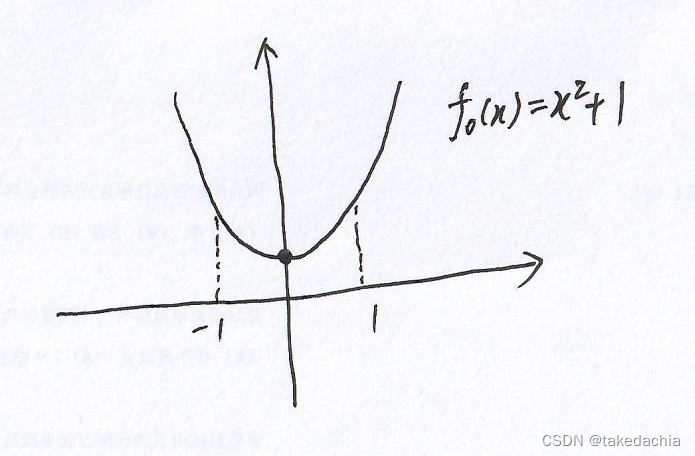
求[-1,1]区间内函数最小值。
转化为优化问题:
目标函数:
f
0
(
x
)
=
x
2
+
1
f_{0}(x)=x^2+1
f0(x)=x2+1
可行解集:
x
⩽
1
,
−
x
⩽
1
x\leqslant1,-x\leqslant1
x⩽1,−x⩽1
求最优解(解得
x
=
0
x=0
x=0)
举例2(数据拟合问题)
有一组样本点(二维坐标系为例),需要拟合出一条线。
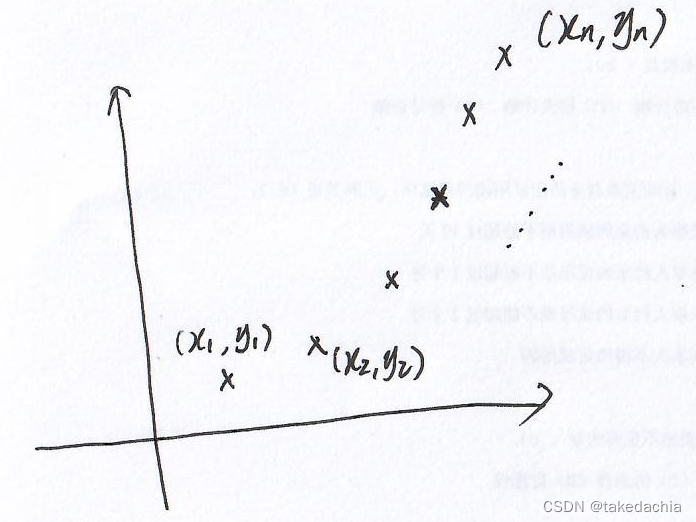
我们设这条线为一个二项式 y = a x 2 + b x + c y=ax^2+bx+c y=ax2+bx+c,各项的系数a、b、c为待估参数,设为向量 w = ( a , b , c ) w=(a,b,c) w=(a,b,c)。
目标函数:
f
0
(
w
)
=
∑
i
=
1
n
[
y
i
−
(
a
x
i
2
+
b
x
i
+
c
)
]
2
f_{0}(w)=\sum_{\mathrm{i}=1}^{\mathrm{n}} [y_i-(ax_i^2+bx_i+c)]^2
f0(w)=∑i=1n[yi−(axi2+bxi+c)]2,
i
i
i为各样本点。
求最优解,这是一个典型的最小二乘问题。
优化问题的分类
线性规划、非线性规划
若优化问题中,目标函数和约束函数
f
0
,
.
.
.
,
f
m
f_0,...,f_m
f0,...,fm 都是线性函数,即对任意的
x
,
y
∈
R
n
x,y \in\mathbf{R}^{n}
x,y∈Rn 和
α
,
β
∈
R
\alpha,\beta\in\mathbf{R}
α,β∈R,都有:
f
i
(
α
x
+
β
y
)
=
α
f
i
(
x
)
+
β
f
i
(
y
)
,
i
=
0
,
1
,
.
.
.
,
m
f_{i}(\alpha x+\beta y)=\alpha f_{i}(x)+\beta f_{i}(y),i=0,1,...,m
fi(αx+βy)=αfi(x)+βfi(y),i=0,1,...,m
那么这样的优化问题称为线性规划。
如果
f
0
,
.
.
.
,
f
m
f_0,...,f_m
f0,...,fm 中有一个不是线性函数,那么该问题称为非线性规划。
给个线性规划的图例:
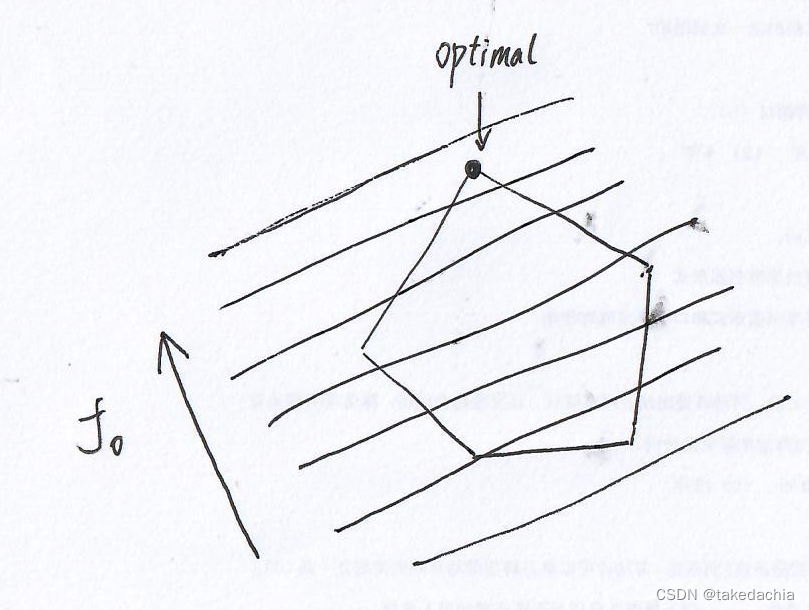
图中的五边形是由5个线性函数
f
1
,
.
.
.
,
f
5
f_1,...,f_5
f1,...,f5构成的可行解集,因为约束函数都是线性函数,所以可行解集一定长成这样的五边形形状。
同时,目标函数
f
0
f_0
f0也是一个线性函数,我们把目标函数放在空间中,它就会以不同的等高线呈现来表示它的值。
如果箭头方向为
f
0
f_0
f0下降的方向,那么它的最优解就在标出的黑点上。
凸规划、非凸规划
曾经人们把线性规划和非线性规划问题定义成简单问题和困难问题,后面发现把凸规划定义成简单问题,非凸规划定义成困难问题更好。
任意的线性规划问题一定是凸规划。凸规划可看成线性规划的扩展。
如果目标函数和约束函数都是凸函数,即对任意的
x
,
y
∈
R
n
x,y \in\mathbf{R}^{n}
x,y∈Rn 和
α
,
β
∈
R
\alpha,\beta\in\mathbf{R}
α,β∈R,且满足
α
+
β
=
1
,
α
⩾
0
,
β
⩾
0
\alpha+\beta=1,\alpha\geqslant0,\beta\geqslant0
α+β=1,α⩾0,β⩾0,下列不等式成立:
f
i
(
α
x
+
β
y
)
⩽
α
f
i
(
x
)
+
β
f
i
(
y
)
,
i
=
0
,
1
,
.
.
.
,
m
f_{i}(\alpha x+\beta y)\leqslant\alpha f_{i}(x)+\beta f_{i}(y),i=0,1,...,m
fi(αx+βy)⩽αfi(x)+βfi(y),i=0,1,...,m
这样的函数即为凸函数。
目标函数和约束函数都是凸函数的问题就是凸规划问题,也叫凸优化问题。
以上可见凸性是较线性更为一般的性质。因为它只需要满足不等式就行了。仅仅加上了一个α和β的取值限制。
其他分类
①光滑优化问题、非光滑优化问题
光滑和非光滑针对目标函数
f
0
f_0
f0而言。
光滑函数意味目标函数
f
0
f_0
f0在定义域上所有点都可微。
②连续优化问题、非连续优化问题
正对可行域而言。
如果可行域是连续的,为连续优化问题(如上面的五边形图)。
可行域是离散的,即为非连续优化问题。离散问题一般都是困难问题。
③单目标问题、多目标问题
对于多目标问题,比如我们想要优化两个目标函数:
minimize
f
1
(
x
)
,
f
2
(
x
)
\operatorname{minimize} f_{1}(x), f_{2}(x)
minimizef1(x),f2(x)
这就是多目标问题。
对于
f
1
,
f
2
f_{1}, f_{2}
f1,f2,我们常可画出两个函数值的曲线:
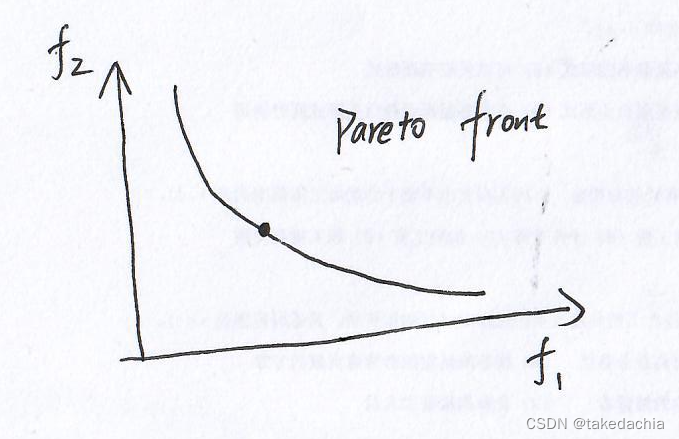
这条线又称帕累托曲面(Pareto front),我们难以找到一个点让两者最优,一般需要找个折中点。
所以我们一般需要将两者取加权,将多目标转化成单目标问题:
minimize
α
1
f
1
(
x
)
+
α
2
f
2
(
x
)
\operatorname{minimize} \alpha_1 f_{1}(x)+\alpha_2 f_{2}(x)
minimizeα1f1(x)+α2f2(x)
这只是一种解决方法,可能不一定有效。

















 3470
3470

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









