






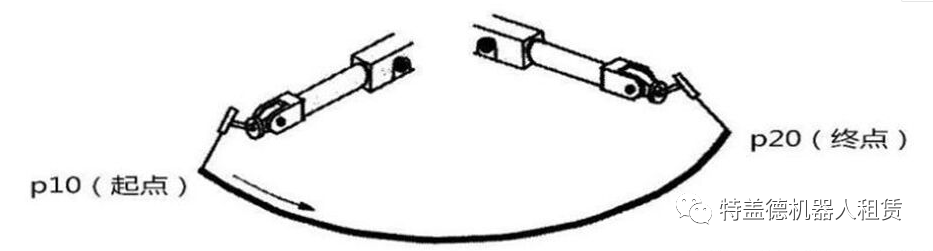
MoveJ:关节运动指令,示教位置点的数据类型为robtarget。将机器人的TCP点快速运动到给定目标点,运行轨迹不一定是直线,一般不存在奇异点。如:机器人以最快捷的方式运动至目标点,其运动状态不完全可控,但运动路径保持唯一,MoveJ指令常用于机器人在空间大范围移动。
总结:
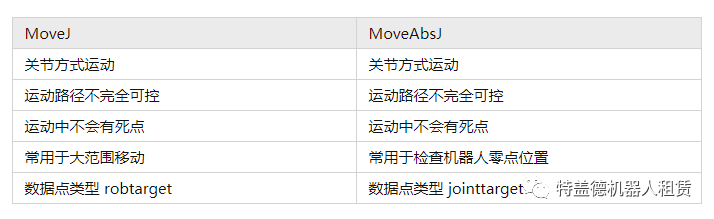
MoveJ :1、运动路径一般为曲线;2、速度较快;3、一 般为大范围运动;4、运动路径一般不可控;5、运动过程中一般不存在奇异点;
MoveAbsJ 指令:移动机械臂至绝对位置。机器人以单轴运动的方式运动至目标点,不存在死点,运动状态完全不可控制,避免在正常生产中使用此命令。指令中TCP 与 Wobj只与运动速度有关,与运动位置无关。MoveAbsJ 指令常用于检查机器人零点位置,其指令示例如下图所示。

总结:
MoveAbsJ :1、运动路径完全不可控;2、运动过程中不可能存在奇异点;3、常用于回原点操作
MoveJ 和 MoveAbsJ 指令的区别:首先两者都是关节运动,但前者是普通关节运动,后者是绝对关节运动,两者采用的数据点类型也不同。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









