






1. 先确定为什么要进行Normalzation?
进行数据归一化,其实就是对数据进行无量纲化处理,使得不同维度(不同量纲)的数据具有可比性。比如人的身高体重,175cm和60kg,是不能直接比较或者相加的,单位的不同会导致计算结果的不同,尺度大(数值大)的特征会起决定性作用,而尺度小(数值小)的特征其作用可能会被忽略,为了消除特征间单位和尺度差异的影响,以对每维特征同等看待,需要对特征进行归一化。
2. 各归一化方法在什么背景下提出,适合什么样的场景?
训练深层网络时,由于批次的不断传入和训练,DNN内部参数在不断改变,导致每一次隐藏层的输入分布不一致,这不符合机器学习中的独立同分布假设(independent and identically distributed, IID)。也就是在训练过程中,隐层的输入分布老是变来变去,这就产生了内部协变量偏移问题(Internal Covariate Shift, ICS)。
Batch Normalization
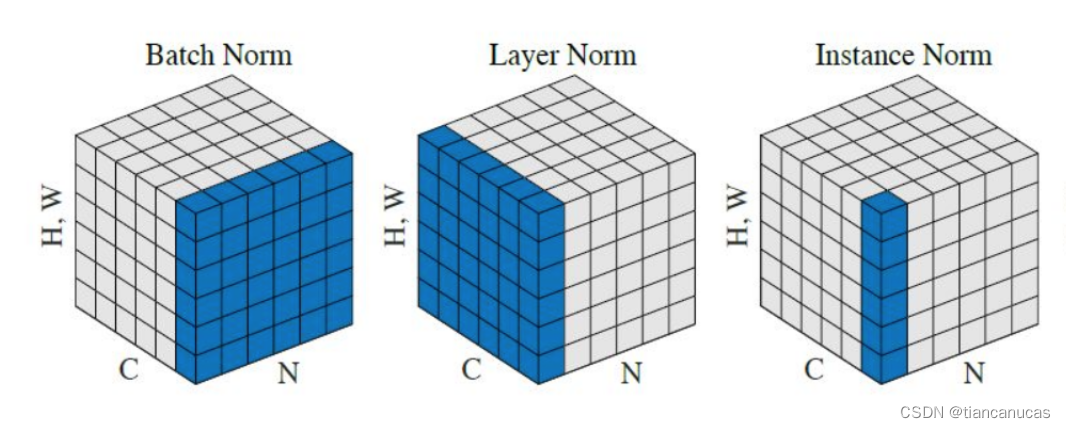
批归一化(Batch Normalization, BN)的提出就是解决ICS问题的,BN在batch上,对N、H、W做归一化,而保留通道 C 的维度。BN天然与batch size有关,batch size太小bn的效果不会太好,并且BN对于图像那样的固定尺寸的输入有效,对RNN这种输入时序列形式的网络效果不好,因为在类似图像中归一化的对象(同一个channel)大概率服从相似分布,而RNN归一化的对象(文本中同一位置出现的字或词)就很难服从相似分布了,所以就很难得到合适的均值和方差,将来自不同分布的特征做变换,不仅效果不好,甚至带来反作用。BN可以加速模型收敛,解决梯度弥散问题,且具有一定的正则化效果,一般用了BN的网络,就不需要再用Dropout等其他正则化方法了。
Layer Normalization
如果我们将一批文本组成一个batch,那么BN的操作方向是,对每句话的第一个词进行操作。但语言文本的复杂性是很高的,任何一个词都有可能放在初始位置,且词序可能并不影响我们对句子的理解。而BN是针对每个位置进行缩放,这不符合NLP的规律,所以就提出了层归一化(Layer Normalization, LN),LN则是针对一句话进行缩放的,且LN一般用在第三维度,如[batchsize, seq_len, dims]中的dims,一般为词向量的维度,或者是RNN的输出维度等等,这一维度各个特征的量纲应该相同。因此也不会遇到上面因为特征的量纲不同而导致的缩放问题。
Instance Normalization
BN注重对batchsize数据归一化,但是在图像风格化任务中,生成的风格结果主要依赖于某个图像实例,所以对整个batchsize数据进行归一化是不合适的,因而提出了实例正则化(Instance Normalization, IN)。IN保留了N、C的维度,只在Channel内部对于H和W进行求均值和标准差的操作。IN适用于生成模型中,比如图片风格迁移。因为图片生成的结果主要依赖于某个图像实例,所以对整个Batch进行Normalization操作并不适合图像风格化的任务,在风格迁移中适用IN不仅可以加速模型收敛,并且可以保持每个图像实例之间的独立性。IN的计算就是把每个HW单独拿出来归一化处理,不受通道和batch_size 的影响如果特征图可以用到通道之间的相关性,那么就不建议使用它做归一化处理。
3. Transformer主要结构及主要处理哪一类任务?
Transformer的提出对哪个方向或哪种模型的冲击最大,不错,NLP或者说对RNN结构模型造成毁灭性打击,因为从发展来看,其有全面取代RNN(LSTM)类模型的趋势。那么回到1和2,一方面我们需要解决Transformer中的数据分布不一致问题,又因为其属于类RNN结构,顺理成章的就首当其冲的选择Layer Normalization咯。
不过,任何方法的选择都是结果说话,只要效果好,为啥选它,原理在哪,留给各位学者慢慢研究挖掘,有可能设计者并没想那么多,只是尝试出真知罢了。


















 1151
1151

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









