






视频讲解
全覆盖路径规划-弓字回字路径原理、开源项目解读、技巧、跑机效果-扫地机商用清洁_哔哩哔哩_bilibili全覆盖路径规划-弓字回字路径原理、开源项目解读、技巧、跑机效果-扫地机、商用清洁机器算法;笔记文档:https://www.yuque.com/tmjtyj/ni9h6a/bfi5643274ewvlbu, 视频播放量 3130、弹幕量 0、点赞数 107、投硬币枚数 59、收藏人数 344、转发人数 42, 视频作者 tmjtyj, 作者简介 持续输入,持续输出,相关视频:HybridAstar原理、改进、技巧、代码实现、开源项目推荐和解读、应用案例,路径规划matlab全集,ROS小车 SLAM+导航+全覆盖路径规划,花了8888买的path planning教程!收藏,速,扫地机弓形全覆盖算法,全覆盖路径规划——应用于扫地机器人(C++版本),MATLAB实现全覆盖路径规划算法,路径规划与轨迹跟踪系列算法学习_第1讲_Dijkstra算法,全中国搞路径规划的研究生都进来看!不仅对路径规划,我们也要对心规划!,【转载】将牛耕式全覆盖路径规划作为广义旅行商问题重新审视![]() https://www.bilibili.com/video/BV11H4y1B7PM/?spm_id_from=333.999.0.0【视频note】全覆盖路径规划-弓字/回字路径原理、开源项目解读、技巧、跑机效果-扫地机/商用清洁 · 语雀
https://www.bilibili.com/video/BV11H4y1B7PM/?spm_id_from=333.999.0.0【视频note】全覆盖路径规划-弓字/回字路径原理、开源项目解读、技巧、跑机效果-扫地机/商用清洁 · 语雀
1. 示例
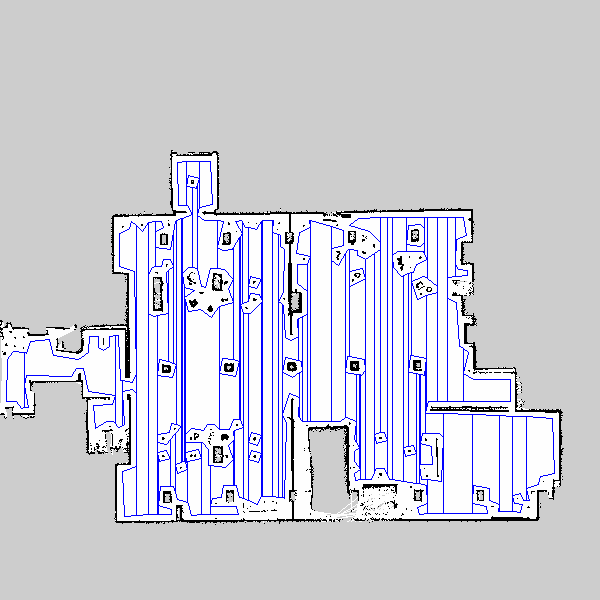
弓字全覆盖示例(扫地机)

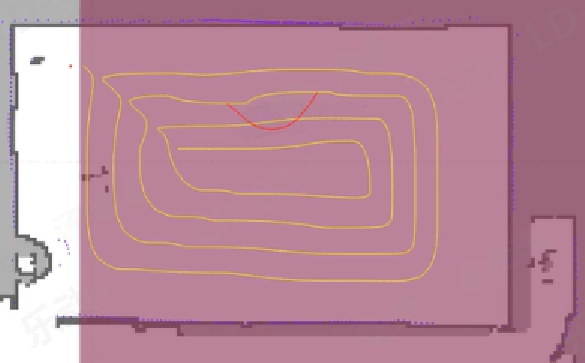
回字全覆盖示例(商用清洁)
2. 弓字路径规划
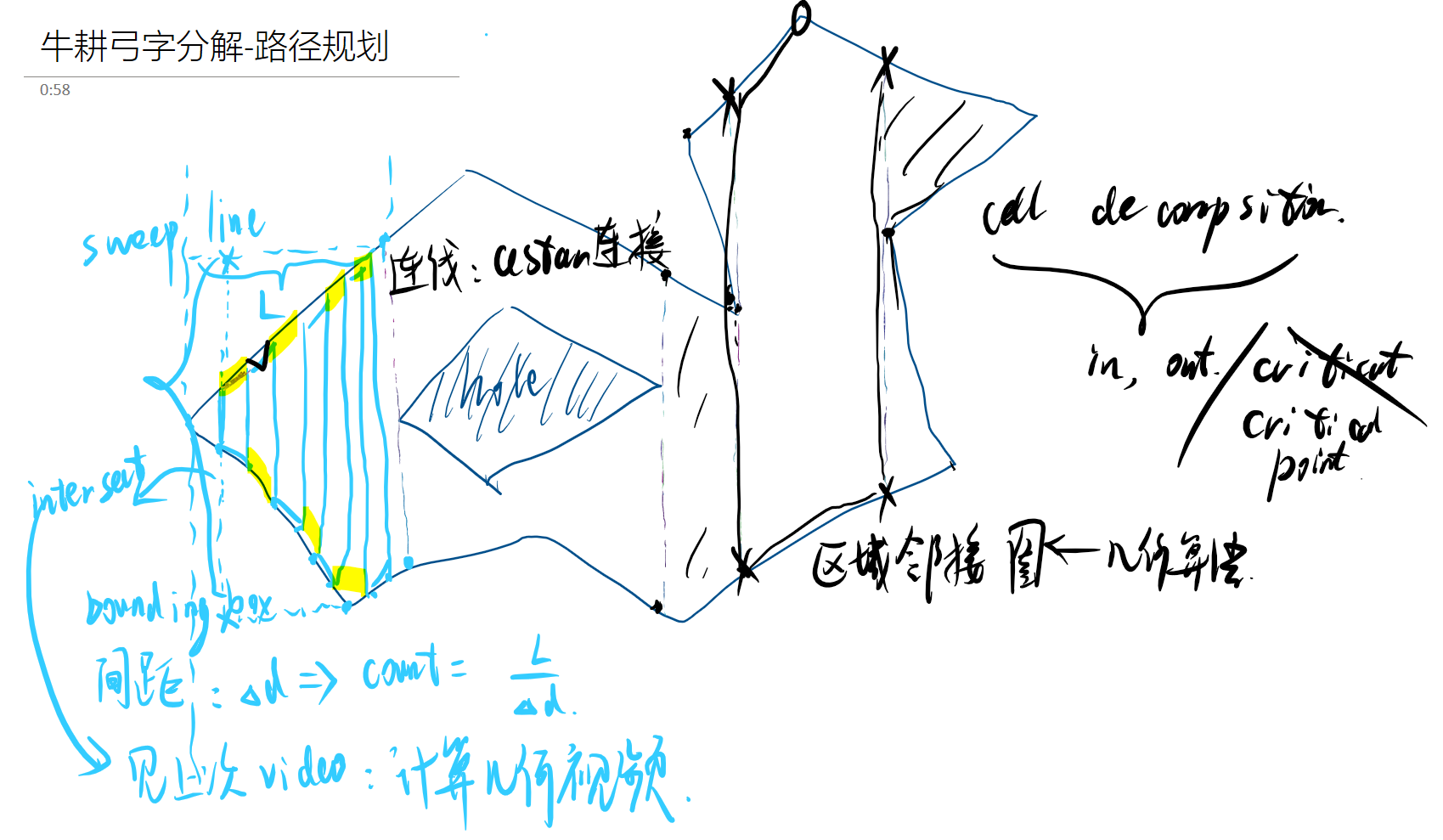
2.1. 原理
E:\[openFromGit]\Chap6-CellDecomp_howie(牛耕法原理).pdf
📎Chap6-CellDecomp_howie(牛耕法原理).pdf
牛耕弓字路径;
单调多边形;
牛耕区域的特点;
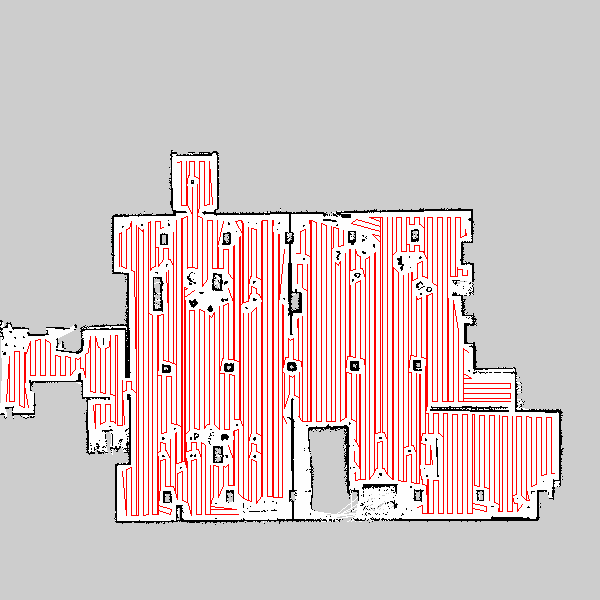
Boustrophedon cell decomposition
【【UIUC CS598】【计算拓扑学】001 Introduction, Jordan polygon theorem-哔哩哔哩】 【UIUC CS598】【计算拓扑学】001 Introduction, Jordan polygon theorem_哔哩哔哩_bilibili
2.1.1. 轮廓区域处理、轮廓树
pri_轮廓区域处理、轮廓树
对融合地图的轮廓查找和处理;
找到机器所在连通域的顶级轮廓和次级轮廓(孔洞),在进行牛耕分解;
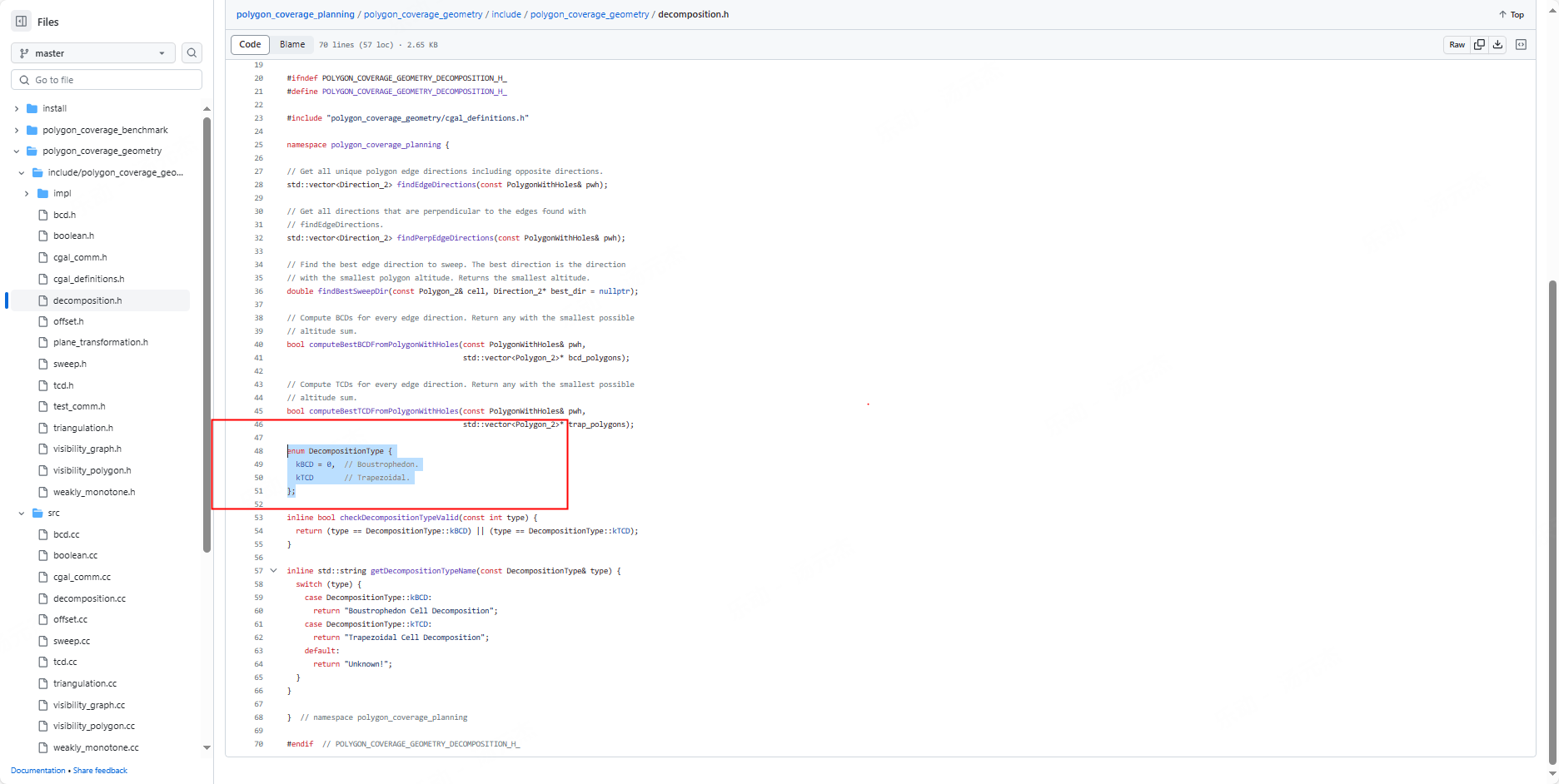
2.1.2. 多边形的分解-开源项目推荐
TCD :trapezoid cell decomposition梯形分解
BCD:boustrophedon cell decomposition牛耕分解
几何算法:cgal有实现;
下面这个文件里面有提到这两种分解的方法实现;
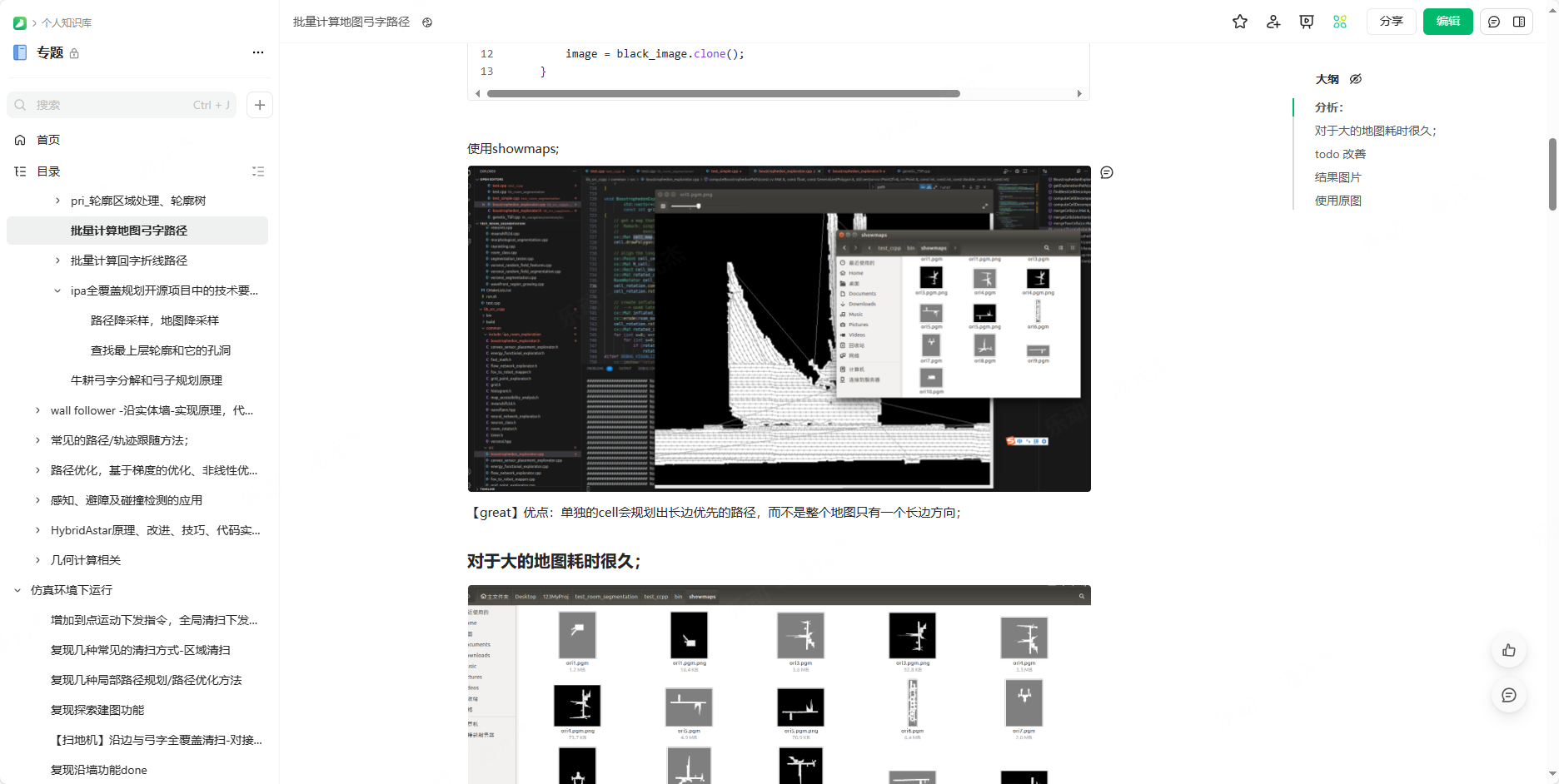
2.2. 开源项目推荐
D:\[openFromGit]\CoveragePlanner-master
这个repo使用了cgal的几何算法;
ipa coverage path planning;
CCPP(complete coverage path planning)全覆盖路径规划;
ECPP(edge coverage path planning)边缘覆盖路径规划;(沿边,清洁,割草机);
使用比较多的,ros package;
原理和实现步骤同上;
3. 回字折线路径规划
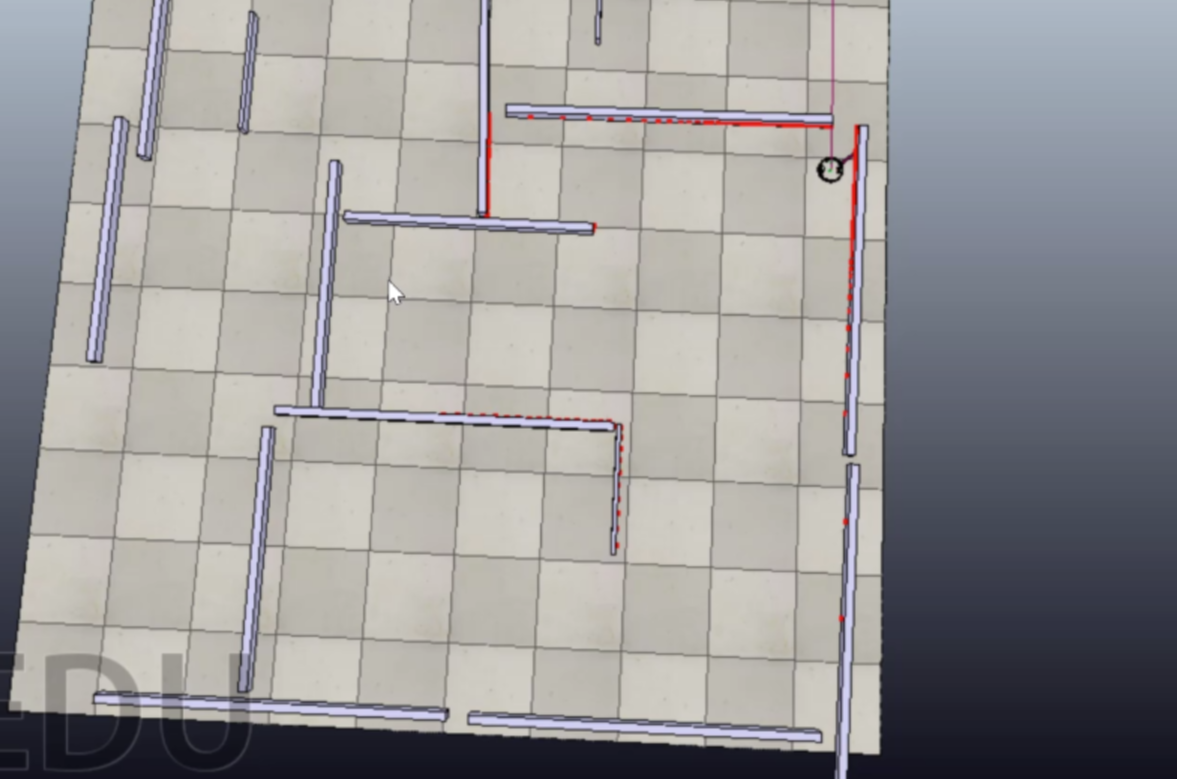
3.1. 八点法边缘路径搜索
实现方法,参考xju _robot,对应有b站视频;
GitHub - Mr-Tony921/xju-robot: xju robot project for algorithm teaching.
实现步骤:
根据路径间距对地图做降采样;
改进:
对地图做分区;最好是凸分解;
void GetSpiral(cv::Mat neural_mat_, int start_x, int start_y, double angle, const char *name, cv::Mat &mapdata)
{
std::vector<CellIndex> indexed_path;
CellIndex init_point, next_point, cur_point;
using dir_t = std::tuple<int, int, int>;
std::vector<dir_t> directs{
std::make_tuple(0, 0, 1),
std::make_tuple(1, -1, 1),
std::make_tuple(2, -1, 0),
std::make_tuple(3, -1, -1),
std::make_tuple(4, 0, -1),
std::make_tuple(5, 1, -1),
std::make_tuple(6, 1, 0),
std::make_tuple(7, 1, 1)};
// 初始点选择
init_point.row = start_y;
init_point.col = start_x;
//
init_point.theta = angle;
indexed_path.emplace_back(init_point);
cur_point = init_point;
auto current_theta = static_cast<int>(init_point.theta / 45);
//
while (1)
{
neural_mat_.at<uint8_t>(cur_point.row, cur_point.col) = 0;
auto rotate_dist = std::distance(directs.begin(),
std::find_if(directs.begin(), directs.end(),
[&](dir_t const &a)
{
return current_theta == std::get<0>(a);
})) -
static_cast<int>(directs.size() / 2);
rotate_dist = (rotate_dist + static_cast<int>(directs.size())) % static_cast<int>(directs.size());
std::rotate(directs.begin(), directs.begin() + rotate_dist, directs.end());
auto find_near = false;
for (auto const &dir : directs)
{
auto r = cur_point.row + std::get<1>(dir);
auto c = cur_point.col + std::get<2>(dir);
if (std::max(0, r) == std::min(r, neural_mat_.rows - 1) &&
std::max(0, c) == std::min(c, neural_mat_.cols - 1) &&
neural_mat_.at<uint8_t>(r, c) > 0)
{
find_near = true;
next_point.row = r;
next_point.col = c;
next_point.theta = std::get<0>(dir) * 45;
indexed_path.emplace_back(next_point);
cur_point = next_point;
current_theta = std::get<0>(dir);
break;
}
}
if (find_near)
continue;
// float min_dist = FLT_MAX;
// float dist;
// int ii = 0;
// int min_index = -1;
// for (auto const& fs : free_space_) {
// if (neural_mat_.at<float>(fs.row, fs.col) > 0) {
// dist = static_cast<float>((cur_point.row - fs.row) * (cur_point.row - fs.row)
// + (cur_point.col - fs.col) * (cur_point.col - fs.col));
// if (dist < min_dist) {
// min_dist = dist;
// min_index = ii;
// }
// }
// ++ii;
// }
//
bool find_min_cell = false;
int min_dist = neural_mat_.rows * neural_mat_.rows + neural_mat_.cols * neural_mat_.cols;
// int min_index = -1;
CellIndex min_cell;
{
for (int i = 0; i < neural_mat_.rows; i++)
{
for (int j = 0; j < neural_mat_.cols; j++)
{
if (neural_mat_.at<uint8_t>(i, j) > 0)
{
auto dist = static_cast<int>((cur_point.row - i) * (cur_point.row - i) + (cur_point.col - j) * (cur_point.col - j));
if (dist < min_dist)
{
find_min_cell = true;
min_dist = dist;
min_cell.col = j;
min_cell.row = i;
}
}
}
}
}
if (find_min_cell == false)
{
// ROS_WARN("The program has gone through %lu steps", indexed_path.size());
std::cout << "The program has gone through" << indexed_path.size() << "steps" << std::endl;
break;
}
next_point = min_cell;
next_point.theta = atan2(next_point.col - cur_point.col, next_point.row - cur_point.row) / M_PI * 180;
if (next_point.theta < 0)
{
next_point.theta = 360 + next_point.theta;
}
// ROS_DEBUG_STREAM("next point index: " << min_index << " "
// << "distance: " << std::sqrt(min_dist));
// ROS_DEBUG_STREAM("current point: " << cur_point.row << ", " << cur_point.col);
// ROS_DEBUG_STREAM("next point: " << next_point.row << ", " << next_point.col);
cur_point = next_point;
indexed_path.emplace_back(next_point);
current_theta = 4;
}
// show path
{
{
// 过滤indexed_path;
}
// 生成随机数
RNG rng(time(0));
using namespace cv;
// 显示一下
// Mat trace_edge = Mat::zeros(neural_mat_.rows, neural_mat_.cols, CV_8UC1);
Mat trace_edge = neural_mat_.clone();
cv::imwrite("path_spiral_original.png", trace_edge);
Mat trace_edge_color;
cvtColor(trace_edge, trace_edge_color, cv::COLOR_GRAY2BGR);
// 扩大四倍
cv::resize(trace_edge_color, trace_edge_color, cv::Size(trace_edge_color.cols * 4, trace_edge_color.rows * 4), 0, 0, 1);
uint8_t color_increase = 0;
int dir = 1;
CellIndex last_index = indexed_path.front();
uint32_t index_num = 0;
for (auto &item : indexed_path)
{
index_num++;
//
if (color_increase + dir > (int)255)
{
dir = -dir;
}
else if (color_increase + dir < (int)0)
{
dir = -dir;
}
color_increase = color_increase + dir;
// Scalar color = Scalar(rng.uniform(0, 255 + color_increase), rng.uniform(0, 255), rng.uniform(0, 255));
Scalar color = Scalar(color_increase, 255 - color_increase * 0.8, color_increase * 0.9);
// trace_edge_color.at<Vec3b>( item.row*4, item.col*4)[0] = color[0];
// trace_edge_color.at<Vec3b>(item.row*4, item.col*4)[1] = color[1];
// trace_edge_color.at<Vec3b>(item.row*4, item.col*4)[2] = color[2];
cv::line(trace_edge_color, cv::Point(item.col * 4, item.row * 4), cv::Point(last_index.col * 4, last_index.row * 4), color);
{
// auto pic_show = trace_edge_color.clone();
// cv::resize(pic_show, pic_show, cv::Size(trace_edge_color.cols * 4, trace_edge_color.rows * 4), 0, 0, 1);
// imshow("path_spiral_colored", trace_edge_color);
}
last_index = item;
// cv::waitKey(2);
}
{
std::string savename(name);
savename = savename + std::string("-spiral.png");
cv::imwrite(savename.c_str(), trace_edge_color);
imshow("path_spiral_colored", trace_edge_color);
}
// cv::imwrite("path_spiral_colored.png", trace_edge_color);
}
// show path
}

3.2. 改进,凸分解
4. 回字曲线路径规划
4.1. 使用回字折线加bezier曲线平滑
对外边缘不能保证无碰撞;
改进:
先沿墙;
将bezier控制点取密集;
4.2. 使用contourline
对白色区域腐蚀,提轮廓



















 2973
2973

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











