






一、安装ROS
1.添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
2.添加密钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
3.安装ROS
sudo apt update
sudo apt-get install ros-melodic-desktop-full
4.初始化rosdep
sudo rosdep init
rosdep update
二、运行ROS案例——小海龟
 需要注意的是,需要打开三个终端,小海龟的运行路径是在最后一个终端上,通过上下左右按键控制的。
需要注意的是,需要打开三个终端,小海龟的运行路径是在最后一个终端上,通过上下左右按键控制的。
三、使用话题查看器查看两个node之间的消息传递

四、ROS通信编程
ROS通信编程
1.创建工作空间
mkdir -p ~/catkin_ws/src#创建文件夹
cd ~/catkin_ws/src#进入目录
catkin_init_workspace#初始化,使其成为ROS的工作空间
2.编译工作空间
cd ..
catkin_make
3.设置环境变量
source /home/lyy/catkin_ws/devel/setup.bash#该环境变量设置只对当前终端有效,lyy是用户名
#将上面命令放置到~/.bashrc文件中,让其对所有终端都有效
sudo nano ~/.bashrc
4.检查环境变量
echo $ROS_PACKAGE_PATH
5.创建功能包
cd ~/catkin_ws/src
catkin_create_pkg learning_communication std_msgs rospy roscpp
6.编译功能包
cd ~/catkin_ws
catkin_make
7.编辑两个cpp程序
talk.cpp
#include<sstream>
#include"ros/ros.h"
#include"std_msgs/String.h"
int main(int argc,char **argv)
{
//ROS节点初始化
ros::init(argc,argv,"talker");
//创建节点句柄
ros::NodeHandle n;
//创建一个Publisher,发布名为chatter的topic,消息类型为std_msgs::String
ros::Publisher chatter_pub=n.advertise<std_msgs::String>("chatter",1000);
//设置循环的频率
ros::Rate loop_rate(10);
int count=0;
while(ros::ok())
{
//初始化std_msgs::String类型的消息
std_msgs::String msg;
std::stringstream ss;
ss<<"hello world"<<count;
msg.data=ss.str();
//发布消息
ROS_INFO("%s",msg.data.c_str());
chatter_pub.publish(msg);
//循环等待回调函数
ros::spinOnce();
//接受循环频率延时
loop_rate.sleep();
++count;
}
return 0;
}
 listener.cpp
listener.cpp
#include"ros/ros.h"
#include"std_msgs/String.h"
//接收到订阅的消息,会进入消息的回调函数
void chatterCallback(const std_msgs::String::ConstPtr& msg)
{
//将接收到的消息打印处理
ROS_INFO("I heard:{%s}",msg->data.c_str());
}
int main(int argc,char **argv)
{
//初始化ROS节点
ros::init(argc,argv,"listener");
//创建节点句柄
ros::NodeHandle n;
//创建一个Subscriber,订阅名为chatter的topic,注册回调函数chatterCallback
ros::Subscriber sub=n.subscribe("chatter",1000,chatterCallback);
//循环等待回调函数
ros::spin();
return 0;
}

设置CMakeLists.txt文件
 生成可执行文件并运行
生成可执行文件并运行

五、用C++或python写一个程序,控制小海龟走一个圆形
新建画圆程序名为yuan.cpp
touch yuan.cpp
编写代码
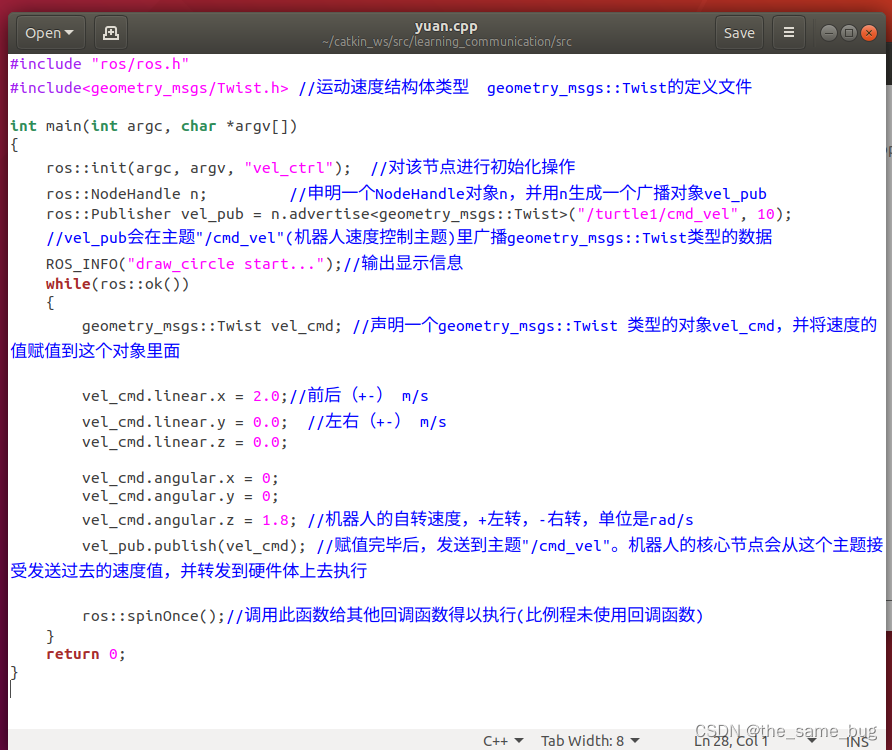
#include "ros/ros.h"
#include<geometry_msgs/Twist.h> //运动速度结构体类型 geometry_msgs::Twist的定义文件
int main(int argc, char *argv[])
{
ros::init(argc, argv, "vel_ctrl"); //对该节点进行初始化操作
ros::NodeHandle n; //申明一个NodeHandle对象n,并用n生成一个广播对象vel_pub
ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
//vel_pub会在主题"/cmd_vel"(机器人速度控制主题)里广播geometry_msgs::Twist类型的数据
ROS_INFO("draw_circle start...");//输出显示信息
while(ros::ok())
{
geometry_msgs::Twist vel_cmd; //声明一个geometry_msgs::Twist 类型的对象vel_cmd,并将速度的值赋值到这个对象里面
vel_cmd.linear.x = 2.0;//前后(+-) m/s
vel_cmd.linear.y = 0.0; //左右(+-) m/s
vel_cmd.linear.z = 0.0;
vel_cmd.angular.x = 0;
vel_cmd.angular.y = 0;
vel_cmd.angular.z = 1.8; //机器人的自转速度,+左转,-右转,单位是rad/s
vel_pub.publish(vel_cmd); //赋值完毕后,发送到主题"/cmd_vel"。机器人的核心节点会从这个主题接受发送过去的速度值,并转发到硬件体上去执行
ros::spinOnce();//调用此函数给其他回调函数得以执行(比例程未使用回调函数)
}
return 0;
}

在CMakeLists.txt文件中找到##Declare a C++ executable,在这一行的前面添加以下内容
add_executable(yuan src/yuan.cpp)
target_link_libraries(yuan ${catkin_LIBRARIES})
 运行程序
运行程序
创建三个终端,先运行ros,再运行小海龟案例,运行画圆程序
















 3826
3826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









