






视频讲解
墙线提取,线段提取与分割合并、圆弧检测、内外直角检测 · 语雀
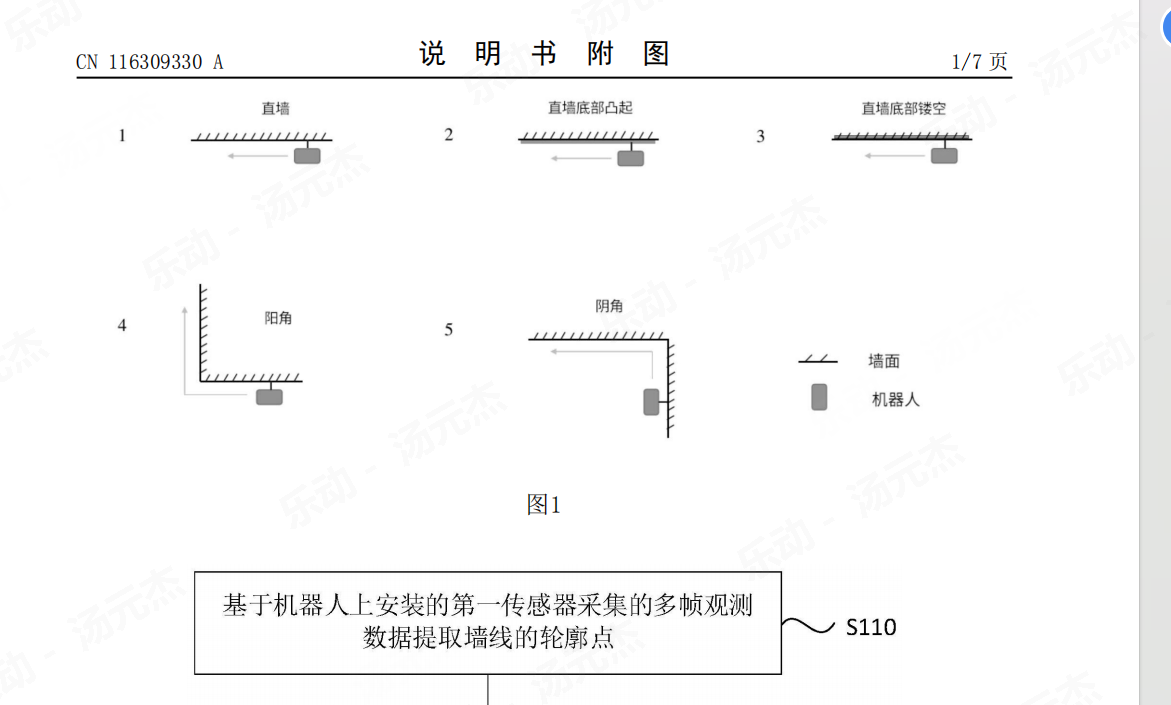
背景,实现目的
用于改善长直墙近距离沿墙效果;
实现原理
step: 每间隔一定位移检测右侧直线段并生成segment历史序列,检测segment检测的连续性和稳定性;(lidar数据中检测直线段稳定出现条件严苛,避免误检测;)
step: 检测实时的右侧linelaser数据,判断是否为竖直线;
定义一个概念:稳定沿竖直墙;
触发稳定沿竖直墙的条件:
lidar检测出的水平segment稳定出现;(判断条件严苛,连续出现,平行,重叠)
机器位姿与稳定的segment近似平行;
机器位姿在segment左侧一定距离内;
右侧linelaser数据判断为竖直线;
当检测出稳定沿竖直墙时,屏蔽lidar带噪声实时数据计算出的wall_dis,防止抖动或者wall_dis太近触发的emergency;
参考
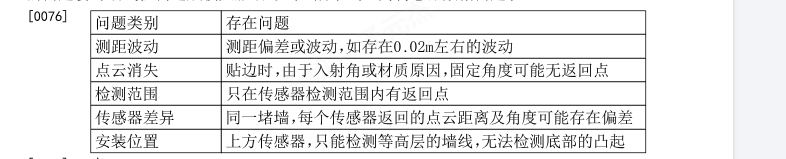
📎一种墙线检测方法、装置、电子设备、存储介质及机器人.pdf
使用历史数据的目的或者原因:
lidar近距离测得的点云会有严重的拖尾/类似拖尾问题(特别是针对tof雷达)(近距离时候两个激光脉冲的信号峰重叠);

效果
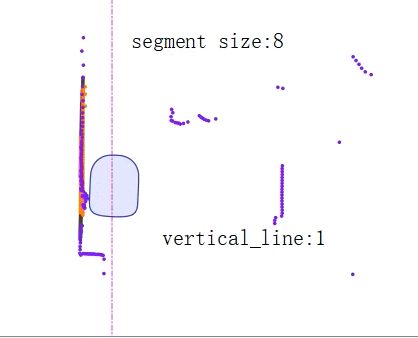
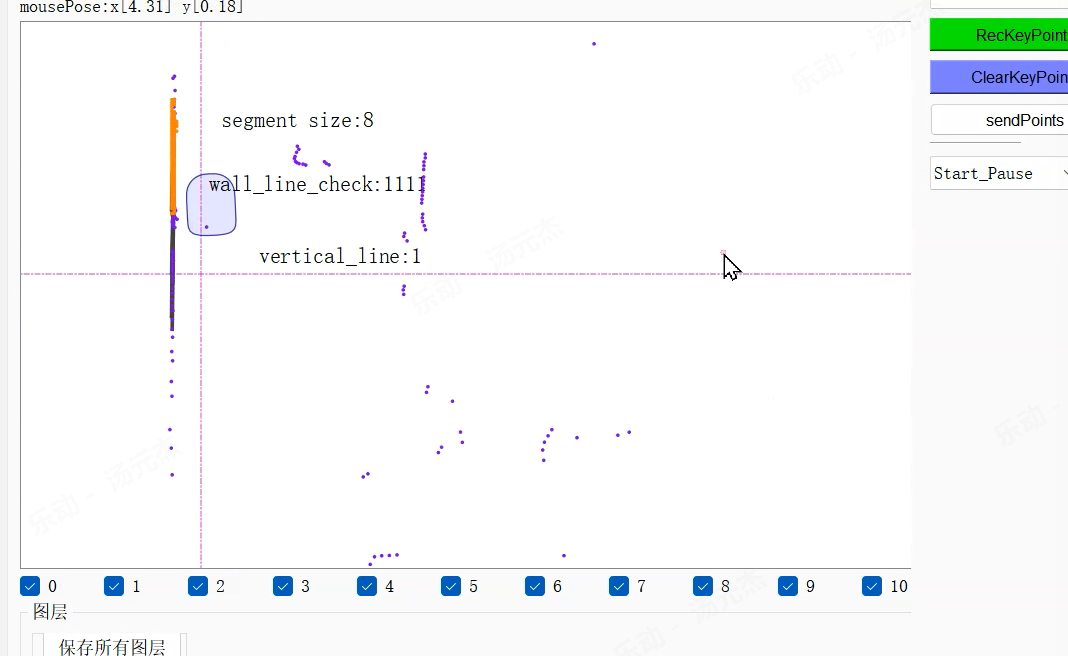
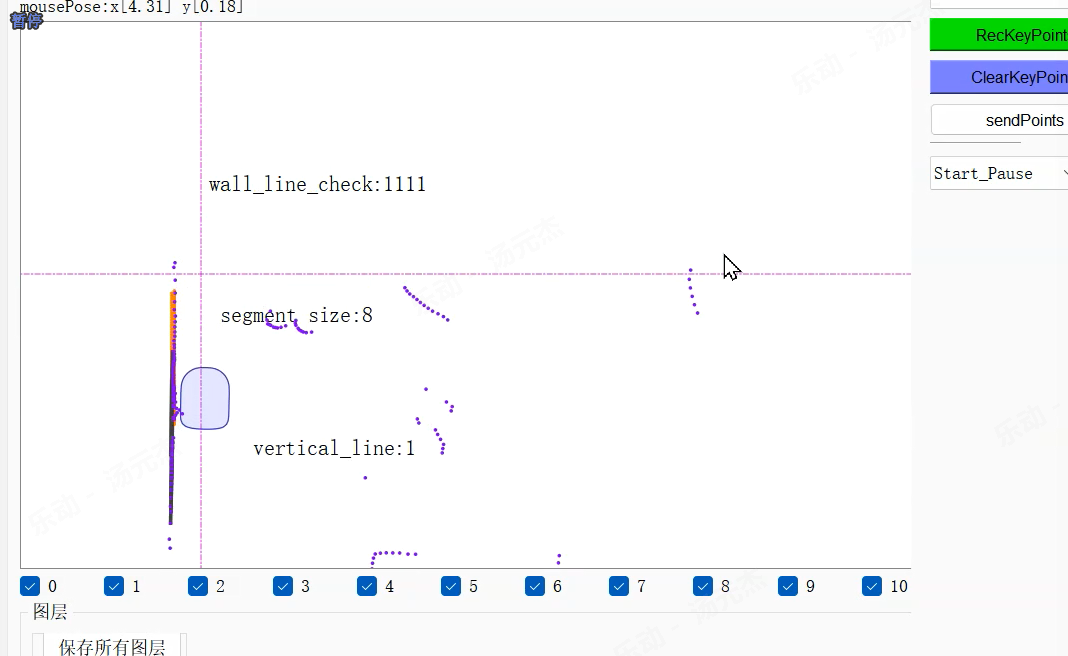
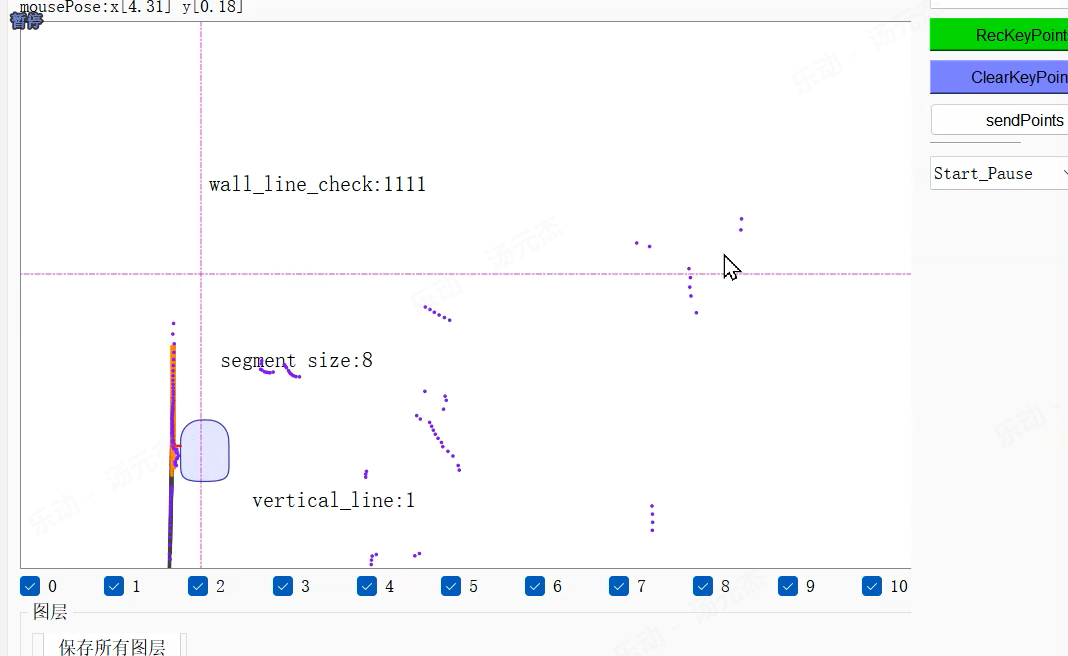

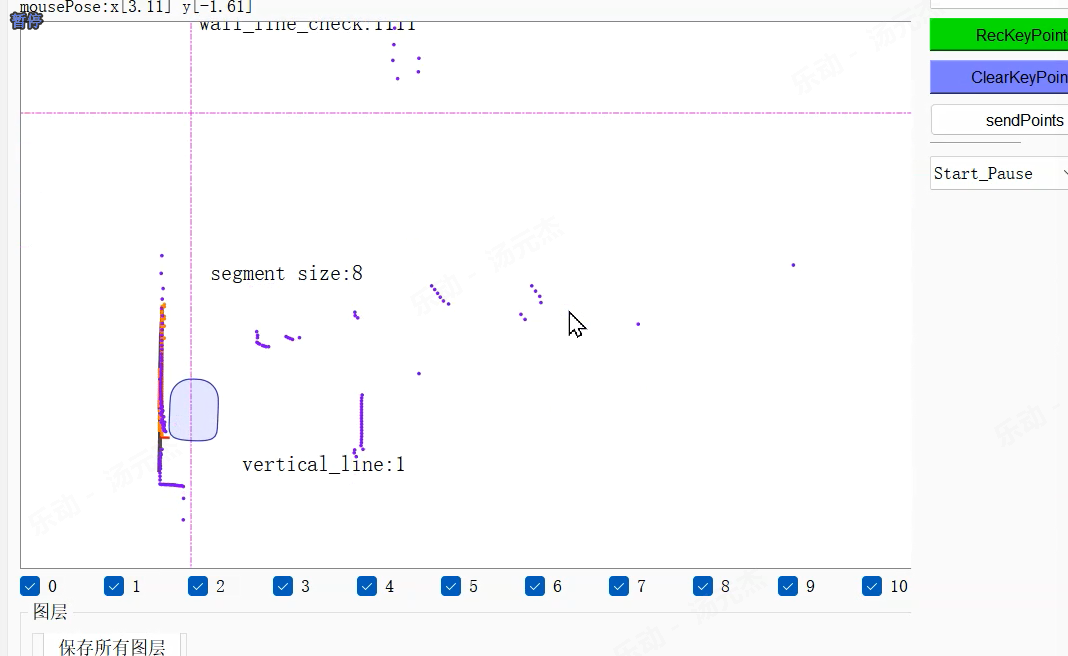

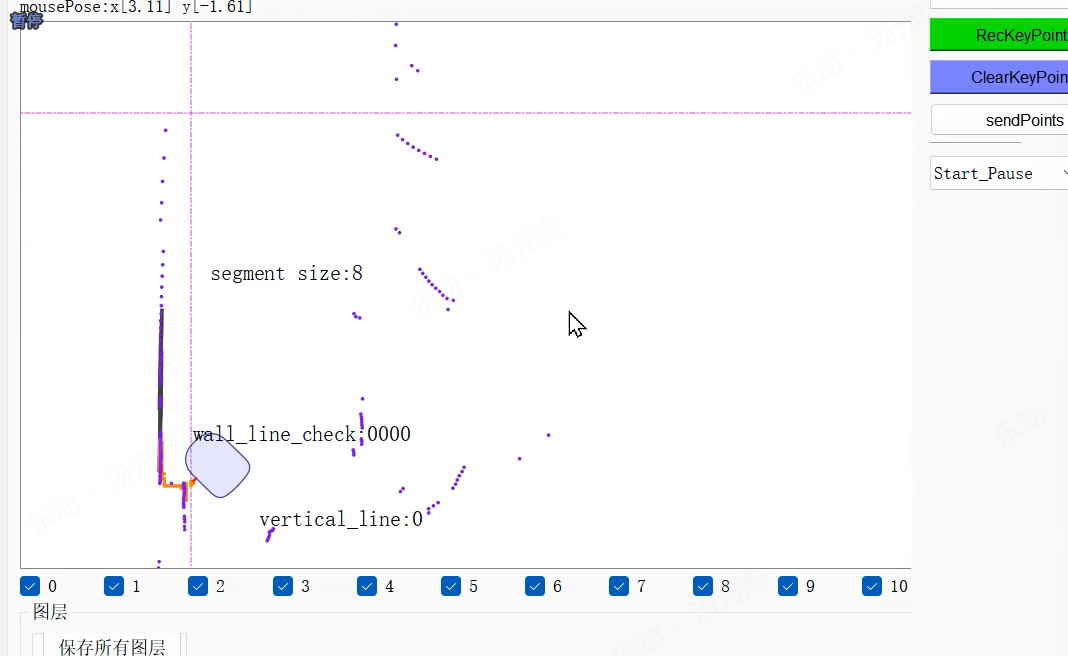
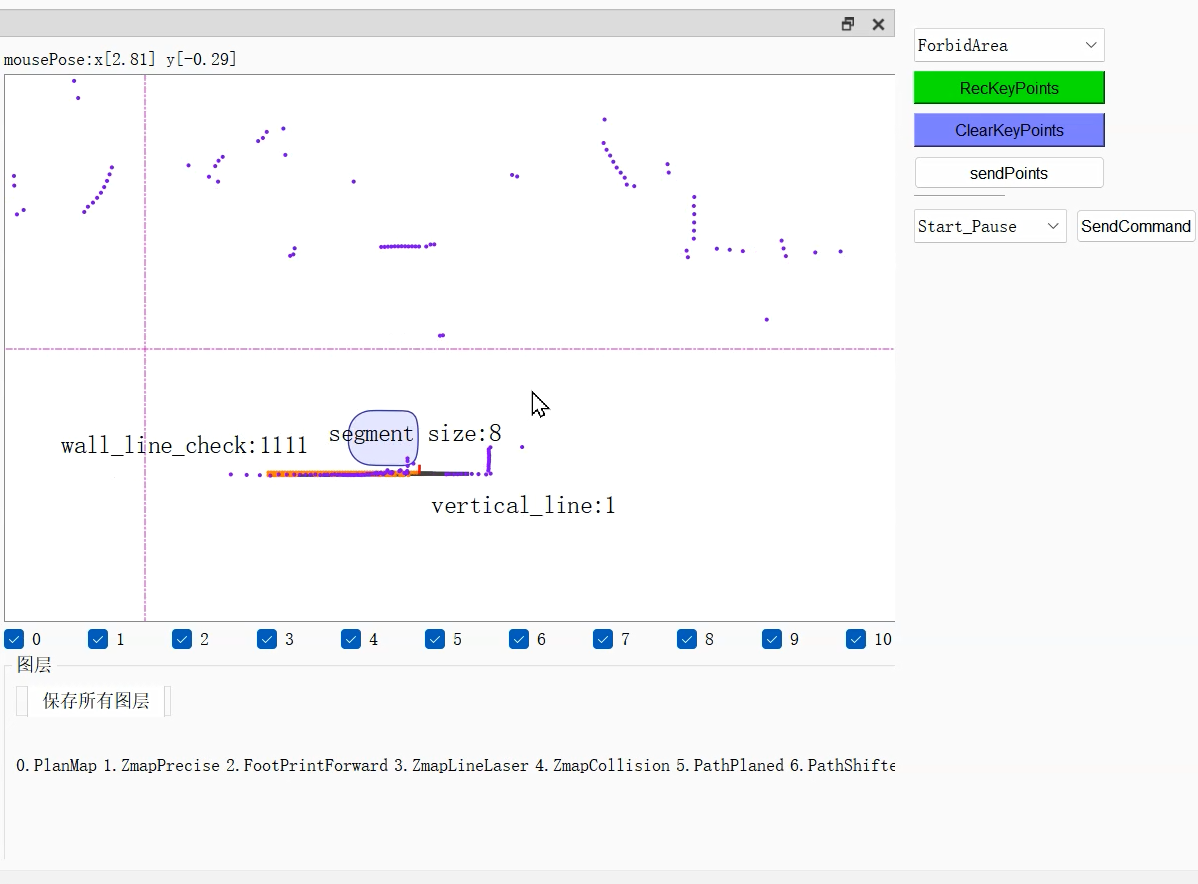
上图中,当wall_line_check为1111时表示四个条件同时满足,触发 稳定沿竖直墙 状态;
segment size 表示缓存的检测到的线段的队列;最多八条,队列满了之后删除最初的数据;
vertical line 表示当前右侧线激光检测到的障碍物点是否为竖直线;(右侧线激光打出去的平面是一个竖直面,对于同一面直墙,线激光检测到的竖直线在地图中的投影为一个点而且落在lidar检测到的墙线上)
效果:
能够在沿长直墙时实现零贴边无抖动;
code附录
墙线检测
#pragma once
#include "local_zmap_mixed.h"
#include "pose2d.h"
#include "utils/singleton.h"
#include "zmq_simple/visualization_debug.h" // 用于发送地图和其他重要的调试信息到上位机
#include <list>
#include <mutex>
struct Point3f;
class WallLineDetector
{
// 检测到的lidar线段
struct LidarDataInfo {
uint64_t TimeStampMs; // 时间戳
Pose2D CarPose; // 机器位姿
// std::vector<std::pair<float, float>> Points; // 原始lidar点
// bool ExistLineSegment; // 是否存在直线段
std::pair<Pose2D, Pose2D> LineSegment; // 检测到的直线段,只存一段
LidarDataInfo()
{
TimeStampMs = 0;
// ExistLineSegment = false;
}
};
// 检测右侧linelaser是否为竖直线
struct LineLaserInfo {
uint64_t TimeStampMs; // 时间戳
bool IsLineLaserRight_VerticalLine; // 右侧是否为竖直线
LineLaserInfo()
{
TimeStampMs = 0;
}
};
struct CheckResult {
// 同时满足以下条件认为是在稳定的沿直墙
bool steadySegment; // 判断 segment 是否稳定
bool carSegmentAngleOk; // 判断机器与最近的segment夹角是否合理
bool carSegmentPosOk; // 机器在segment起点坐标系下的位姿是否合理
bool carVerticalOk; // 竖直检测结果是否合理
CheckResult()
{
steadySegment = false;
carSegmentAngleOk = false;
carSegmentPosOk = false;
carVerticalOk = false;
}
void Reset()
{
steadySegment = false;
carSegmentAngleOk = false;
carSegmentPosOk = false;
carVerticalOk = false;
}
// 判断两个状态是否没区别
bool operator==(CheckResult &other)
{
return (steadySegment == other.steadySegment && carSegmentAngleOk == other.carSegmentAngleOk &&
carSegmentPosOk == other.carSegmentPosOk && carVerticalOk == other.carVerticalOk);
}
bool IsAllOk()
{
return (steadySegment == true && carSegmentAngleOk == true &&
carSegmentPosOk == true && carVerticalOk == true);
}
};
public:
WallLineDetector() {}
~WallLineDetector() {}
void Init()
{
mLidarInfoList.clear();
mLineLaserInfoList.clear();
mIsEnabled = true;
mLastCheckTickMs = GetCurrentTickMs();
}
// 失能
void Disable()
{
mIsEnabled = false;
mLidarInfoList.clear();
mLineLaserInfoList.clear();
}
// 获取结果,右侧是否有墙面
bool IsWallLineRightSide(Pose2D carPose);
// 添加数据
void AddLidarData(ObservationScan2D &obs, Pose2D currentPose);
void AddLineLaserData(std::vector<Point3f> &points);
// 可视化检测结果分量
void VisualizeCheckResult(Pose2D carPose);
private:
// 可视化中间结果,segment和竖直方向结果;只是在segment有变动的时候更新
void VisualizeSegments();
// 可视化中间结果,竖直检测结果
void VisualizeLinelaserResult(Pose2D carPose);
CheckResult mLastaCheckResult; // 上一次的检测结果
CheckResult CurCheckResult; // 当前的检测结果
private:
// 记录历史数据, note 注意数据丢失的情况
// lidar
const float k_range_near_thresh = 0.6f; // 需要检测的距离范围
const float k_range_far_thresh = 1.2f;
const uint64_t k_lidar_detect_interval = 1000; // [ms]相邻两次检测lidar数据的时间间隔
const float k_dis_thresh = 0.1f; // [ms]相邻两次检测lidar数据的距离间隔
const size_t k_lidar_info_size_max = 8; // lidar历史数据序列长度最大值
const float k_collinear_angle_thresh = DEG2RAD(30); // 判断机器与segment平行的角度阈值
const float k_car_segment_othogonal_dis_thresh = 0.45f; // [m]投影落在线段上,且距离线段不超过0.45f
const float k_segment_collinear_angle_thresh = DEG2RAD(15); // 判断两条segment平行的角度阈值
const float k_segment_collinear_orthogonal_dis_thresh = 0.15f; // 判断两条segment平行的平行距离阈值
std::list<WallLineDetector::LidarDataInfo> mLidarInfoList; // lidar历史数据
// linelaser
const size_t k_linelaser_info_size_max = 3; // lidar历史数据序列长度最大值
std::list<WallLineDetector::LineLaserInfo> mLineLaserInfoList; // lineLaser历史数据
// 使能失能
bool mIsEnabled = false;
uint64_t mLastCheckTickMs = 0; // 上一次查询的时间戳
Pose2D mCheckPoseNoUse; // 查询时机器的位姿
// multiThread issue
std::mutex mDataMutex; // 多线程调用加锁
};
// 单例,墙面检测
#define WALL_LINE_DETECTOR Singleton<WallLineDetector>::Instance()#include "wall_line_detector.hpp"
#include "leg_detector/obstacle_extractor.h"
#include "local_zmap_linelaser.h"
#include <algorithm>
#include <vector>
// 获取结果,右侧是否有墙面
// 判断方法:右侧最近有长直线;右侧最近有竖直线;
bool WallLineDetector::IsWallLineRightSide(Pose2D carPose)
{
mCheckPoseNoUse = carPose;
// 多线程调用加锁
std::lock_guard<std::mutex> lg(mDataMutex);
//
if (mIsEnabled == false) {
// 忘了init容错
mIsEnabled = true;
mLastCheckTickMs = GetCurrentTickMs();
return false;
}
// 超过500ms没有调用,数据全部重置
if (GetCurrentTickMs() - mLastCheckTickMs > 500) {
Init();
return false;
}
mLastCheckTickMs = GetCurrentTickMs();
//
CurCheckResult.Reset();
// 判断 右侧最近有长直线,使用lidar数据
bool is_exist_horizon_line = false;
{
if (mLidarInfoList.size() < 3) {
return false; // 至少三次记录
}
std::vector<WallLineDetector::LidarDataInfo> mLidarInfoListCopy;
mLidarInfoListCopy.assign(mLidarInfoList.begin(), mLidarInfoList.end());
std::reverse(mLidarInfoListCopy.begin(), mLidarInfoListCopy.end()); // 把时间上最新的放到前面
// func:Segment起点建立坐标系
auto func_get_segment_refPose = [](std::pair<Pose2D, Pose2D> posePair) -> Pose2D {
Pose2D start = posePair.first;
Pose2D end = posePair.second;
float phi = WrapToPi(atan2(end.Y - start.Y, end.X - start.X));
start.SetPhi(phi);
return start;
};
// 判断一个segment与前后记录的segment是否重合平行
auto func_check_segment_steady_collinear_back_forth = [&](size_t i) -> bool {
if (i <= 0 || i + 1 >= mLidarInfoListCopy.size() || mLidarInfoListCopy.size() <= 3) {
return false; // 必须是中间的
}
WallLineDetector::LidarDataInfo curSegment_forth = mLidarInfoListCopy[i - 1]; // 时间戳更新的一个
WallLineDetector::LidarDataInfo curSegment = mLidarInfoListCopy[i];
WallLineDetector::LidarDataInfo curSegment_back = mLidarInfoListCopy[i + 1]; // 时间戳更旧的一个
// curSegment起点建立坐标系
Pose2D refPose = func_get_segment_refPose(curSegment.LineSegment);
//
Pose2D refPose_forth = func_get_segment_refPose(curSegment_forth.LineSegment);
Pose2D refPose_back = func_get_segment_refPose(curSegment_back.LineSegment);
// 判断方向平行, 前后都平行说明至少没有抖动
if (fabs(WrapToPi(refPose_forth.Phi() - refPose.Phi())) > k_segment_collinear_angle_thresh) {
return false;
}
if (fabs(WrapToPi(refPose_back.Phi() - refPose.Phi())) > k_segment_collinear_angle_thresh) {
return false;
}
// 判断平行距离
if (fabs((refPose_forth - refPose).Y) > k_segment_collinear_orthogonal_dis_thresh ||
fabs((refPose - refPose_back).Y) > k_segment_collinear_orthogonal_dis_thresh) {
return false;
}
return true; // 稳定的segment
};
// 判断是否右侧有lidar长直线段;判断标准:距离,平行度collinear,多次出现segment,
// carPose 是否在第i个稳定的segment左侧 平行
auto func_check_car_leftside_steady_segment = [&](size_t i) -> bool {
CurCheckResult.steadySegment = false;
CurCheckResult.carSegmentAngleOk = false;
CurCheckResult.carSegmentPosOk = false;
//
if (i <= 0 || i + 1 >= mLidarInfoListCopy.size() || mLidarInfoListCopy.size() <= 3) {
return false; // 必须是中间的
}
// 判断segment是否稳定 steadySegment
if (func_check_segment_steady_collinear_back_forth(i) == false) {
return false; // segment不稳定直接返回false
}
CurCheckResult.steadySegment = true;
// 可视化
// carPose 是否在第i个segment左侧 平行
{
Pose2D refPose = func_get_segment_refPose(mLidarInfoListCopy[i].LineSegment);
Pose2D end = mLidarInfoListCopy[i].LineSegment.second;
// 判断夹角 carSegmentAngleOk
if (fabs(WrapToPi(carPose.Phi() - refPose.Phi())) > k_collinear_angle_thresh) {
return false;
}
CurCheckResult.carSegmentAngleOk = true;
// 判断机器投影到refPose上的坐标
Pose2D car_to_segment = carPose - refPose; // 机器在segment起点坐标系下的位姿
// 投影落在线段上,且距离线段不超过0.45f
if (car_to_segment.X > 0.f && car_to_segment.X < refPose.GetDistance(end) &&
car_to_segment.Y > 0 && car_to_segment.Y < k_car_segment_othogonal_dis_thresh) {
// 可视化 水平直线段检测结果
CurCheckResult.carSegmentPosOk = true;
return true; // 在refPose左侧有效范围内
}
}
return false;
};
// 从最近一次检测的segment开始判断,机器与一条稳定的segment平行就返回true
for (size_t i = 1; i < mLidarInfoListCopy.size() - 1; i++) {
if (func_check_car_leftside_steady_segment(i) == true) {
// 有一条合适就认为是在lidar直墙边
is_exist_horizon_line = true;
break;
}
}
} // end // 判断 右侧最近有长直线,使用lidar数据
if (is_exist_horizon_line == false) {
// 可视化 水平直线段检测结果
return false; // 不是与稳定的segment平行
}
// mLineLaserInfoList 记录数目不够 返回false
if (mLineLaserInfoList.size() < k_linelaser_info_size_max) {
return false;
}
// mLineLaserInfoList 里面三次有一次是竖直的就认为有linelaser竖直墙
bool is_exist_vertical_line = false;
{
for (auto &item : mLineLaserInfoList) {
if (item.IsLineLaserRight_VerticalLine == true && GetCurrentTickMs() - item.TimeStampMs < 800) {
// 可视化 竖直检测结果
is_exist_vertical_line = true;
CurCheckResult.carVerticalOk = true;
break;
}
}
}
// 可视化 竖直检测结果
return is_exist_vertical_line;
}
/// @brief 更新当前的lidar数据,时间间隔或者距离间隔满足条件均可添加数据;检测直线段并记录,设置标志位;
/// @param obs lidar帧
/// @param currentPose 当前机器位姿
// todo/bug: 长时间没有segment加入需要删除过时数据,超时时长需要根据沿边速度计算;
void WallLineDetector::AddLidarData(ObservationScan2D &obs, Pose2D currentPose)
{
// 多线程调用加锁
std::lock_guard<std::mutex> lg(mDataMutex);
//
// 防止没有失能导致资源消耗
{
if (mIsEnabled == false) {
return;
}
if (GetCurrentTickMs() - mLastCheckTickMs > 500) {
mIsEnabled = false;
return;
}
}
// 判断是否需要添加
do {
if (mLidarInfoList.size() == 0) {
break; // 时间间隔满足要求
}
{
auto interval = obs.GetTimeStamp() / 1000 - mLidarInfoList.back().TimeStampMs;
if (interval > k_lidar_detect_interval) {
break; // 时间间隔满足要求, 这时应该是机器没有动或者长时间没有直线,因为k_dis_thresh比较小,会很快更新
}
if (currentPose.GetDistance(mLidarInfoList.back().CarPose) > k_dis_thresh) {
break; // 距离间隔满足要求
}
}
return; // 不添加
} while (0);
// // 需要检测的距离范围
// const float k_range_near_thresh = 0.6f;
// const float k_range_far_thresh = 1.2f;
// 只取机器右前方区域一定距离范围内的点;
ObservationScan2D obs_filtered;
int valid_count = 0;
{
const float *scan_data = obs.GetScanData();
const bool *scan_valid = obs.GetValidArray();
for (size_t i = 270; i < 360; i++) {
// 只考虑 k_range_raidus_use 距离范围内的点 && scanDataCopy[i] < k_range_raidus_use
if (scan_valid[i] && scan_data[i] > k_range_near_thresh && scan_data[i] < k_range_far_thresh) {
obs_filtered.SetScanData(i, scan_data[i]);
obs_filtered.SetValidArray(i, true);
valid_count++;
}
}
for (size_t i = 0; i < 30; i++) {
// 只考虑 k_range_raidus_use 距离范围内的点 && scanDataCopy[i] < k_range_raidus_use
if (scan_valid[i] && scan_data[i] > k_range_near_thresh && scan_data[i] < k_range_far_thresh) {
obs_filtered.SetScanData(i, scan_data[i]);
obs_filtered.SetValidArray(i, true);
valid_count++;
}
}
if (valid_count < 8) {
mLidarInfoList.clear(); // 右前方没有lidar点,直接清空
return; // lidar点太少, 无法检测,直接清空
}
}
// 检测直线
{
leg_detector::ObstacleExtractor SegExtractor;
SegExtractor.setMode(leg_detector::ObstacleExtractor::GET_LINE_SEG); // 设置为检测直线分割合并
SegExtractor.ProcessLidarData(currentPose, obs_filtered);
std::list<obstacle_detector::Segment> segments = SegExtractor.GetSegments(); // 提取出的线段
// SegExtractor.GetInputPoints().size();
// 判断并计算单条直线段
{
// 找到长度最长的segment
// obstacle_detector::Segment max_segment = *(std::max_element(segments.begin(), segments.end(),
// [](std::list<obstacle_detector::Segment>::iterator one, std::list<obstacle_detector::Segment>::iterator other) -> bool { return (*one).length() < (*other).length(); }));
obstacle_detector::Segment max_segment = *(std::max_element(segments.begin(), segments.end(),
[](obstacle_detector::Segment &one, obstacle_detector::Segment &other) -> bool { return (one).length() < (other).length(); }));
if (max_segment.length() < 0.3f) {
return; // 最长线段太短了
}
// 判断是否大多数点都在直线上
std::list<obstacle_detector::Point> points = SegExtractor.GetInputPoints();
// points.size();
// 记录离直线太远的点的个数;
int far_from_segment_point_count = 0;
for (auto &item : points) {
double dis = max_segment.distanceTo(item);
if (dis > 0.04) {
far_from_segment_point_count++;
// 离直线太远的点超过三个认为不是长直墙
if (far_from_segment_point_count > 3) {
return;
}
}
}
// 记录单直线
LidarDataInfo segmentInfo;
{
// segmentInfo.ExistLineSegment == true;
segmentInfo.TimeStampMs = obs.GetTimeStamp() / 1000;
segmentInfo.CarPose = currentPose;
// 线段的全局坐标,让线段朝向和机器一致
if (max_segment.first_point.x < max_segment.last_point.x) {
segmentInfo.LineSegment = std::make_pair(currentPose + Pose2D(max_segment.first_point.x, max_segment.first_point.y, 0),
currentPose + Pose2D(max_segment.last_point.x, max_segment.last_point.y, 0));
} else {
segmentInfo.LineSegment = std::make_pair(currentPose + Pose2D(max_segment.last_point.x, max_segment.last_point.y, 0),
currentPose + Pose2D(max_segment.first_point.x, max_segment.first_point.y, 0));
}
//
mLidarInfoList.push_back(segmentInfo);
if (mLidarInfoList.size() > k_lidar_info_size_max) {
mLidarInfoList.pop_front();
}
// 可视化
VisualizeSegments();
}
} // end 判断是否是单直线
}
}
/// @brief 更新当前的lineLaser数据(已经过滤高度和滤波之后的),记录右侧沿墙数据是否是竖直线;每一帧都做检测
/// @param points 右侧的linelaser数据
/// @param currentPose 当前机器位姿
void WallLineDetector::AddLineLaserData(std::vector<Point3f> &points)
{
// 多线程调用加锁
std::lock_guard<std::mutex> lg(mDataMutex);
//
// 防止没有失能导致资源消耗
{
if (mIsEnabled == false) {
return;
}
if (GetCurrentTickMs() - mLastCheckTickMs > 500) {
mIsEnabled = false;
return;
}
}
// 判断是否为竖直线,在yz平面内判断
//
// const float k_wash_board_heigth = 0.05f;
// 百分之八十的点在半径2cm范围内认为是竖直墙
// 判断y坐标,是否所有点都在2.5cm范围内
auto func_is_vertical = [&]() -> bool {
std::vector<float> y_list;
for (Point3f &item : points) {
if (item.z < 0.04f) {
continue;
}
y_list.push_back(item.y);
}
// 是否所有点都在2.5cm范围内
if (y_list.size() > 20 && *(std::max_element(y_list.begin(), y_list.end())) - *(std::min_element(y_list.begin(), y_list.end())) < 0.025f) {
return true;
}
// 有噪点的情形
// other 其他情况也认为是竖直墙,note : 对踢脚线墙面特殊处理
return false;
};
LineLaserInfo linelaserInfo;
linelaserInfo.IsLineLaserRight_VerticalLine = func_is_vertical();
linelaserInfo.TimeStampMs = GetCurrentTickMs();
mLineLaserInfoList.push_back(linelaserInfo);
//
if (mLineLaserInfoList.size() > k_linelaser_info_size_max) {
mLineLaserInfoList.pop_front();
}
// 可视化
VisualizeLinelaserResult(mCheckPoseNoUse);
}
void WallLineDetector::VisualizeSegments()
{
if (mLidarInfoList.empty()) {
return;
}
// mLidarInfoList
std::vector<WallLineDetector::LidarDataInfo> infolist;
infolist.assign(mLidarInfoList.begin(), mLidarInfoList.end());
//
graphics::G_LineSegments_Group lines;
// 计算每条射线的起点终点
for (size_t i = 0; i < infolist.size(); i++) {
graphics::G_Linesegment_Base segment;
Pose2D start = infolist[i].LineSegment.first;
Pose2D end = infolist[i].LineSegment.second;
segment.start.x = start.X;
segment.start.y = start.Y;
segment.end.x = end.X;
segment.end.y = end.Y;
lines.lineSegments.push_back(segment);
}
// 上传
lines.width = 3;
lines.color = graphics::COLOR_DARKGREY;
// VisualizationUtil::Instance()->SendCarPose(car_pose);
VisualizationUtil::Instance()->SendGraphicItem("mLidarInfoList", lines.GetBin());
{
graphics::G_Text text;
text.origin.x = infolist[0].LineSegment.first.X + 0.4f;
text.origin.y = infolist[0].LineSegment.first.Y + 0.4f;
text.text = std::string("segment size:") + std::to_string(mLidarInfoList.size());
text.width = 2;
text.color = graphics::COLOR_BLUE;
VisualizationUtil::Instance()->SendGraphicItem("mLidarInfoList_size", text.GetBin());
}
}
// 可视化中间结果,竖直检测结果
void WallLineDetector::VisualizeLinelaserResult(Pose2D carPose)
{
// mLineLaserInfoList
static bool lastResult = false;
bool is_exist_vertical_line = false;
{
for (auto &item : mLineLaserInfoList) {
if (item.IsLineLaserRight_VerticalLine == true && GetCurrentTickMs() - item.TimeStampMs < 800) {
// 可视化 竖直检测结果
is_exist_vertical_line = true;
break;
}
}
}
// visualize
auto func_show = [&]() -> void {
graphics::G_Text text;
text.origin.x = carPose.X + 0.4f;
text.origin.y = carPose.Y - 0.4f;
text.text = std::string("vertical_line:") + std::to_string((int)is_exist_vertical_line);
text.width = 2;
text.color = is_exist_vertical_line ? graphics::COLOR_BLUE : graphics::COLOR_RED;
VisualizationUtil::Instance()->SendGraphicItem("vertical_line", text.GetBin());
};
if (is_exist_vertical_line == lastResult) {
static uint64_t lastTick = GetCurrentTickMs();
if (GetCurrentTickMs() - lastTick < 200) {
return;
} else {
lastTick = GetCurrentTickMs(); // 检测结果无改变间隔时间上传
func_show();
}
}
func_show(); // 检测结果有改变一定上传
// 更新
lastResult = is_exist_vertical_line;
}
// 可视化检测结果分量
// todo: 将 线激光检测到的竖直线和lidar的segment做一个double check
void WallLineDetector::VisualizeCheckResult(Pose2D carPose)
{
// 判断两个状态是否没区别,有区别才上传
if (CurCheckResult == mLastaCheckResult) {
return;
}
// 可视化 , 使用文字的形式
std::string res = std::to_string(int(CurCheckResult.steadySegment)) + std::to_string(int(CurCheckResult.carSegmentAngleOk)) +
std::to_string(int(CurCheckResult.carSegmentPosOk)) + std::to_string(int(CurCheckResult.carVerticalOk));
{
graphics::G_Text text;
text.origin.x = carPose.X;
text.origin.y = carPose.Y;
text.text = std::string("wall_line_check:") + res;
text.width = 3;
text.color = CurCheckResult.IsAllOk() ? graphics::COLOR_BLUE : graphics::COLOR_RED;
VisualizationUtil::Instance()->SendGraphicItem("wall_line_check", text.GetBin());
}
// 更新
mLastaCheckResult = CurCheckResult;
}lidar点线段提取,使用iepf和split and merge(适用于周向有序排列的点提取和合并线段)
算法的其他用途:检测环境退化(两条平行线段)与非退化(存在成角度的多条长直线段,用于scan to map匹配获得准确的定位位姿,可以用于退化环境中消除odo累计误差)特征
另外一个应用:检测回环时候增加权重,增大信息矩阵,在检测到很强的非退化回环匹配的时候增加残差计算的权重)
另一个应用:在粒子滤波中,通过检测直线计算退化方向,据此决定重采样粒子分布;本质上,粒子总误差的协方差矩阵的主方向(最大特征值的特征向量)与退化方向平行;此时融合wheel odo位姿的时候相信odo在主方向上的投影分量;
void ObstacleExtractor::detectSegments(const PointSet &point_set)
{
std::cout << "detect segment now ,num points is: " << point_set.num_points << endl;
if (point_set.num_points < p_min_group_points_)
return;
Segment segment(*point_set.begin, *point_set.end); // Use Iterative End Point Fit
// if (p_use_split_and_merge_)
// segment = fitSegment(point_set);
PointIterator set_divider;
double max_distance = 0.0;
double distance = 0.0;
int split_index = 0; // Natural index of splitting point (counting from 1)
int point_index = 0; // Natural index of current point in the set
// Seek the point of division
// 离首尾直线段最远的作为分段点
for (PointIterator point = point_set.begin; point != point_set.end; ++point) {
++point_index;
if ((distance = segment.distanceTo(*point)) >= max_distance) {
// double r = (*point).length();
// todo:这里要对照论文调整,这里的值给的小一些提取的线段会更多;
// if (distance > p_max_split_distance_ + r * p_distance_proportion_) {
if (distance > 0.05) {
max_distance = distance;
set_divider = point;
split_index = point_index;
}
}
}
// Split the set only if the sub-groups are not 'small'
// 被分割的点集中点的个数不能少于3个 todo:可以调整
if (max_distance > 0.0 && split_index > p_min_group_points_ && split_index < point_set.num_points - p_min_group_points_) {
set_divider = input_points_.insert(set_divider, *set_divider); // Clone the dividing point for each group
PointSet subset1, subset2;
subset1.begin = point_set.begin;
subset1.end = set_divider;
subset1.num_points = split_index;
subset1.is_visible = point_set.is_visible;
subset2.begin = ++set_divider;
subset2.end = point_set.end;
subset2.num_points = point_set.num_points - split_index;
subset2.is_visible = point_set.is_visible;
detectSegments(subset1);
detectSegments(subset2);
} else { // Add the segment
if (!p_use_split_and_merge_) {
segment = fitSegment(point_set); // 使用最小二乘拟合直线
}
segments_.push_back(segment);
}
}
/**
* @brief 合并直线段,根据直线段间的法向距离或者真实距离
*
*/
void ObstacleExtractor::mergeSegments()
{
for (auto i = segments_.begin(); i != segments_.end(); ++i) {
for (auto j = i; j != segments_.end(); ++j) {
Segment merged_segment;
if (compareSegments(*i, *j, merged_segment)) {
auto temp_itr = segments_.insert(i, merged_segment);
segments_.erase(i);
segments_.erase(j);
i = --temp_itr; // Check the new segment against others
break;
}
}
}
}
bool ObstacleExtractor::compareSegments(const Segment &s1, const Segment &s2, Segment &merged_segment)
{
if (&s1 == &s2)
return false;
// Segments must be provided counter-clockwise
if (s1.first_point.cross(s2.first_point) < 0.0)
return compareSegments(s2, s1, merged_segment);
if (checkSegmentsProximity(s1, s2)) {
vector<PointSet> point_sets;
point_sets.insert(point_sets.end(), s1.point_sets.begin(), s1.point_sets.end());
point_sets.insert(point_sets.end(), s2.point_sets.begin(), s2.point_sets.end());
Segment segment = fitSegment2(point_sets);
if (checkSegmentsCollinearity(segment, s1, s2)) {
merged_segment = segment;
return true;
}
}
return false;
}
bool ObstacleExtractor::checkSegmentsProximity(const Segment &s1, const Segment &s2)
{
// return (s1.trueDistanceTo(s2.first_point) < p_max_merge_separation_ ||
// s1.trueDistanceTo(s2.last_point) < p_max_merge_separation_ ||
// s2.trueDistanceTo(s1.first_point) < p_max_merge_separation_ ||
// s2.trueDistanceTo(s1.last_point) < p_max_merge_separation_);
// todo: 这里的相邻点距离阈值要调整
return (s1.trueDistanceTo(s2.first_point) < 0.05 ||
s1.trueDistanceTo(s2.last_point) < 0.05 ||
s2.trueDistanceTo(s1.first_point) < 0.05 ||
s2.trueDistanceTo(s1.last_point) < 0.05);
}
bool ObstacleExtractor::checkSegmentsCollinearity(const Segment &segment, const Segment &s1, const Segment &s2)
{
return (segment.distanceTo(s1.first_point) < 0.05 &&
segment.distanceTo(s1.last_point) < 0.05 &&
segment.distanceTo(s2.first_point) < 0.05 &&
segment.distanceTo(s2.last_point) < 0.05);
}


















 687
687

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











