







无约束
之前梯度类算法中介绍的最速下降法、牛顿法和拟牛顿法,可以直接使用的条件之一为:决策变量都是无约束的。
用数学语言描述的话,可以表达为:决策变量为
x
=
(
x
1
,
x
2
,
⋅
⋅
⋅
,
x
n
)
\pmb x=(x_1,x_2,···,x_n)
x=(x1,x2,⋅⋅⋅,xn),目标函数为
m
i
n
f
(
x
)
min f(\pmb x)
minf(x)
但在实际问题中,大部分都是包含约束的,比如多个决策变量之间存在耦合关系、资源有上限等。其中,有些是等式约束,有些则是不等式约束。在求解这类包含约束的最优化问题时,就需要一些新的方法。本文主要介绍拉格朗日乘子法和KKT条件。
等式约束
当最优化问题中只包含等式约束时,数学模型可以表达为
m
i
n
f
(
x
)
s.t.
h
l
(
x
)
=
0
,
l
=
1
,
2
,
.
.
.
,
L
min f(\pmb x) \\ \text{s.t.} \quad h_l(\pmb x) = 0, l=1,2,...,L
minf(x)s.t.hl(x)=0,l=1,2,...,L
相比无约束的情况,多了
h
l
(
x
)
=
0
h_l(\pmb x) = 0
hl(x)=0的限制。
求解这类问题的思路是,想办法将等式约束去掉,将原问题转化为无约束优化问题,这样就可以使用梯度类算法求解了。
拉格朗日乘子法是很常用的一种转化方法,该方法是构造如下的优化问题:
m
i
n
L
(
x
,
λ
)
minL(\pmb x, \pmb \lambda)
minL(x,λ)
其中
L
(
x
,
λ
)
=
f
(
x
)
+
∑
l
=
1
L
λ
l
h
l
(
x
)
L(\pmb x, \pmb \lambda)=f(\pmb x)+\sum_{l=1}^L\lambda_lh_l(\pmb x)
L(x,λ)=f(x)+l=1∑Lλlhl(x)
相比原优化问题,新优化问题是无约束的,但是多了一组优化变量
λ
\pmb \lambda
λ。看起来,两者是有些差异的,那么它们的最优解是否相同呢?答案是相同的,接下来详细解释一下。
针对
L
(
x
,
λ
)
L(\pmb x, \pmb \lambda)
L(x,λ),求一阶导数,并令其等于0:
∂
L
∂
x
i
=
0
⇒
∂
f
∂
x
i
+
∑
l
=
1
L
λ
l
∂
h
l
∂
x
i
=
0
∂
L
∂
λ
l
=
0
⇒
h
l
=
0
\frac{\partial L}{\partial x_i}=0 \Rightarrow \frac{\partial f}{\partial x_i}+\sum_{l=1}^L\lambda_l\frac{\partial h_l}{\partial x_i}=0 \\ \frac{\partial L}{\partial \lambda_l}=0 \Rightarrow h_l=0 \\
∂xi∂L=0⇒∂xi∂f+l=1∑Lλl∂xi∂hl=0∂λl∂L=0⇒hl=0
上述两式即为
L
(
x
,
λ
)
L(\pmb x, \pmb \lambda)
L(x,λ)取极值的必要条件。第一个公式暂时不需要关心,主要看第二个公式
h
l
=
0
h_l=0
hl=0。也就是说,假设存在一组
(
x
∗
,
λ
∗
)
(\pmb x^\ast, \pmb \lambda^\ast)
(x∗,λ∗)使得
L
(
x
,
λ
)
L(\pmb x, \pmb \lambda)
L(x,λ)取到极值点,那么必然有
h
l
(
x
∗
)
=
0
h_l(\pmb x^\ast) = 0
hl(x∗)=0
即等式约束已经被满足。此时
L
(
x
∗
,
λ
∗
)
=
f
(
x
∗
)
L(\pmb x^\ast, \pmb \lambda^\ast)=f(\pmb x^\ast)
L(x∗,λ∗)=f(x∗)
即最优解也等价。
虽然已经证明了,但好像依然挺绕的。接下来再画一个二维最优化问题的示意图,直观理解一下。
如下图所示。蓝色曲线为约束条件,所以可行解只能在该曲线上。3条黑色圈为原目标函数
f
(
x
,
y
)
f(x,y)
f(x,y)的等高线,其值从外向内越来越小,分别为5、3和1。蓝色曲线和黑色等高线存在3种空间关系,分别是不相交、相交和相切。针对不相交的情况(图中C点),显然
h
(
x
,
y
)
≠
0
h(x,y)\neq0
h(x,y)=0,所以是不可行解;针对相交的情况(图中B点),从相交点开始,沿着等高线降低方向寻找,必然存在更优解;针对相切的情况(图中A点),则恰好为最优解。
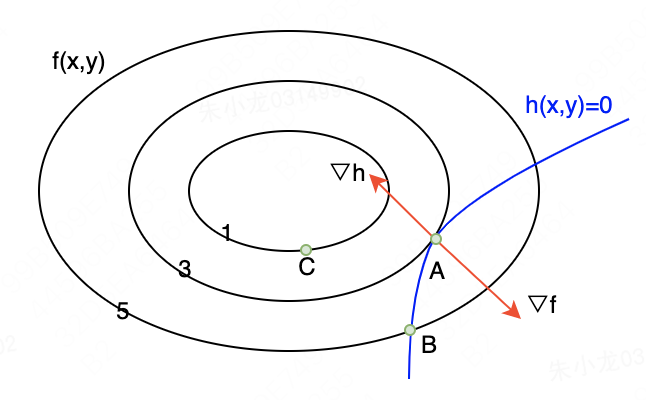
现在来看一下相切点处的特征。首先是 h ( x , y ) = 0 h(x,y)=0 h(x,y)=0,即 L ( x , λ ) L(\pmb x, \pmb \lambda) L(x,λ)取极值的第二个必要条件,自必不多说;其次是由于相切, f ( x , y ) f(x,y) f(x,y)和 h ( x , y ) h(x,y) h(x,y)的法向量共线,即梯度共线,由此可以推导出 L ( x , λ ) L(\pmb x, \pmb \lambda) L(x,λ)取极值的第一个必要条件。所以,原问题和新问题是完全等价的。
这里还需要额外说的一点是:图中 Δ f \Delta f Δf的方向肯定是向外的,因为梯度的定义表明了其是指向 f f f变大方向的;但是 Δ h \Delta h Δh的方向是不明确的,因为我们只有 h ( x , y ) = 0 h(x,y)=0 h(x,y)=0的信息,并不清楚朝哪个方向能让 h ( x , y ) h(x,y) h(x,y)变大,所以图中只是一个示意图。
不等式约束
如果最优化问题中不仅包含等式约束,还包含不等式约束,数学模型可以表达为
m
i
n
f
(
x
)
s.t.
h
l
(
x
)
=
0
,
l
=
1
,
2
,
.
.
.
,
L
g
m
(
x
)
≤
0
,
m
=
1
,
2
,
.
.
.
,
M
min f(\pmb x) \\ \text{s.t.} \ \qquad h_l(\pmb x) = 0, l=1,2,...,L \\ \qquad \qquad g_m(\pmb x) ≤ 0, m=1,2,...,M
minf(x)s.t. hl(x)=0,l=1,2,...,Lgm(x)≤0,m=1,2,...,M
求解该类问题的思路也很简单:先将不等式约束 g ( x ) g(\pmb x) g(x)转化为等式约束,然后再按照第二节中介绍的拉格朗日乘子法继续求解。
将不等式约束变为等式约束的方式是增加松弛变量
w
m
2
w_m^2
wm2:
g
m
(
x
)
+
w
m
2
=
0
,
m
=
1
,
2
,
.
.
.
,
M
g_m(\pmb x)+w_m^2=0, m=1,2,...,M
gm(x)+wm2=0,m=1,2,...,M
至此,可以构造新的拉格朗日函数:
L
(
x
,
λ
,
w
)
=
f
(
x
)
+
∑
l
=
1
L
λ
l
h
l
(
x
)
+
∑
m
=
1
M
λ
L
+
m
[
g
m
(
x
)
+
w
m
2
]
L(\pmb x,\pmb \lambda, \pmb w)=f(\pmb x)+\sum_{l=1}^L\lambda_lh_l(\pmb x)+\sum_{m=1}^M\lambda_{L+m}[g_m(\pmb x)+w_m^2]
L(x,λ,w)=f(x)+l=1∑Lλlhl(x)+m=1∑MλL+m[gm(x)+wm2]
求一阶导数,可以得到最优解的必要条件如下:
∂
L
∂
x
i
=
0
⇒
∂
f
∂
x
i
+
∑
l
=
1
L
λ
l
∂
h
l
∂
x
i
+
∑
m
=
1
L
λ
L
+
m
∂
g
m
∂
x
i
=
0
∂
L
∂
λ
l
=
0
⇒
h
l
=
0
,
g
m
+
w
m
2
=
0
∂
L
∂
w
m
=
0
⇒
2
λ
L
+
m
w
m
=
0
\frac{\partial L}{\partial x_i}=0 \Rightarrow \frac{\partial f}{\partial x_i}+\sum_{l=1}^L\lambda_l\frac{\partial h_l}{\partial x_i}+\sum_{m=1}^L\lambda_{L+m}\frac{\partial g_m}{\partial x_i}=0 \\ \frac{\partial L}{\partial \lambda_l}=0 \Rightarrow h_l=0,g_m+w_m^2=0 \\ \frac{\partial L}{\partial w_m}=0 \Rightarrow 2\lambda_{L+m}w_m=0 \\
∂xi∂L=0⇒∂xi∂f+l=1∑Lλl∂xi∂hl+m=1∑LλL+m∂xi∂gm=0∂λl∂L=0⇒hl=0,gm+wm2=0∂wm∂L=0⇒2λL+mwm=0
KKT条件
事实上,针对包含不等式约束的情况,除了先转化为等式约束再使用拉格朗日乘子法这种“曲线救国”的方法,还有更直接的求解方法,那就是KKT条件。
针对上述同时包含等式和不等式约束的最优化问题,KKT条件为
∂
f
∂
x
i
+
∑
l
=
1
L
λ
l
∂
h
l
∂
x
i
+
∑
m
=
1
L
λ
L
+
m
∂
g
m
∂
x
i
=
0
h
l
=
0
,
g
m
≤
0
λ
L
+
m
g
m
=
0
λ
L
+
m
≥
0
\frac{\partial f}{\partial x_i}+\sum_{l=1}^L\lambda_l\frac{\partial h_l}{\partial x_i}+\sum_{m=1}^L\lambda_{L+m}\frac{\partial g_m}{\partial x_i}=0 \\ h_l=0,g_m≤0 \\ \lambda_{L+m}g_m=0 \\ \lambda_{L+m}≥0 \\
∂xi∂f+l=1∑Lλl∂xi∂hl+m=1∑LλL+m∂xi∂gm=0hl=0,gm≤0λL+mgm=0λL+m≥0
需要注意的有三点:
(1)相比上一节转化的拉格朗日乘子法,KKT中新增了约束
λ
L
+
m
≥
0
\lambda_{L+m}≥0
λL+m≥0;
(2)相比KKT条件,拉格朗日乘子法中新增了变量
w
\pmb w
w;
(3)拉格朗日乘子法中的
λ
L
+
m
w
m
=
0
\lambda_{L+m}w_m=0
λL+mwm=0和KKT条件中的
λ
L
+
m
g
m
=
0
\lambda_{L+m}g_m=0
λL+mgm=0是等价的。
接下来理解一下KKT条件。
假设
x
∗
\pmb x^\ast
x∗为原问题的最优解。针对
g
(
x
∗
)
g(\pmb x^\ast)
g(x∗),存在两种可能性:
(1)
g
(
x
∗
)
<
0
g(\pmb x^\ast)<0
g(x∗)<0。此时该约束没起到作用,可以直接去掉,问题退化为第二节的等式约束问题,此时
λ
L
+
m
=
0
\lambda_{L+m}=0
λL+m=0即可。
(2)
g
(
x
∗
)
=
0
g(\pmb x^\ast)=0
g(x∗)=0。此时该约束相当于新的等式约束,把第二节中的二维最优化图再搬运过来看一下。到了这里后,我们发现,
f
(
x
,
y
)
f(x,y)
f(x,y)和
g
(
x
,
y
)
g(x,y)
g(x,y)的法向量不仅要共线,而且方向还一定要恰好相反,即
g
(
x
,
y
)
<
0
g(x,y)<0
g(x,y)<0必然在右侧。这是因为如果
g
(
x
,
y
)
<
0
g(x,y)<0
g(x,y)<0在左侧,则C点满足不等式约束,且目标函数值比A点更优,与
g
(
x
∗
)
=
0
g(\pmb x^\ast)=0
g(x∗)=0矛盾。
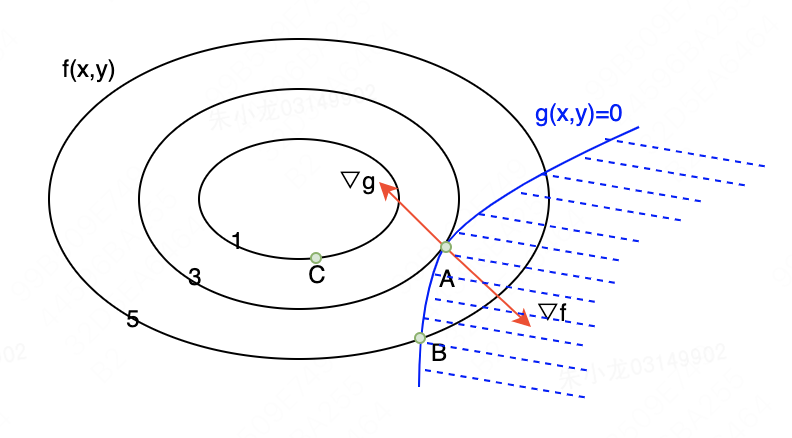
综上可以推导出:
λ
L
+
m
g
m
=
0
\lambda_{L+m}g_m=0
λL+mgm=0和
λ
L
+
m
≥
0
\lambda_{L+m}≥0
λL+m≥0。














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









