






 本文详细介绍了增量平滑和映射(iSAM)算法的第一版,即iSAM1,它将SLAM问题转化为非线性最小二乘问题并利用QR分解求解。通过线性化过程模型和测量模型,将非线性最小二乘问题转换为标准形式,然后应用QR分解来求解,从而避免了Cholesky分解的矩阵条件数问题。这种方法有效地解决了机器人轨迹和地图估计的问题。
本文详细介绍了增量平滑和映射(iSAM)算法的第一版,即iSAM1,它将SLAM问题转化为非线性最小二乘问题并利用QR分解求解。通过线性化过程模型和测量模型,将非线性最小二乘问题转换为标准形式,然后应用QR分解来求解,从而避免了Cholesky分解的矩阵条件数问题。这种方法有效地解决了机器人轨迹和地图估计的问题。
iSAM1论文链接
一.基于QR分解的增量平滑优化
A.一个SLAM的概率图模型
用下图的网络表示SLAM问题:
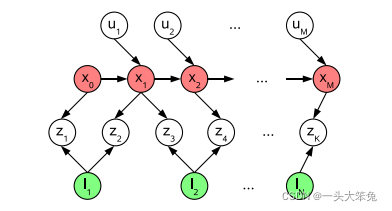
其中, 是机器人在时刻i的状态,
是地标j的位置,
是时刻i的控制输入,
是第k个地标测量。
所有变量和测量值的联合概率由以下公式表示:

其中是初始状态上的先验值,
是运动学模型,由控制输入ui参数化,
是地标性测量模型。这里假设每个测量值
都有已知的对应关系
。
假设为高斯测量模型。则“过程模型”如下:

该方程描述了测程传感器或扫描匹配的过程,其中是正态分布的零均值过程噪声与协方差矩阵
。
而高斯测量模型如下:

对机器人的地标传感器进行建模,其中是正态分布的零均值测量噪声与协方差
。
B.把SLAM化为最小二乘问题
当执行平滑而不是滤波操作时,注意的是给定控制输入u和地标测量值z时,整个轨迹x和地标l的地图估计。轨迹和映射的映射估计,
是通过最小化来自(1)的联合概率的负对数得到的:

结合过程和测量模型,则有以下非线性最小二乘问题:
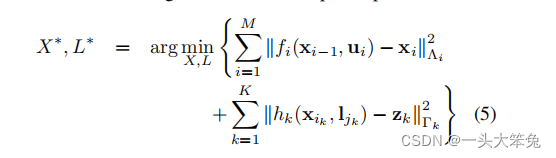
其中,这里使用符号代替平方马氏距离与协方差矩阵Σ
这里附录回顾了如何将测量函数线性化,并将非线性最小二乘目标函数(5)的所有分量收集成一个一般的最小二乘公式,遵循。通过泰勒展开式将(5)中的测量函数线性化,假设要么有一个很好的线性化点可用,或者正在进行一个非线性优化方法的一次迭代。在以上任何一种情况下,(5)中过程模型的一阶线性化给出为:
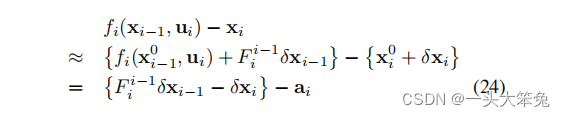
其中,是过程模型
在线性化点
处的雅可比矩阵,这里定义为:

并且,是测程预测误差(注意这里的ui是给出的,因此是常数)。而方程(5)中测量模型的一阶线性化如下:
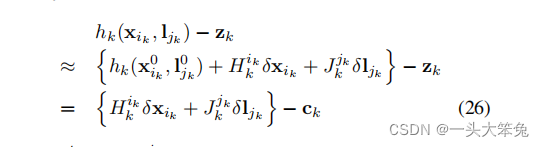
这里,和
分别是测量函数
关于在线性化点
上计算的
和
变化的雅可比矩阵:
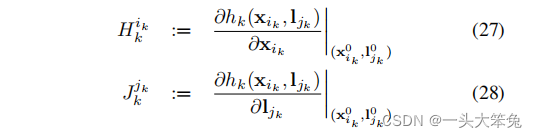
并且 是测量预测误差。
分别使用线性化过程和测量模型(24)和(26),则非线性最小二乘问题(5)变成:

也就是说,这里得到了δθ中一个需要有效求解的线性最小二乘问题。为了避免以一种特殊的方式处理,我们引入了矩阵
,
通过简单地改变变量,可以去掉协方差矩阵和
。用
作为Λ的矩阵平方根,可以将马氏范数重写如下:

也就是说,总是可以通过将每个项中的、
和
预乘来从(29)中消除Λi,同样从测量项中消除
。对于标量测量,这仅仅意味着将每一项除以测量的标准差。下面假设已经这样做了,然后去掉马氏符号:
最后,将雅可比矩阵收集到一个大矩阵A,将向量和
收集到一个右侧向量b,得到以下标准最小二乘问题:

为了简单起见,iSAM在附录之外去掉了δ·符号,则上式变成:

其中,向量θ∈包含所有的姿态和地标变量,矩阵A∈
是一个大但稀疏的测量雅可比矩阵,b∈
是右侧(RHS)向量。
通过将导数设为0,将该稀疏最小二乘系统转化为普通的线性方程组,得到所谓的正规方程
。该方程系统可以用
的 Cholesky 分解来求解。
C.用QR分解法求解
将标准QR矩阵分解应用于测量雅可比矩阵A来求解最小二乘问题(6)。与Cholesky分解相比,这避免了必须用矩阵条件数的相关平方来计算信息矩阵。测量值雅可比矩阵A的QR分解得到:
其中,R∈为上三角平方根信息矩阵(注意,信息矩阵由
给出),Q∈
为正交矩阵。我们将这个因子分解应用于最小二乘问题(6):
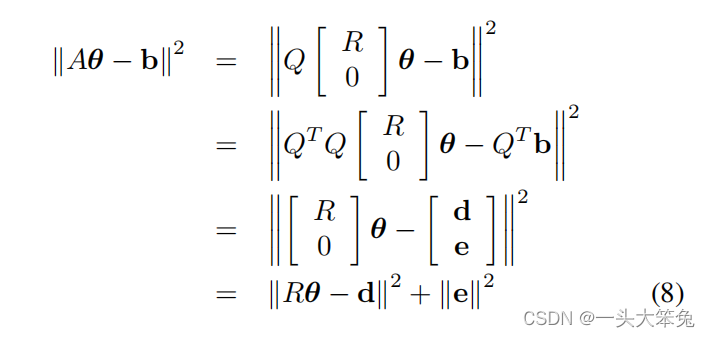
其中,定义与d∈
和e∈
.(8)当且仅当Rθ=d时成为最小,留下第二项
作为最小二乘问题的残差。因此,QR分解将最小二乘问题简化为具有单一唯一解
的线性系统:

求解这个方程组的大部分工作已经通过QR分解完成了,因为R是上三角的,所以可以使用简单的反替换。结果是基于所有测量条件的完整机器人轨迹和地图的最小二乘估计。

















 1340
1340

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









