







更多优质内容,请关注公众号:智驾机器人技术前线
1.论文信息
-
标题:Point Tree Transformer for Point Cloud Registration
-
作者:Meiling Wang, Guangyan Chen, Yi Yang, Li Yuan, Yufeng Yue
-
文章链接:https://arxiv.org/abs/2406.17530
2.摘要
点云配准是计算机视觉和机器人学领域的一个基本任务。基于变换器的方法在这一领域最近的发展已经展示了增强的性能。然而,这些方法中使用的标准注意力机制通常整合了许多低相关性点,因此在优先考虑其注意力权重在稀疏但有意义的点上存在困难。这种低效率导致了有限的局部结构建模能力和二次计算复杂性。为了克服这些限制,我们提出了点树变换器(PTT),这是一种新颖的基于变换器的点云配准方法,它在保持线性计算复杂性的同时高效地提取全面的局部和全局特征。PTT以从粗糙到密集的方式从点云构建层次化特征树,并引入了一种新颖的点树注意力(PTA)机制,该机制遵循树结构以促进关注区域向显著点的逐步收敛。具体来说,每层树选择性地识别具有最高注意力分数的一组关键点。后续层将注意力集中在从选定点集的子点派生出的显著相关区域。特征提取过程还结合了粗略点特征,这些特征捕获了高层次的语义信息,从而促进了局部结构建模和多尺度信息的逐步整合。因此,PTA使模型能够专注于关键的局部结构并派生出详细的局部信息,同时保持线性计算复杂性。我们在3DMatch、ModelNet40和KITTI数据集上进行的广泛实验表明,我们的方法在性能上超越了最先进的方法。
3.主要贡献
-
PTT是通过将树状结构集成到Transformer模型中提出的,允许模型提取丰富的局部特征,并在学到的注意力区域中实现线性计算复杂性;
-
PTA的提出以层次化和动态地指定高相关性的关键点,并沿着树状结构组织点云,这有助于局部结构建模和多尺度信息聚合;
-
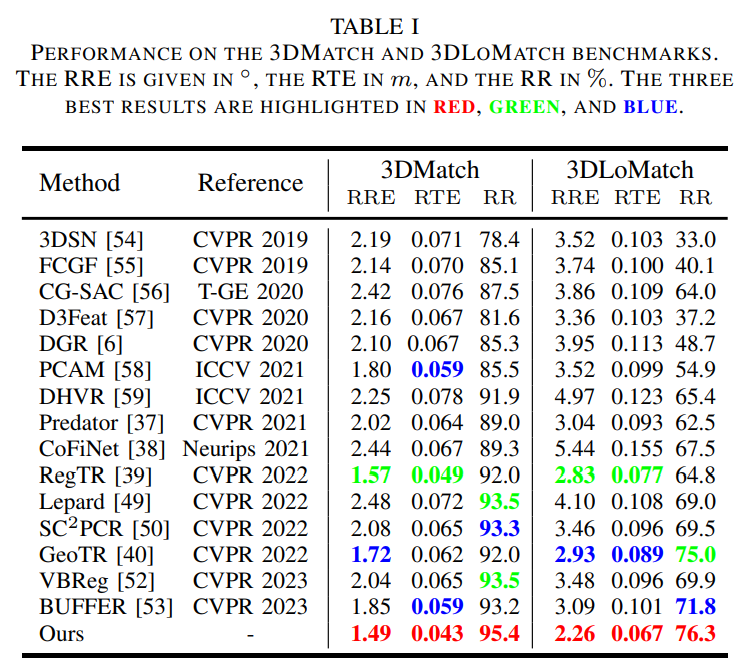
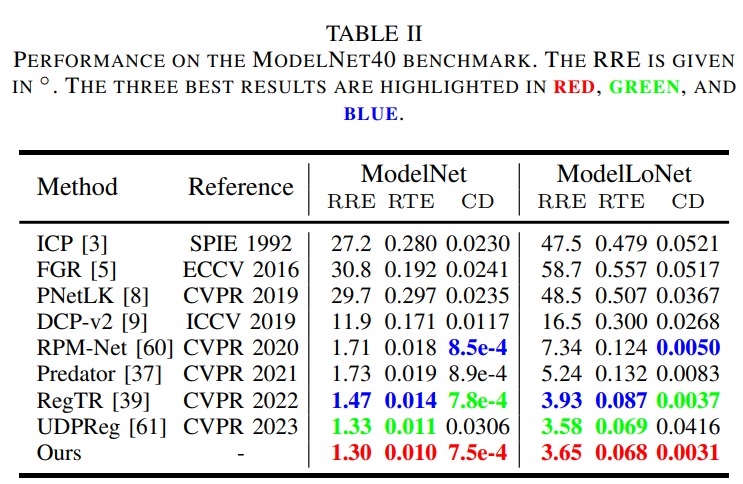
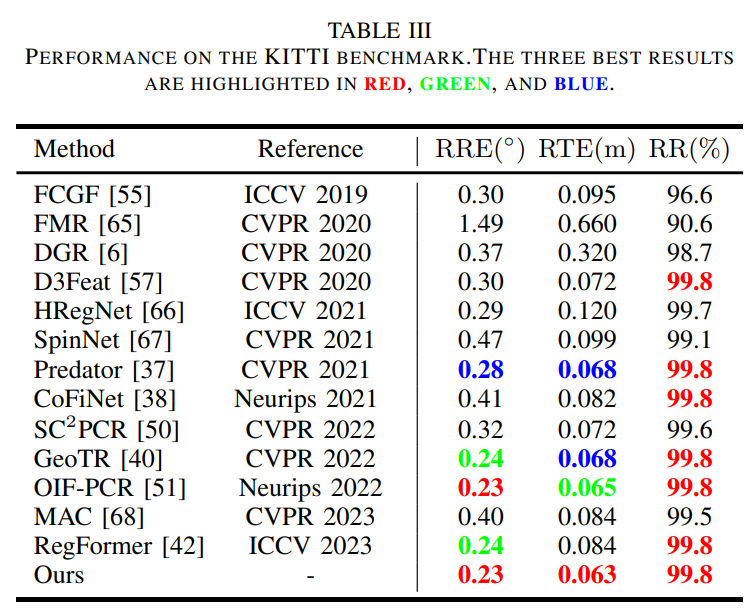
广泛的实验表明,我们的方法优于baselines,并在3DMatch、ModelNet40和KITTI数据集上实现了最先进的性能。
4.核心思想与方法
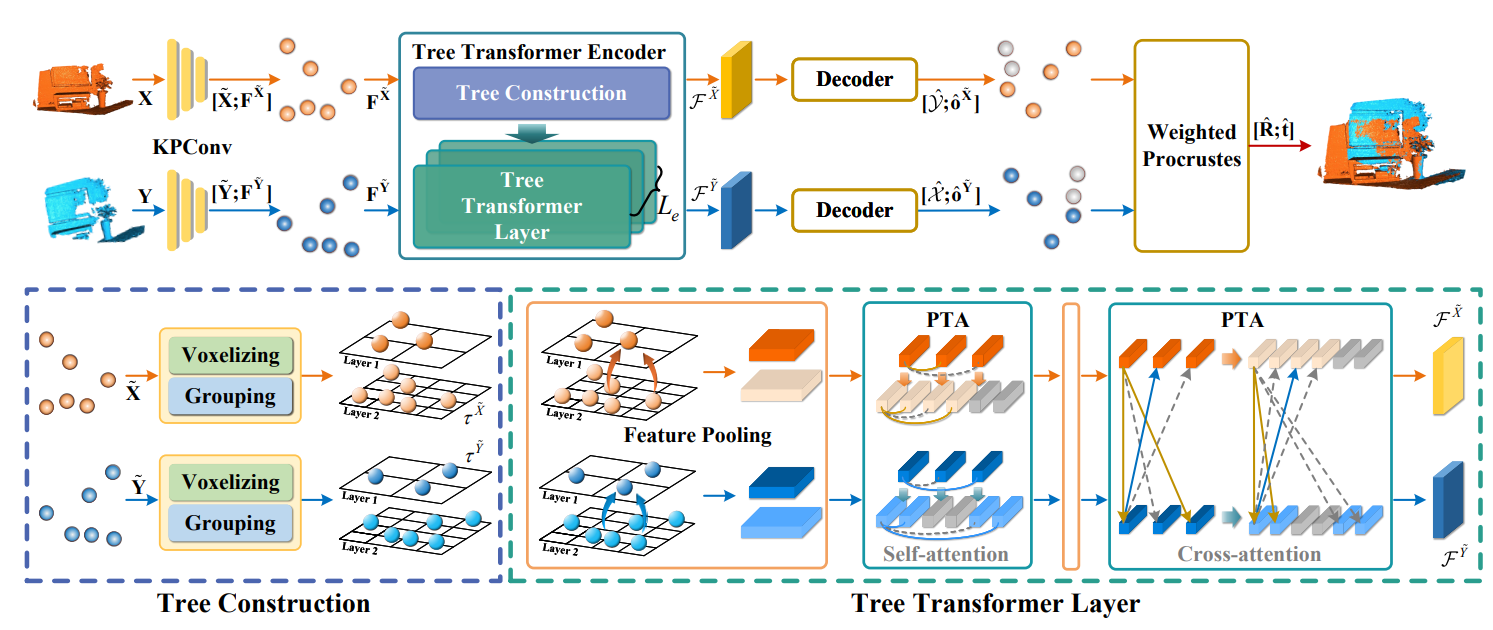
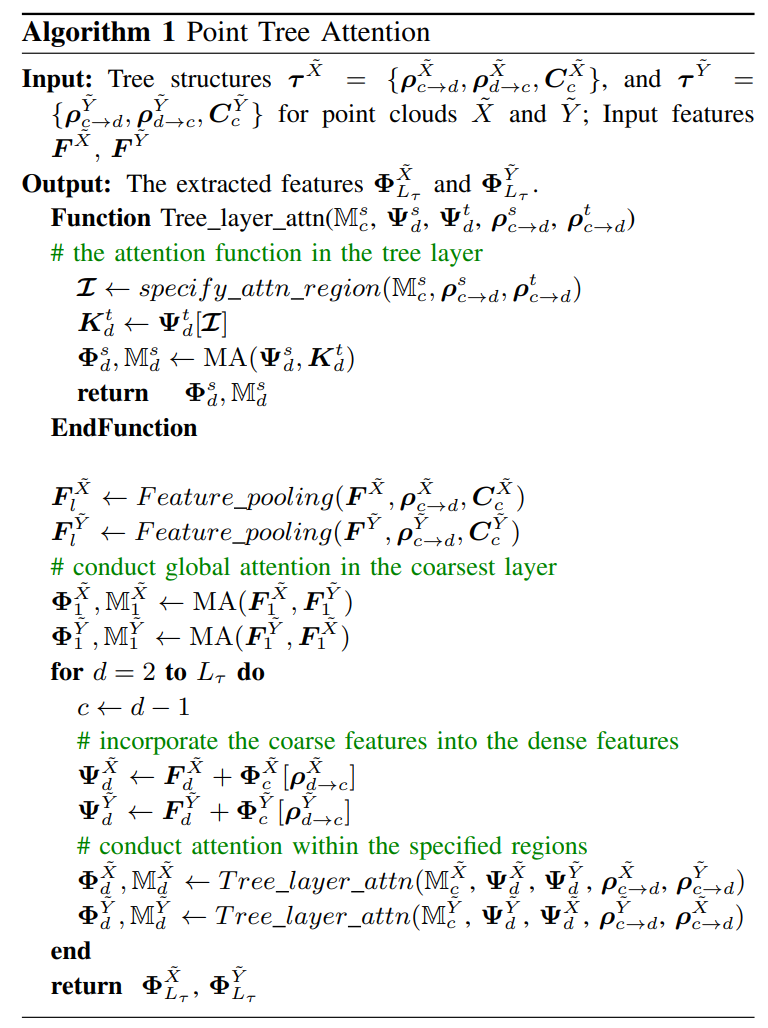
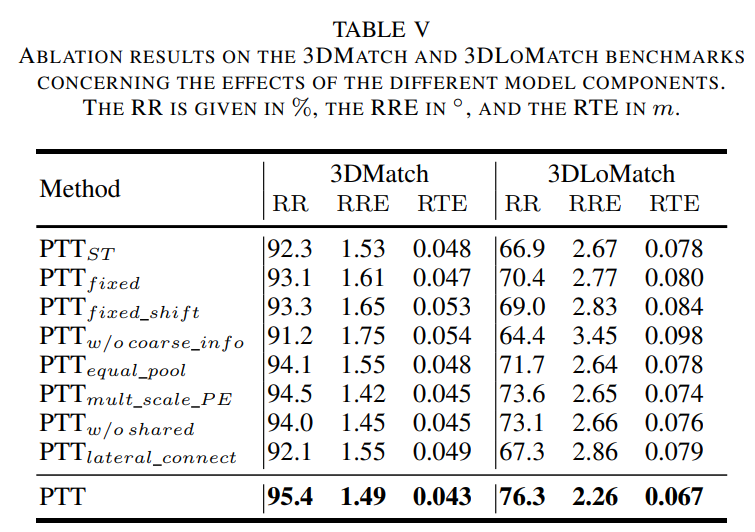
本文提出了一种名为Point Tree Transformer(PTT)的新型变换器(Transformer)方法,用于点云配准任务。PTT通过构建层次化的点云特征树,并引入了一种新颖的点树注意力(Point Tree Attention, PTA)机制,以树状结构指导注意力区域的逐步收敛,从而高效地提取局部和全局特征,同时保持线性计算复杂度。PTA机制能够在每个树层级选择性地识别具有最高注意力分数的关键点,并在后续层级中将注意力集中在从选定点集派生的子点上,这样不仅增强了对稀疏但有意义的点的注意力权重分配能力,而且通过动态调整注意力的稀疏性,提高了局部结构建模的能力,并实现了多尺度信息的渐进式整合。
本文的主要流程可以概括如下:首先,KPConv提取稀疏点集的特征。随后,树变换器编码器构建特征树,并迭代地提取包含局部和全局信息的特征。然后,解码器预测相应的点云和重叠分数。最后,计算变换以对齐点云。
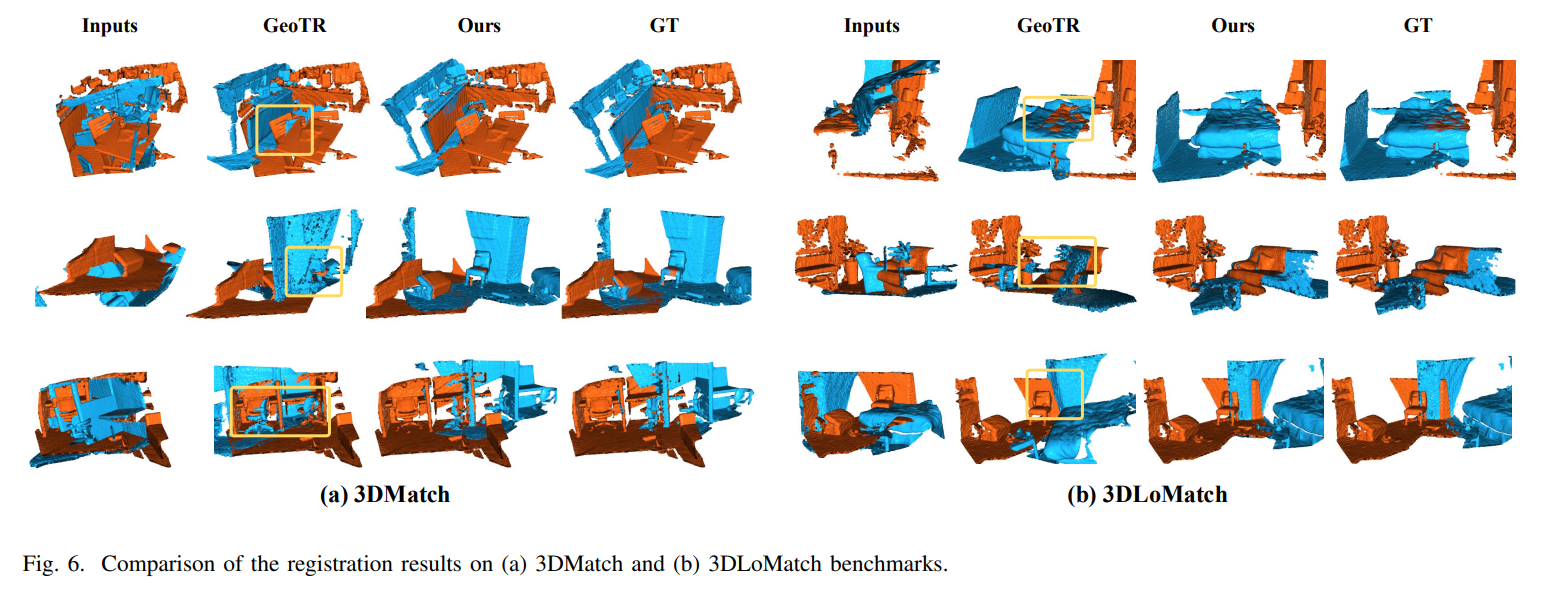
5.实验验证
6.总结
在这项工作中,提出了一种名为PTT(Point Tree Transformer)的新型基于Transformer的网络。这种方法能够在保持线性计算复杂度的同时,提取丰富的局部和全局信息。PTT构建了从粗糙到密集的特征树,并且提出了PTA(Point Tree Attention)模块,该模块遵循树结构来逐步缩小被关注区域,并结构化点云。具体来说,粗糙层根据其注意力分数自适应地指定密集层中的被关注区域,并且提取的粗糙特征被整合到密集层中以指导特征提取过程,从而使我们的方法能够专注于重要的局部结构,并促进局部特征的提取。重要的是,学习到的注意力稀疏性使得PTA可以用于自注意力和交叉注意力。在3DMatch、ModelNet40和KITTI数据集上进行的广泛实验表明,PTT达到了最先进的性能水平。
本文仅做学术分享,如有侵权,请联系删文!
更多优质内容,请关注公众号:智驾机器人技术前线















 587
587

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









