







 本文详细介绍了工业机器人中的四种基本运动指令:MoveJ(关节运动)、MoveL(直线运动)、MoveAbsJ(绝对位置运动)和MoveC(圆弧运动)。着重讨论了它们的运动方式、特点和适用场景,以及robtarget和jointtarget数据类型的差异。
本文详细介绍了工业机器人中的四种基本运动指令:MoveJ(关节运动)、MoveL(直线运动)、MoveAbsJ(绝对位置运动)和MoveC(圆弧运动)。着重讨论了它们的运动方式、特点和适用场景,以及robtarget和jointtarget数据类型的差异。
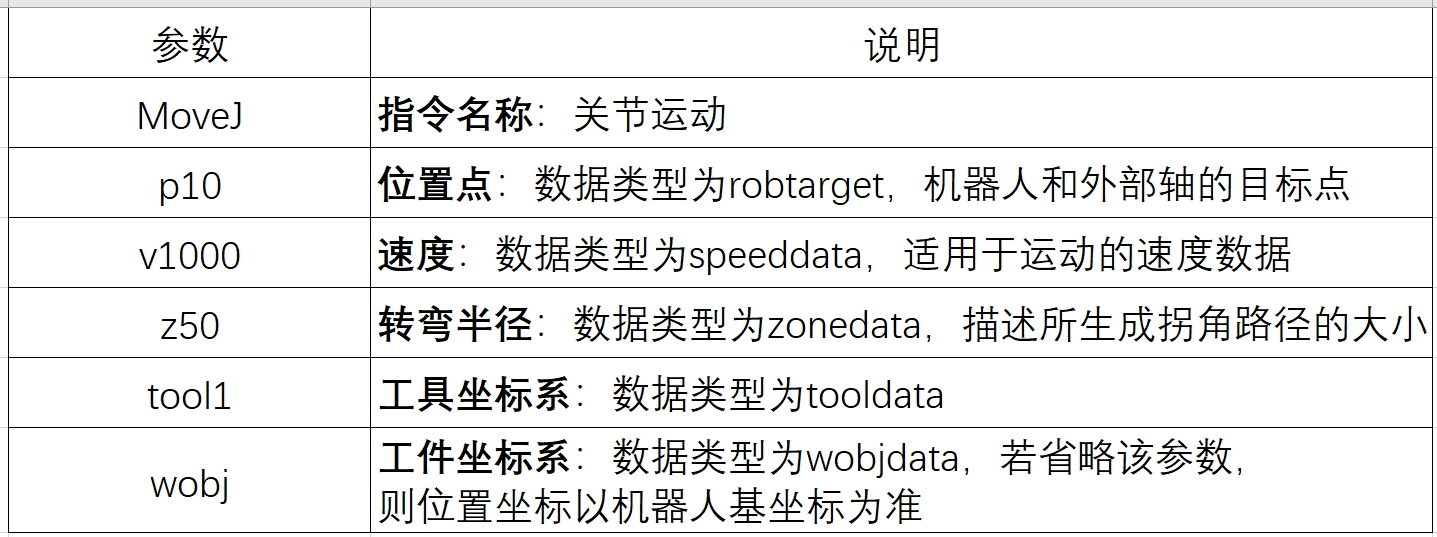
1.关节运动 MoveJ
MoveJ:关节运动指令,示教位置点的数据类型为robtarget。将机器人的TCP点快速运动到给定目标 点,运行轨迹不一定是直线,一般不存在奇异点。如:机器人以最快捷的方式运动至目标点,其运动状 态不完全可控,但运动路径保持唯一,MoveJ指令常用于机器人在空间大范围移动。
MoveJ p10, v100, z50, tool0\wobj:=wobj0;
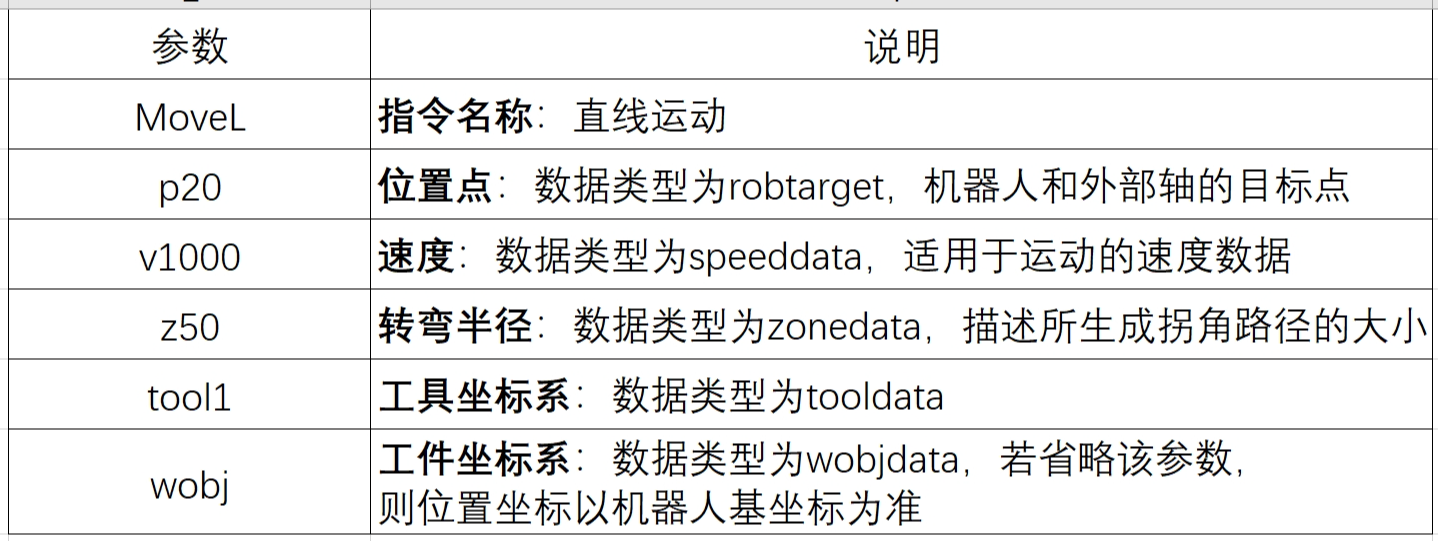
2.直线运动MoveL
机器人以线性移动方式运动至目标点,当前点与目标点两点决定一条直线,机器人运动状态可控制,运动路径唯一,可能出现死点。MoveL 指令常用于机器人在工作状态移动。
MoveL p10, v100, z50, tool0\wobj:=wobj0;
3.绝对位置运动MoveAbsJ
MoveAbsJ 指令:移动机械臂至绝对位置。机器人以单轴运动的方式运动至目标点,不存在死点,运动状态完全不可控制,避免在正常生产中使用此命令。指令中TCP 与 Wobj只与运动速度有关,与运动位置无关。MoveAbsJ 指令常用于检查机器人零点位置。
MoveAbsJ jpos10, v1000, z50, tool0;
4.圆弧运动MoveC
机器人通过中间点以圆弧移动方式运动至目标点,当前点、中间点与目标点3点决定一段圆弧,机器人运动状态可控制,运动路径保持唯一。MoveC指令常用于机器人在工作状态移动。
MoveC p30, p40, v1000, z50, tool0\wobj:=wobj0;

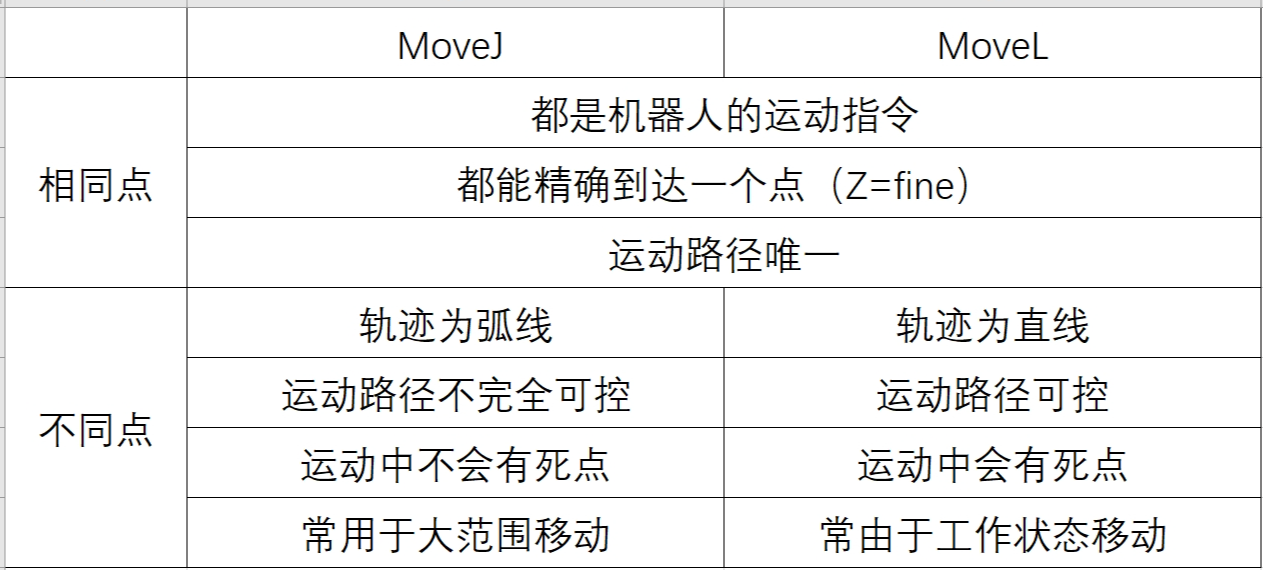
5.MoveJ与MoveL区别
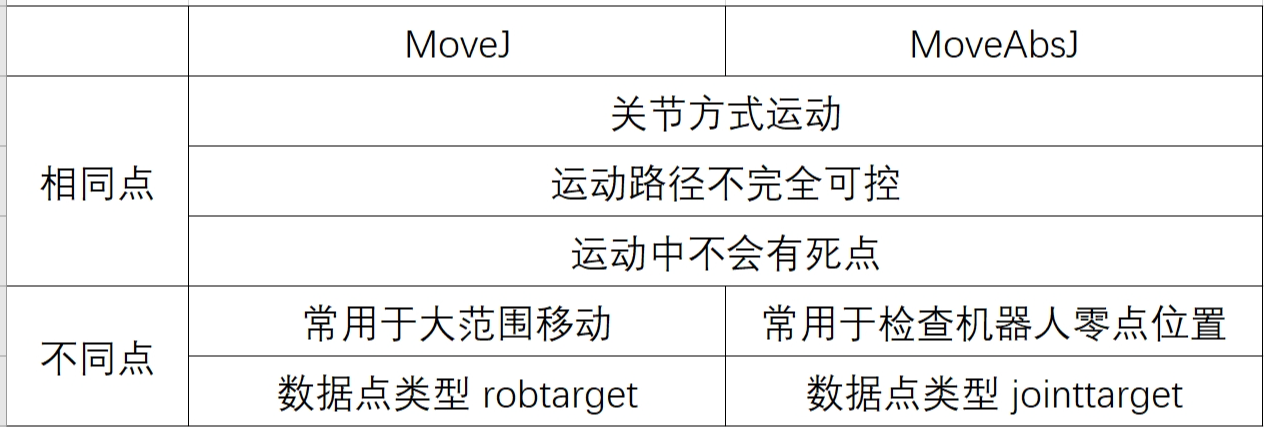
6.MoveJ 和 MoveAbsJ 的区别
7.robtarget 和 jointtarget 数据的区别
robtarget:以机器人 TCP 点的位置和姿态记录机器人位置。用于 MoveJ、MoveL、MoveC 指令中。
jointtarget:以机器人各个关节值来记录机器人位置,常用于机器人运动至特定的关节角。用于MoveAbsJ 指令中。


















 4714
4714

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









