






一、POSPac UAV 轨迹解算
1.1、数据检查
1.1.1项目拷贝下来会自动生成一下的目录文件
 1.1.2惯导数据在目录下的INS-GPS-RAW(RAW=原始的意思)文件夹下
1.1.2惯导数据在目录下的INS-GPS-RAW(RAW=原始的意思)文件夹下

1.1.3基站数据是地面接收机拷贝下来的文件数据,一般规范化管理是放到惯导数据下的子文件夹BASE内
也就是平时静态数据拷贝下来的文件,也就是基站的观测数据,这也是解算轨迹的基础数据,等同于ppk解算。
1.1.4检查一下INS-GPS-RAW目录下的惯导数据是否正常,根据你飞行的时间来判断惯导数据是否缺失,文件2分钟为单位会自动生成文件,T04和对应的T04.CRC(T04的报告文件)文件。

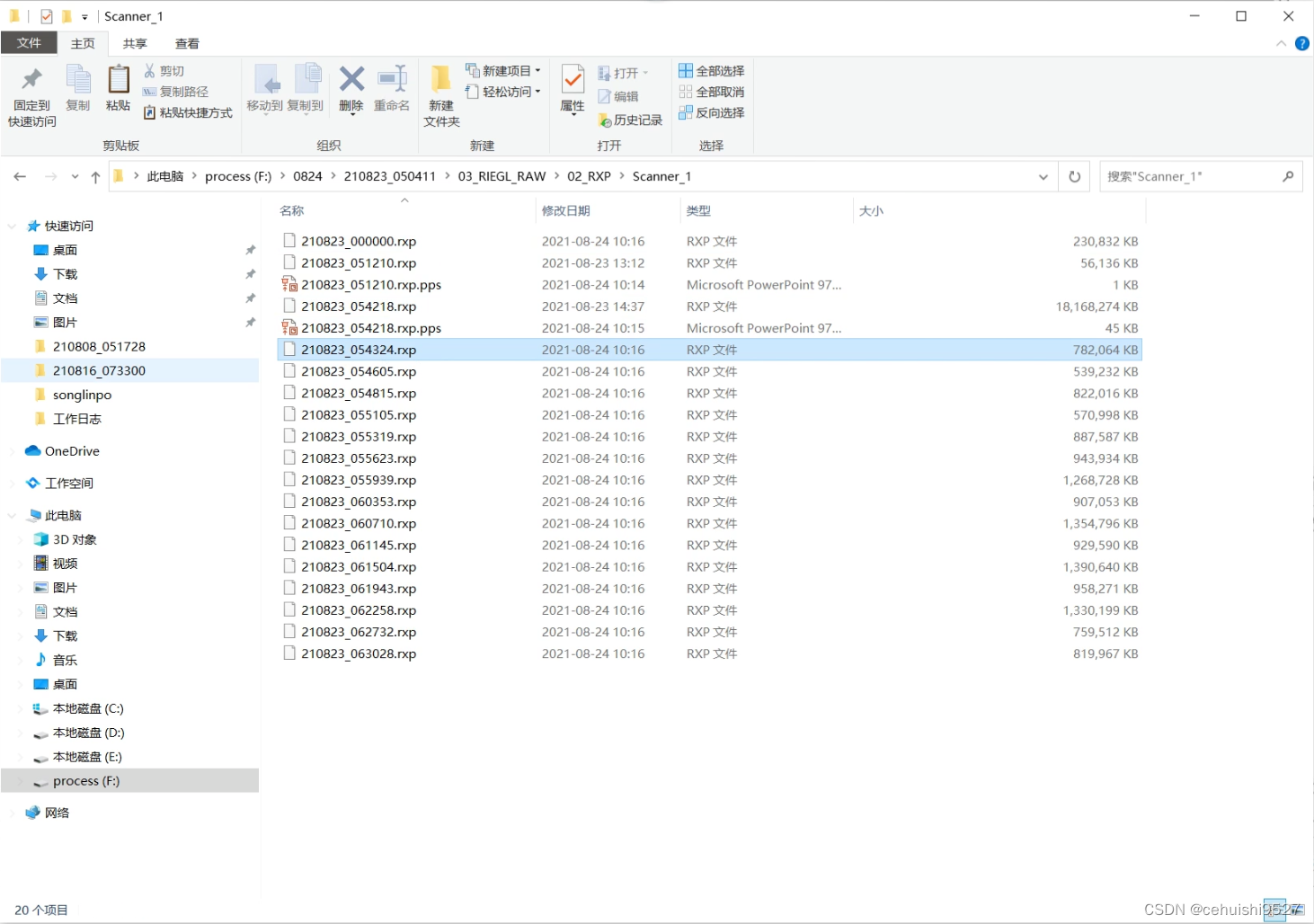
1.1.5扫描仪数据存放路径为03_RIEGL_RAW,格式为RXP数据(纯粹的空间位置信息,不包含任何坐标系,你可以理解为相对位置)这是RIEGL格式的点云数据。一般情况下文件夹下会产生两个文件数据,一个为地面试验激光扫描仪形成的数据,一般比较小,文件大的问工程的有效数据,也就是正常采集的数据。【有的时候激光扫描仪供电出现问题就会在作业的时候反复的自启动,从而会形成多个RXP文件,这个时候就出问题了,数据就不能正常解算和使用了】

1.1.6如果集成了相机,雷达采集数据的同时采集了影像数据,就把成果放到这个文件夹下面04_CAM_RAW,点云附色是需要使用的。

照片的时间戳,相当于相机和激光扫描仪相互匹配的一个链接

1.1.7解算完轨迹的工程文件存放路径05_INS-GPS_PROC,其中的01存放解算完成的成果文件,也就是差分pos数据,02保存的是解算完的工程文件。
1.1.8RiPROCESS建立的文件为rpp文件,会自动生成一个快捷方式,以后可以直接打开建立的文件。

rpl文件是如果解算失败,需要远程技术支持,就发送此文件就可以了,这个算是软件解算的过程记录文件,从中可以找出具体是那个环节解算出现的问题,便于远程技术人员针对性的查找问题。

1.2、数据转换
1.2.1天宝的数据T02、T04都支持直接拖到POSPac UAV中解算,其他品牌的仪器需要处理一下格式才可以处理。例如:千寻就需要用 来转换格式,也就是把DAT文件转换位RINEX标准的静态观测数据。
来转换格式,也就是把DAT文件转换位RINEX标准的静态观测数据。
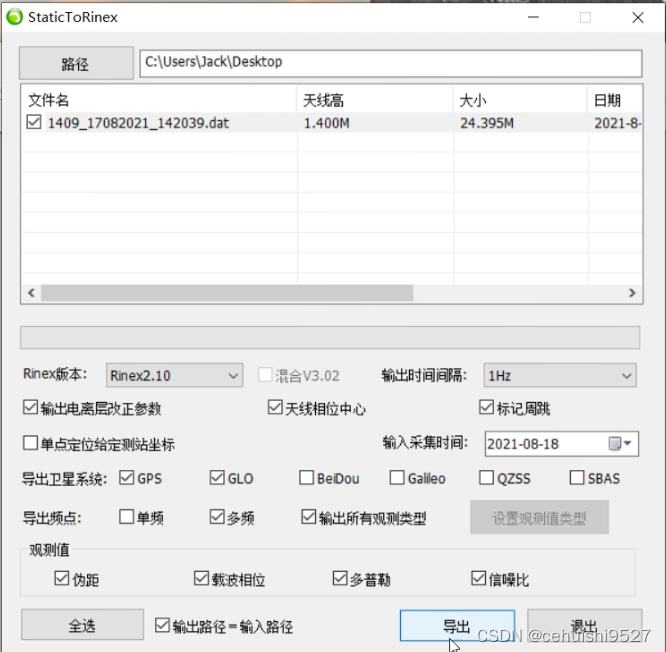
主要使用的是转换出来的O文件,也就是记录卫星信息的文件,了解静态观测解算数据的应该很好理解这个知识点。
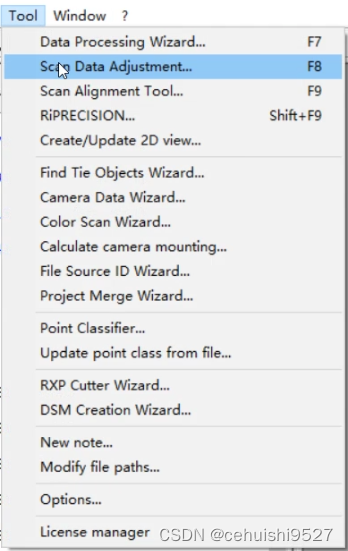
1.3、轨迹数据导入
软件界面如下,解算轨迹使用的就是这个软件。
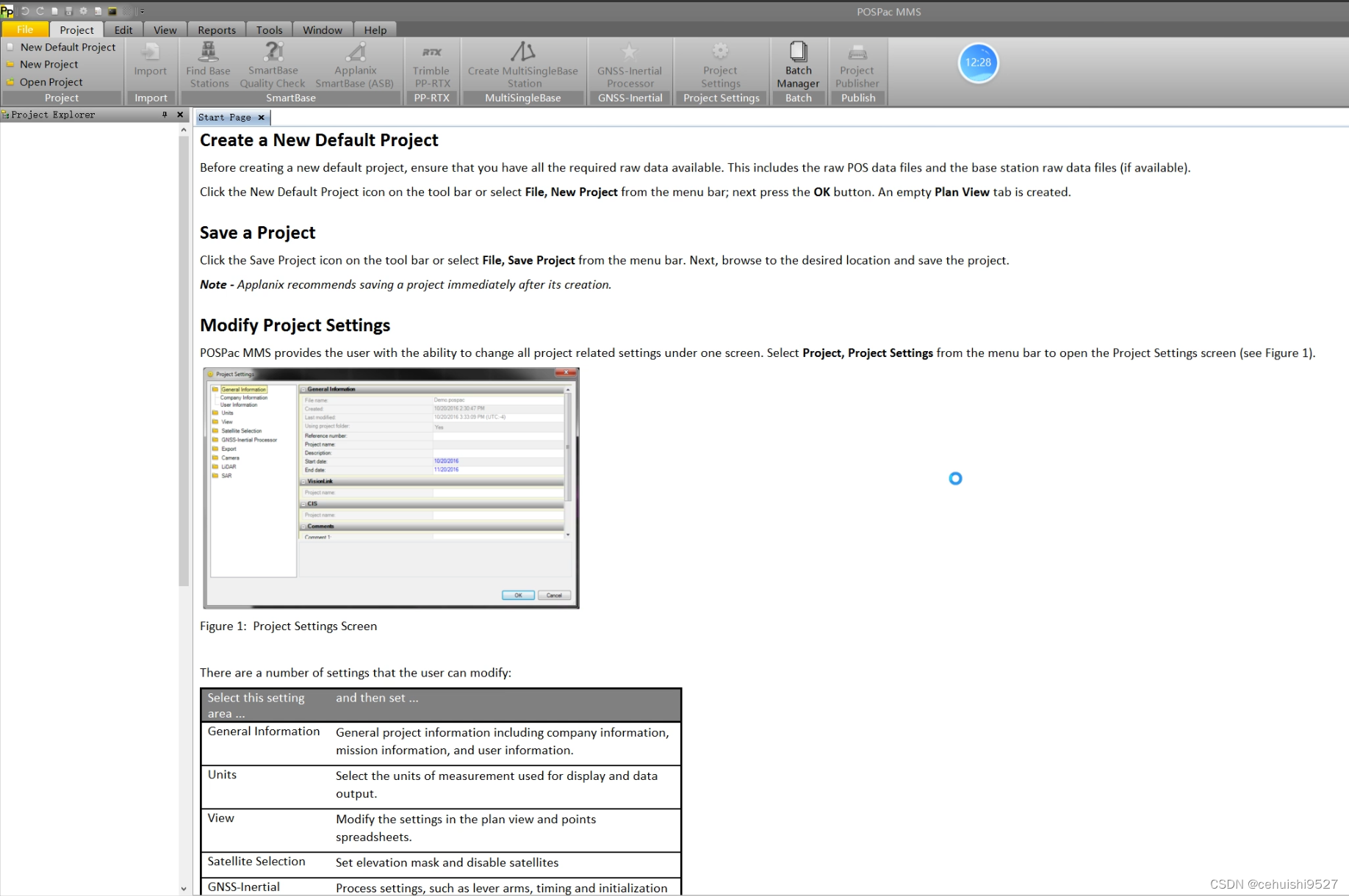
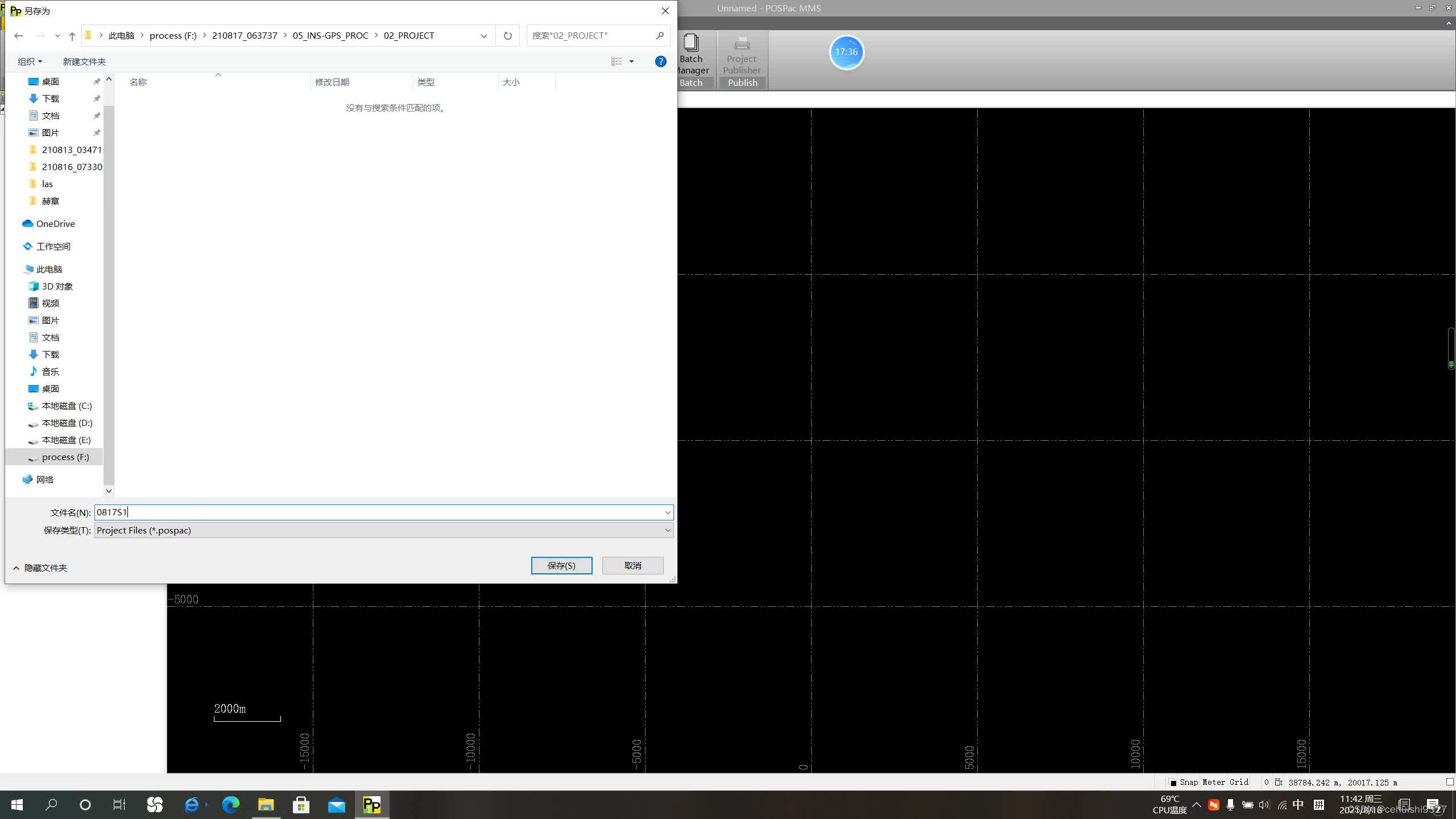
新建默认工程,保存在05_INS-GPS_PROC下02_PROJECT下,全程用英文路径,不要出现中文的路径
导入惯导数据,找到T04文件直接拖入软件即可,然后导入基站数据,进行后差分解算。

导入弹出界面
关掉首个界面,不检查
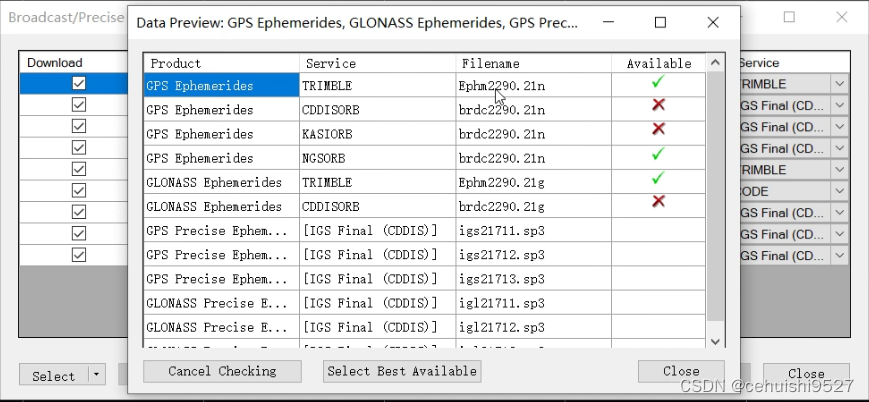
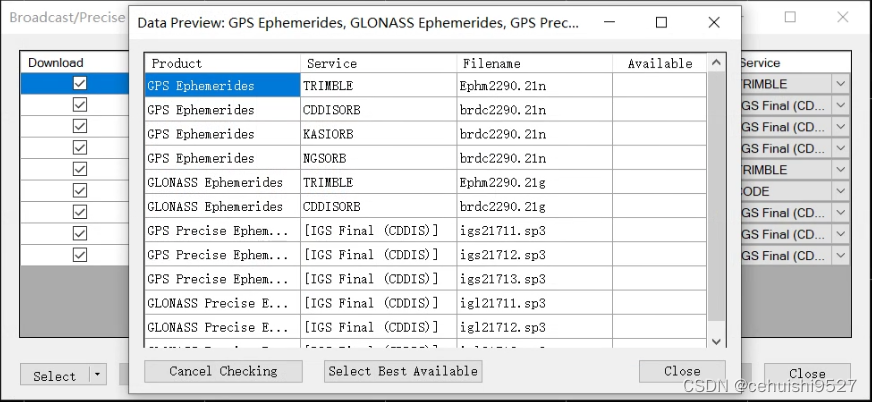
关闭下载星历弹出框

选择天线类型,默认不知道即可

开机时间过于长会出现下面的弹窗,但是不影响数据的解算。

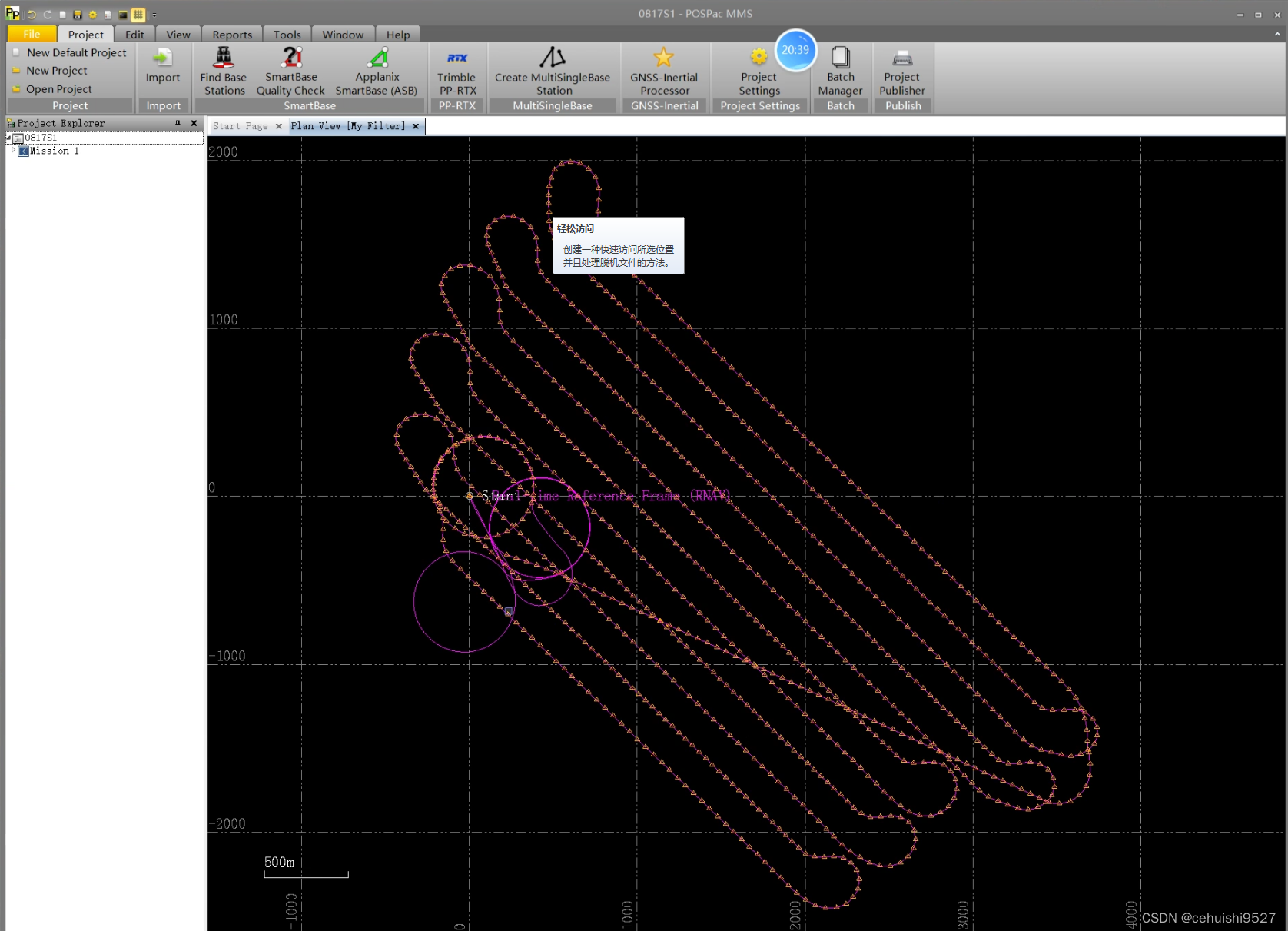
数据导入成功界面
1.4、基站数据导入
找到转换成功的O文件数据,界面会出现绿色的点位信息
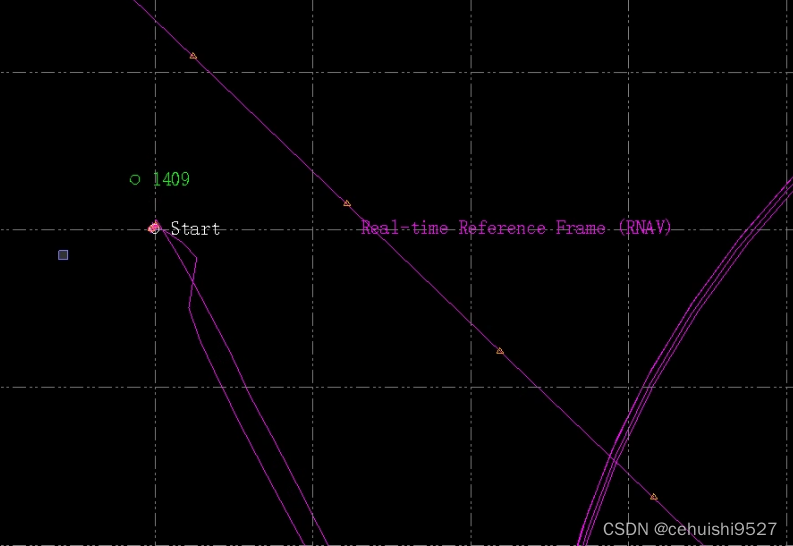
选中基站点位,选择坐标管理选项

坐标管理选项界面,输入基站经纬度,天线高等相关的信息。

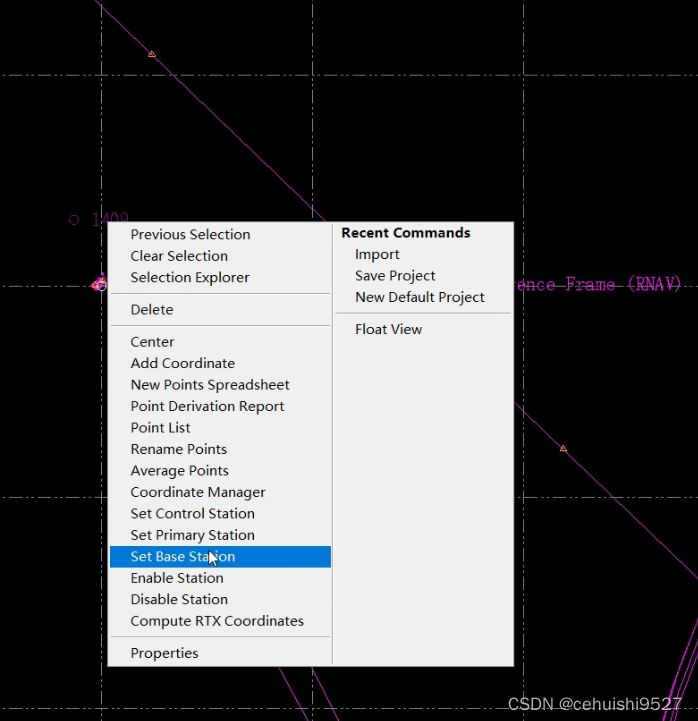
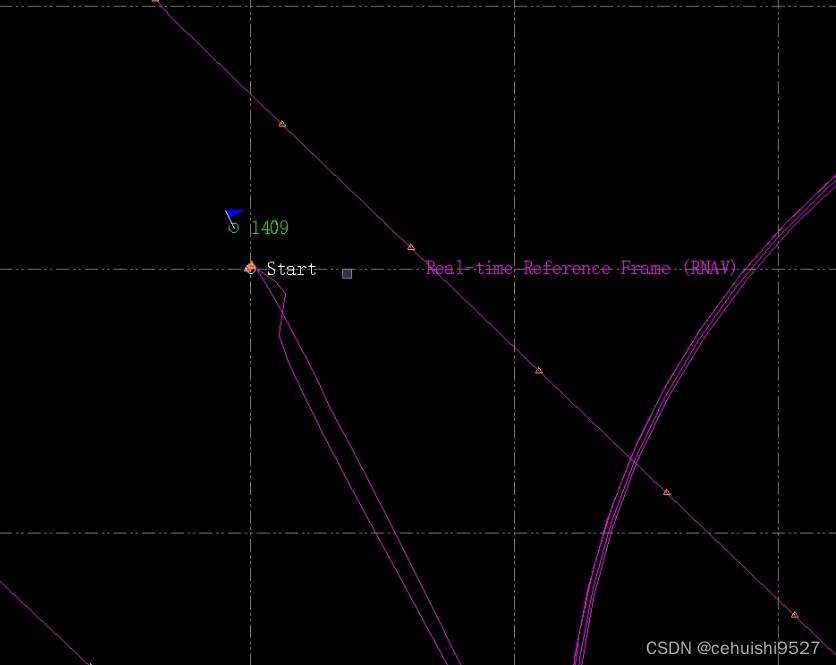
设置好之后,应用保存,下一步设置为基站
 开始解算流程,解算完成弹窗
开始解算流程,解算完成弹窗

显示解算的结果,固定解为99.85%,浮点解0.1%,单点解0.05%,数据质量还是很不错的,设置成功的标志为导入的基站点插上了蓝色的小旗子
1.5、解算位置
解算的是GPS天线和惯导之间的相对关系
第一步、卫星数据的平滑处理![]() ,一般是选择Single Base模式
,一般是选择Single Base模式

解算的过程

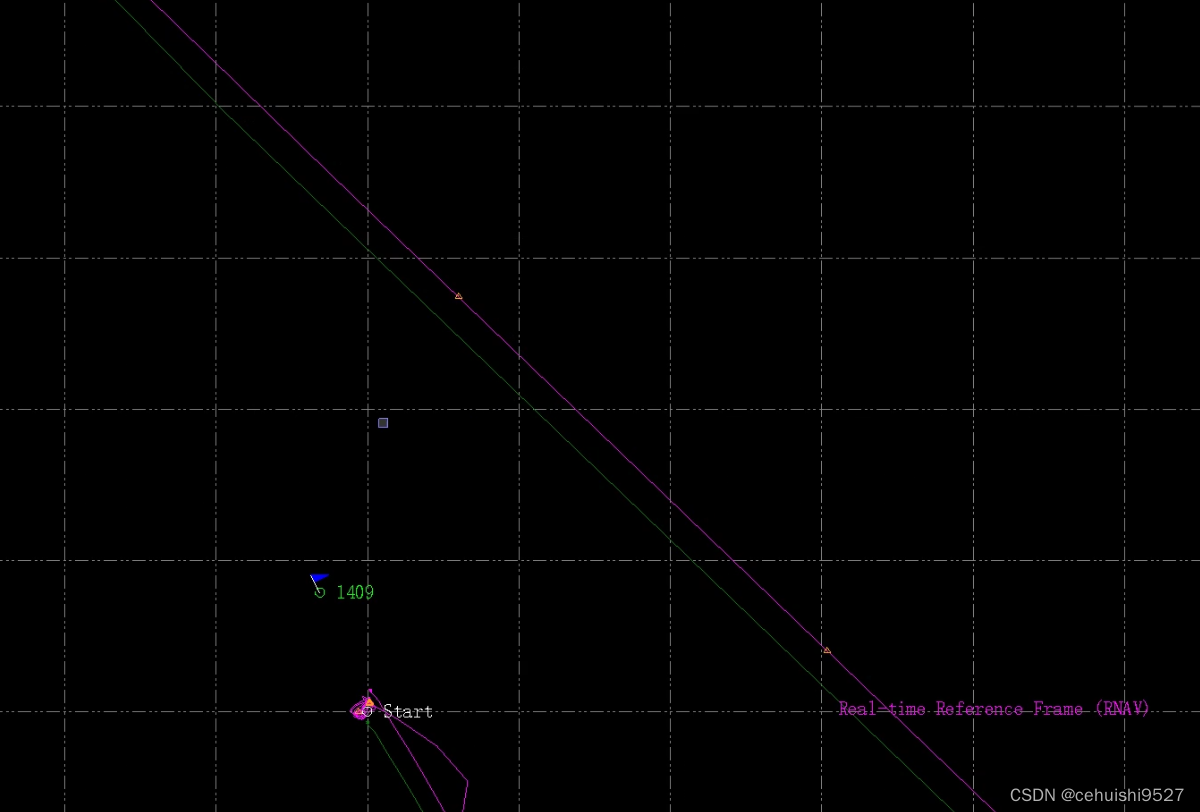
解算完成之后原来的轨迹会变为绿颜色
解算完成之后,打开Reports-Display Plots

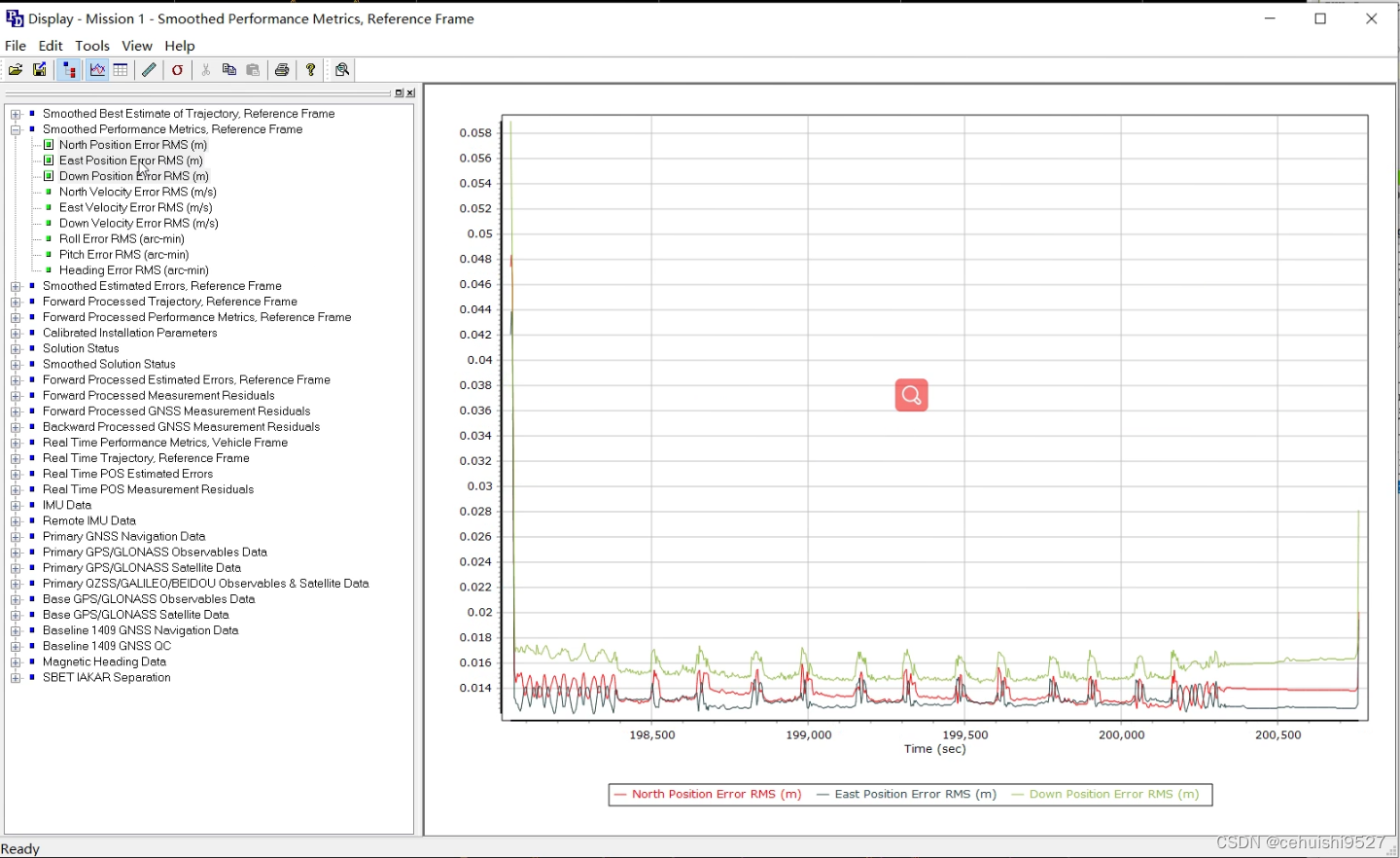
需要查看的信息,GPS卫星的误差

xyz全选查看误差信息,SHIFT全选右键选择Display Selected
显示的内容
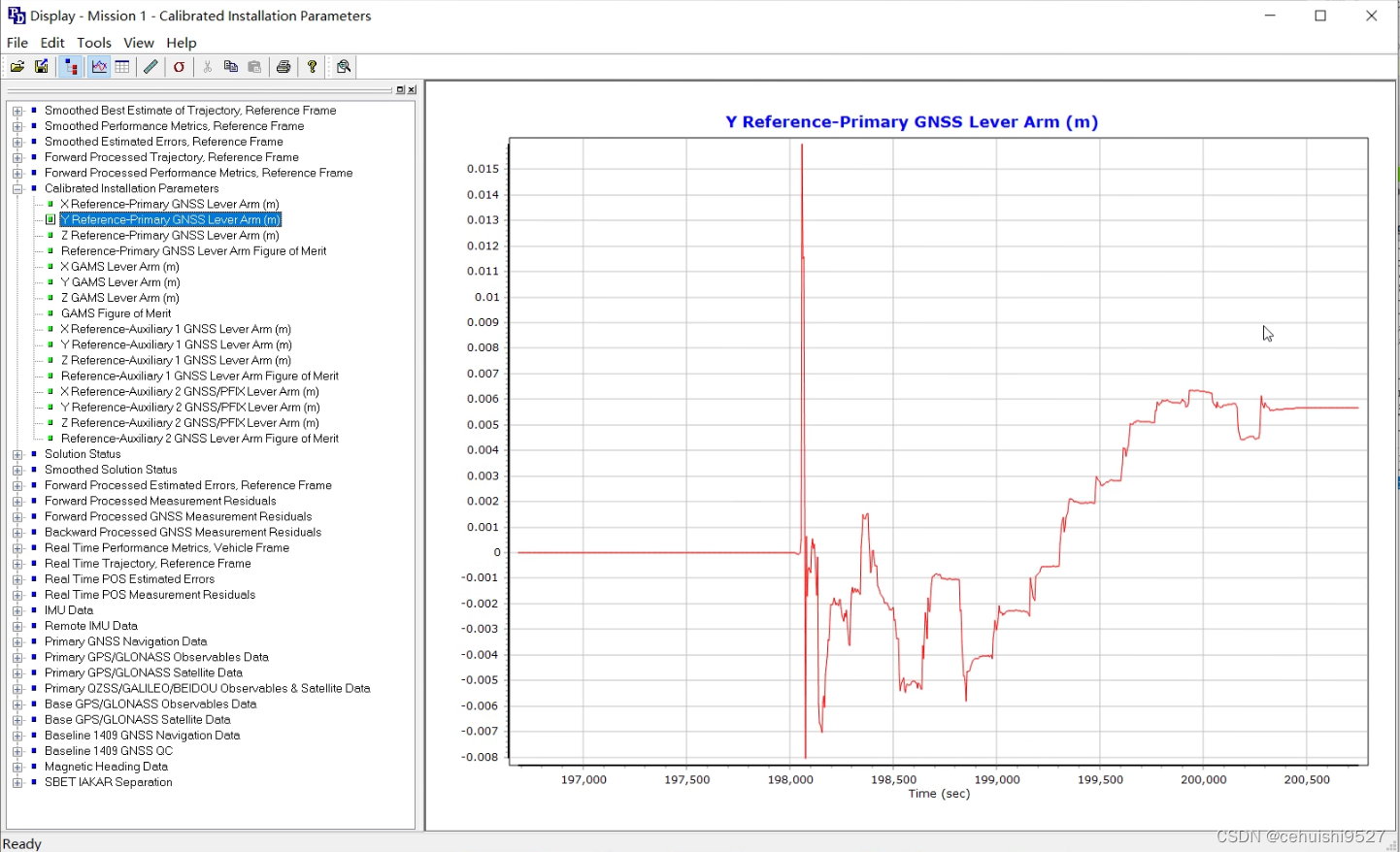
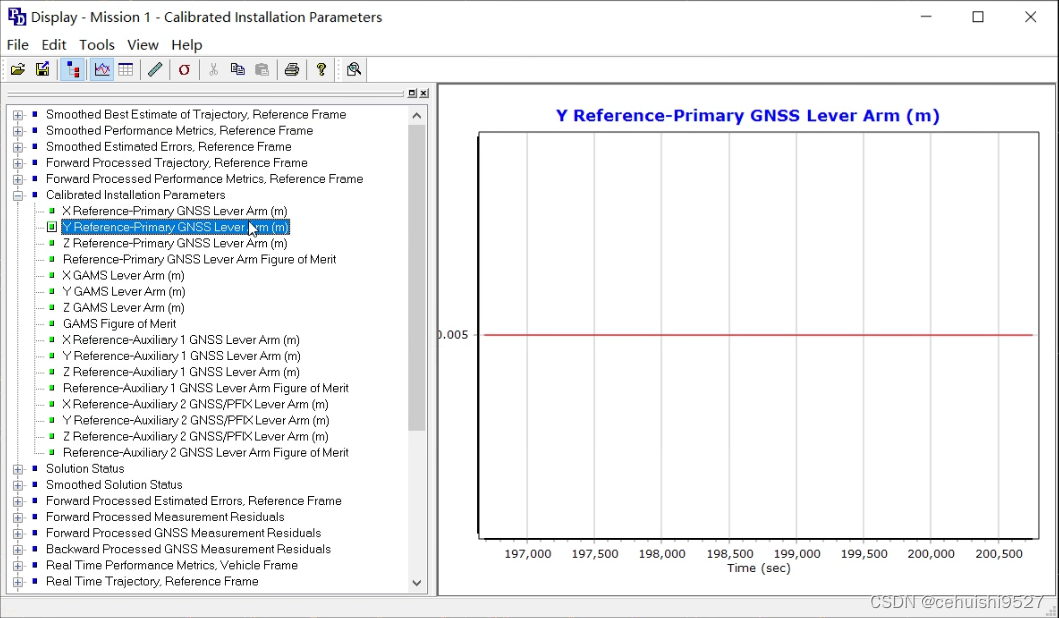
Lever Arms查看界面
惯导静置的前后5分钟是平的,中间的时间是波动的,这个值代表惯导到天线的位置,实际的数据采集的过程中由于飞机的颠簸和震动这是数据是会有微小的变化的。
在下面的路径下建立记录Lever Arms(杆臂值)的文件
取右侧平滑的位置数据作为杆臂值的初始值

第二步、Lever Arms and Mounting Angles

将计算出来的杆臂值出入到上面的界面中

输完之后,重新解算一下卫星数据

重复查看杆臂值的界面,对比一下前后的数据,本次解算的数据差距为5mm,1cm都不到,正常情况下3cm之内就可以了,符合要求了。

修改完杆臂值之后重新跑一下数据,这是一个迭代处理的过程

最终的效果是,杆臂值收敛了,平了,这样就达到目的了
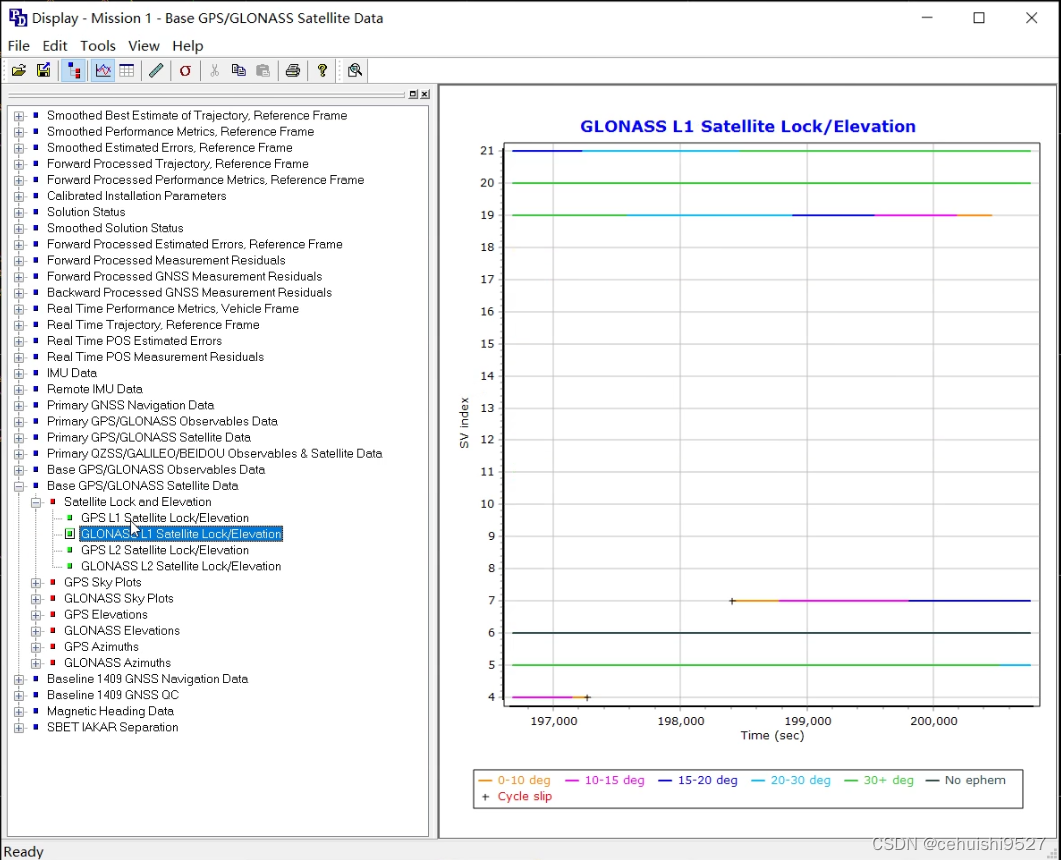
查看基准站卫星情况
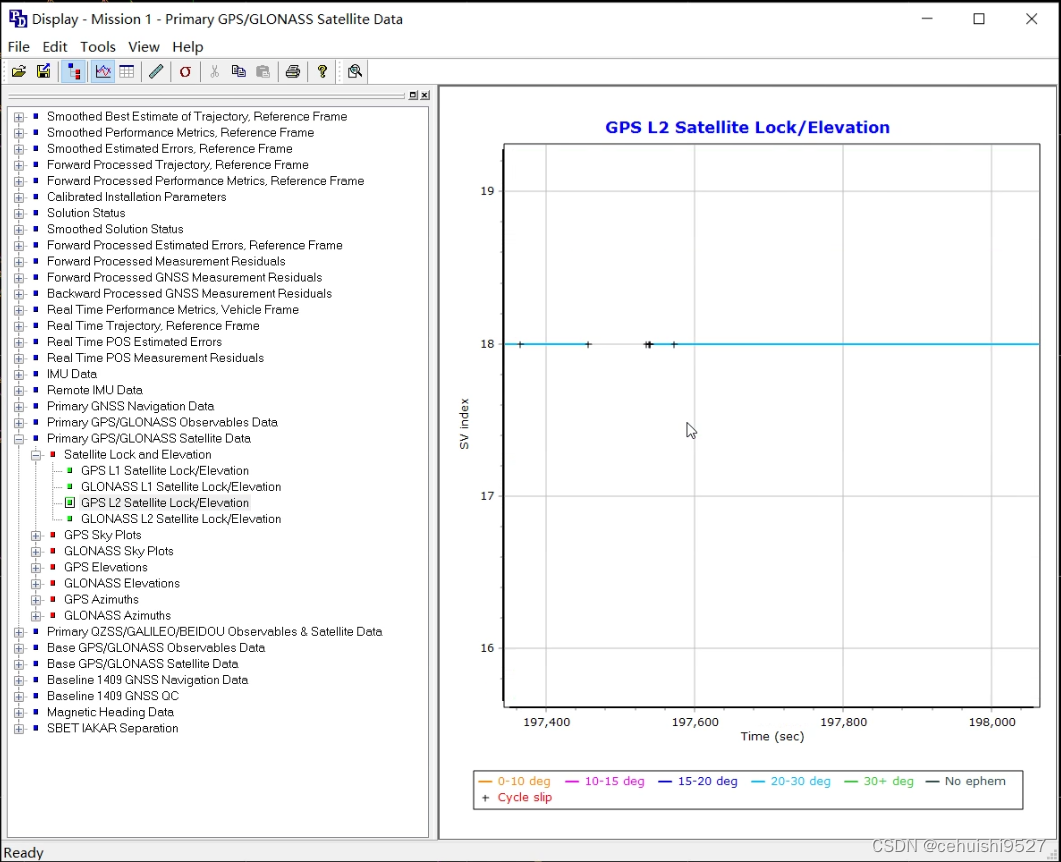
查看gps天线卫星情况
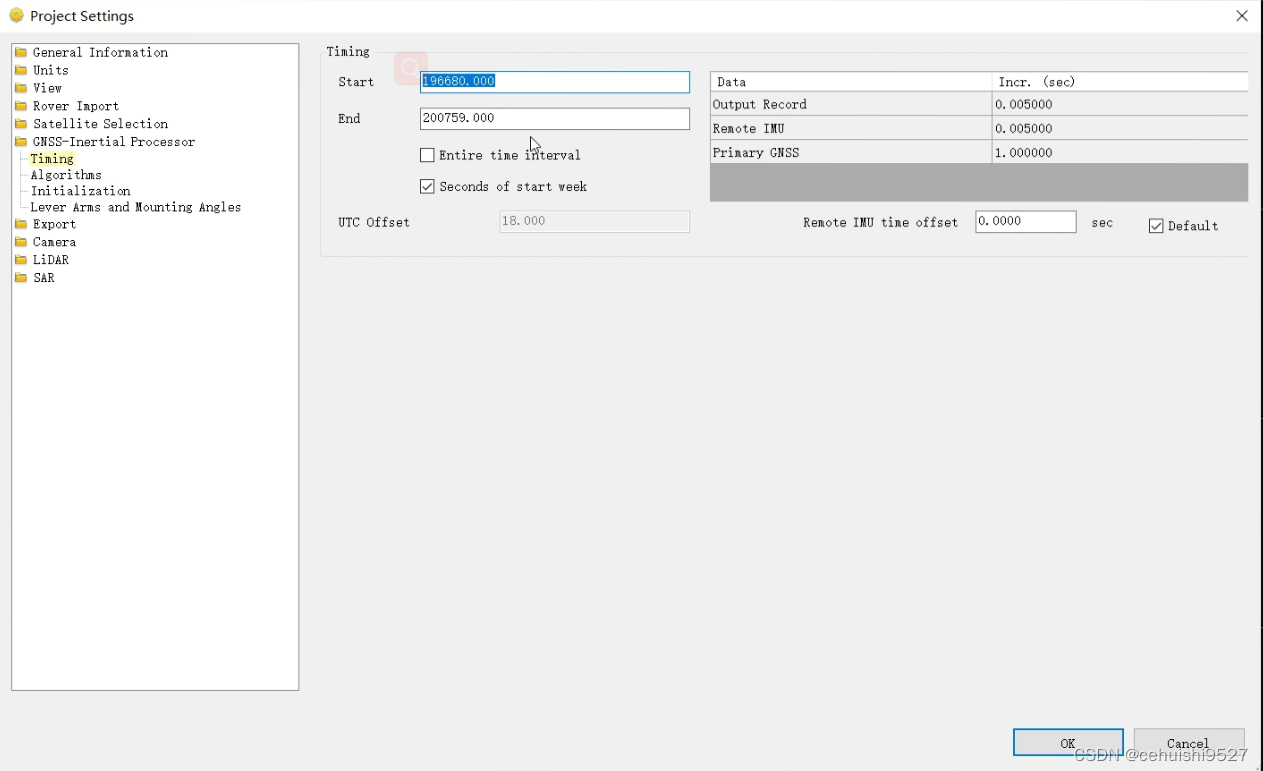
查看时间信息,IMU数据0.0005s,因为惯导为200HZ,GPS为1s
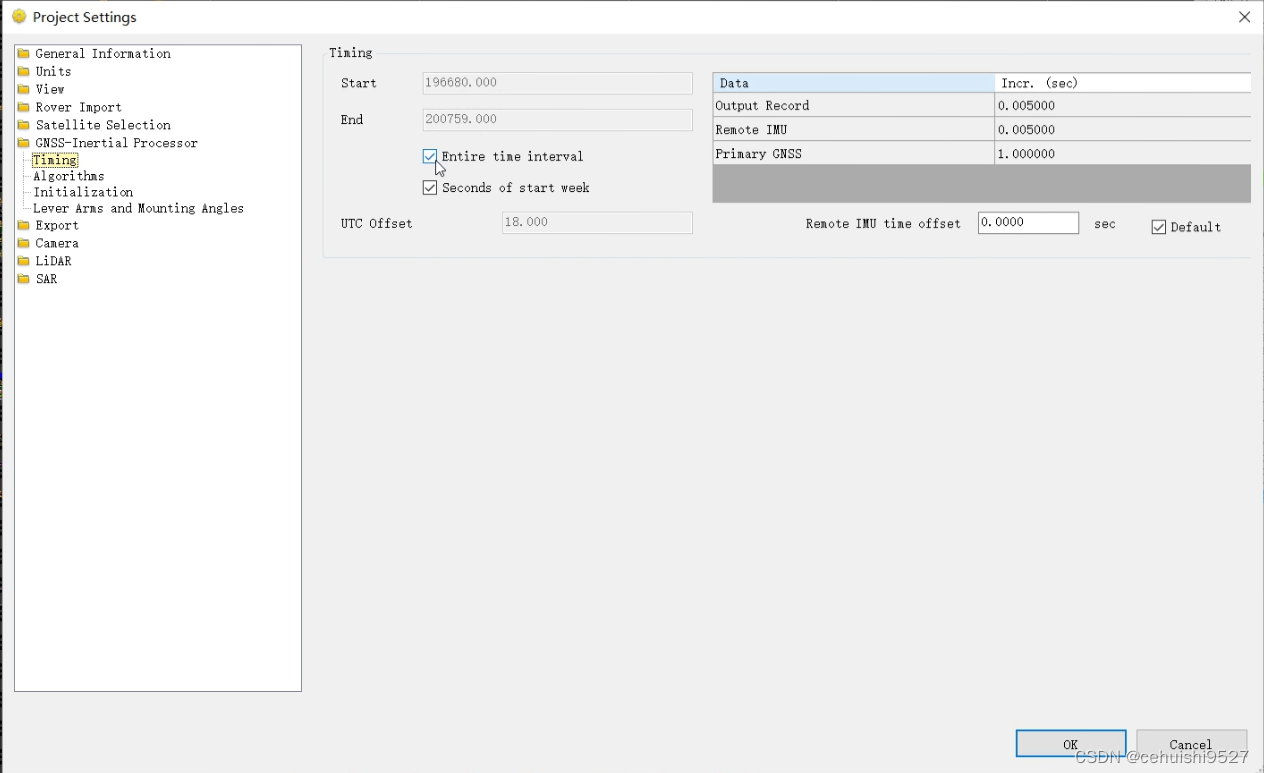
可以根据时间戳单独的采集分段的数据
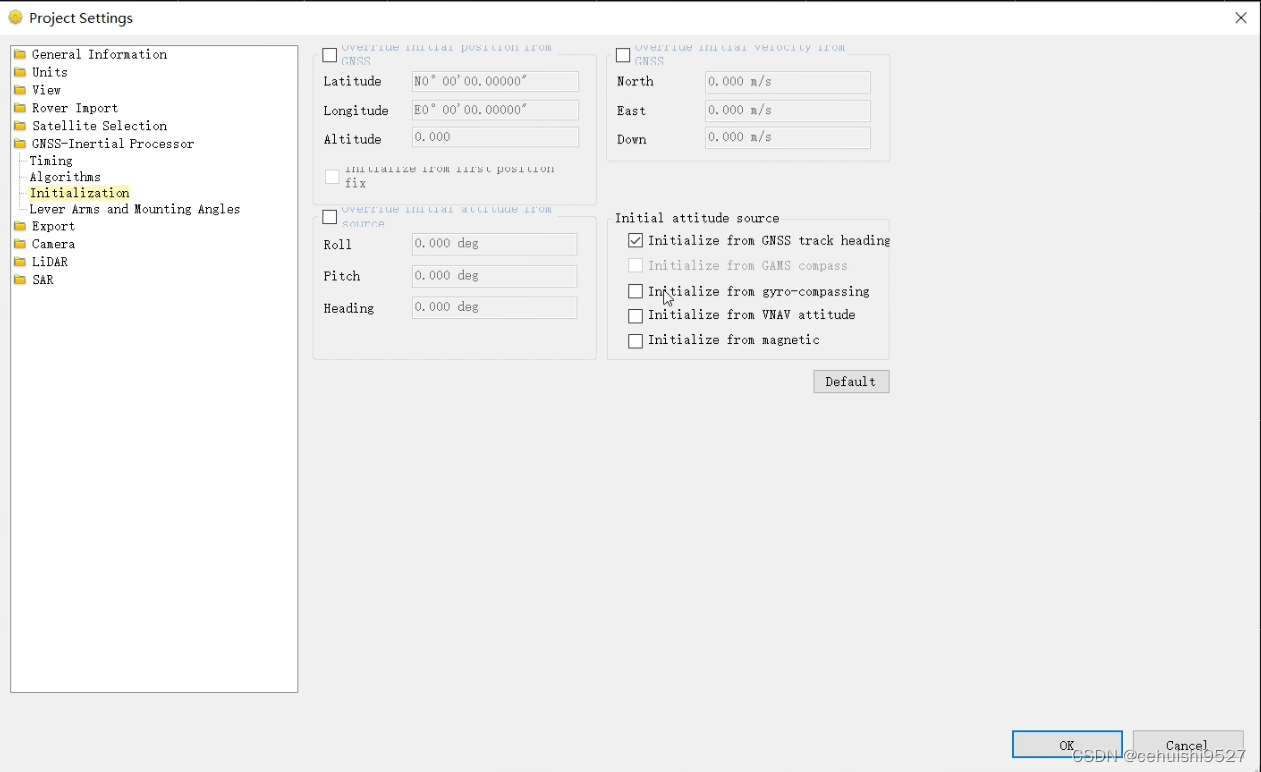
如果一种方式解算不出来,可以切换解算方式
1.6、成果输出
解算完成 输出成果文件,文件的路径为工程文件下,其中的TXT文件为解算的POS文件
输出成果文件,文件的路径为工程文件下,其中的TXT文件为解算的POS文件

具体的内容为

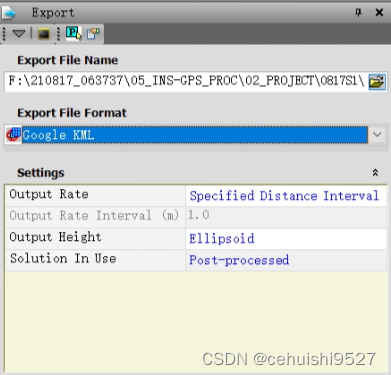
其他格式的输出
相机参数的基本修改

1.7、最终处理
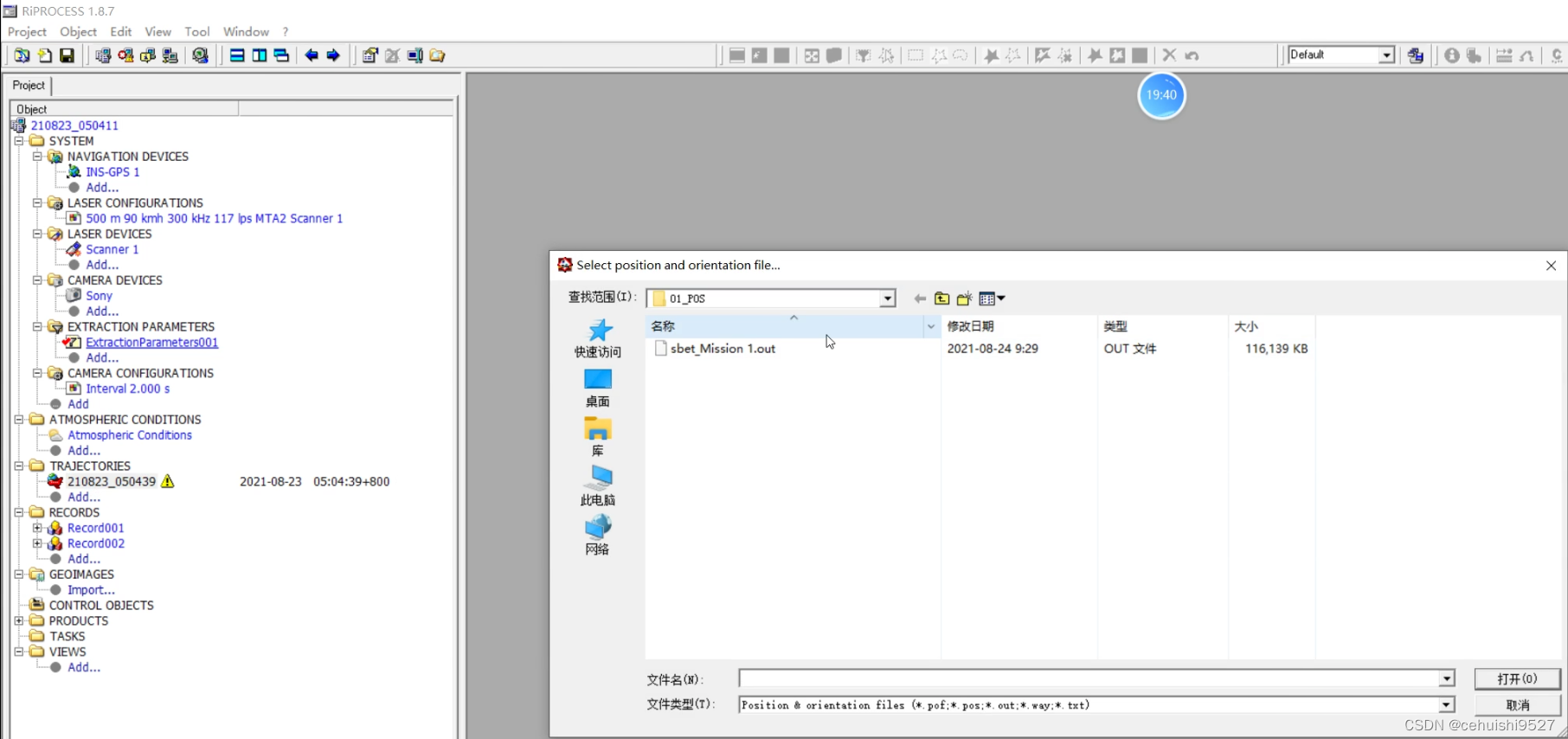
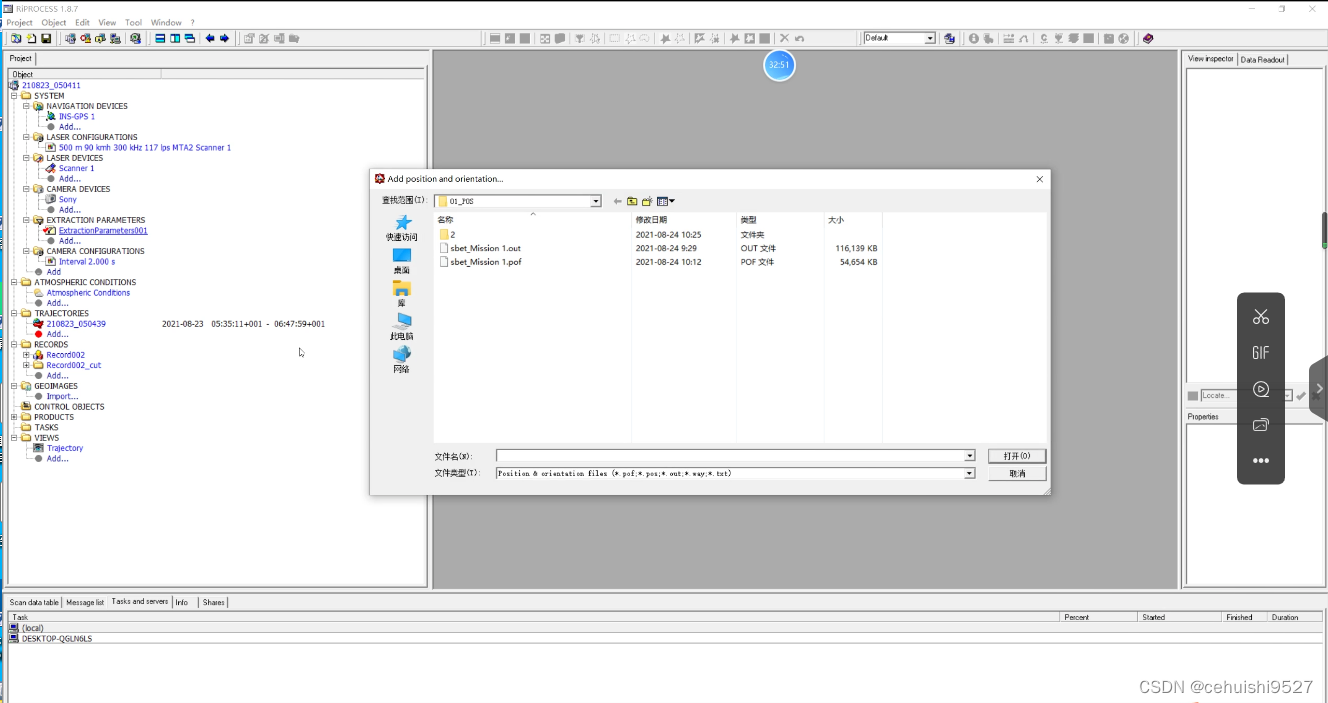
将轨迹解算工程下的文件sbet_Mission 1.out复制到05_INS-GPS_PROC\01_POS中,这个路径就是下一步RiPROCESS解算轨迹文件的默认路径。

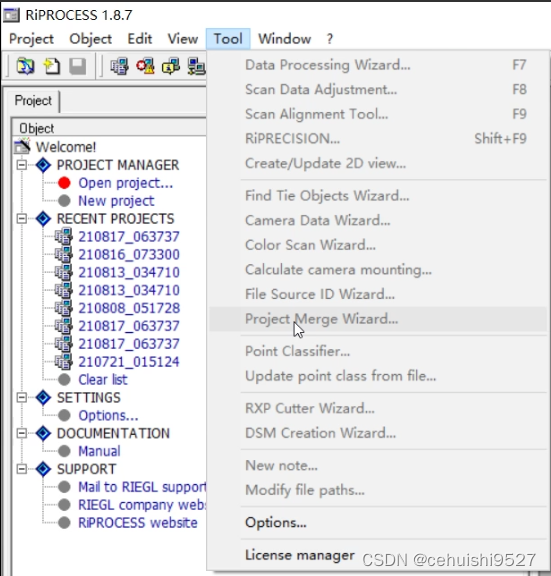
二、RiPROCESS
2.1飞行参数
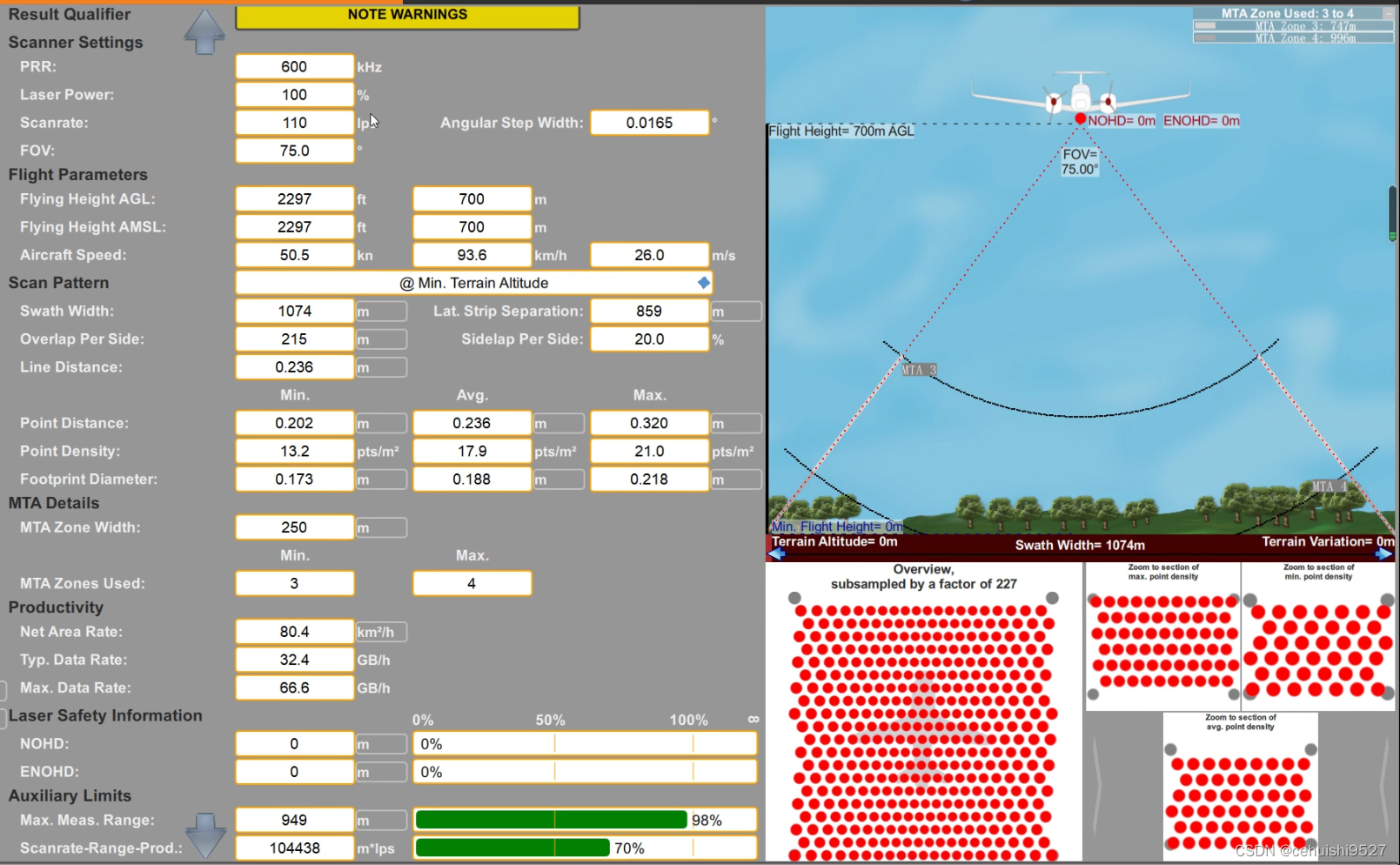
利用RiPARAMETER软件计算![]() ,界面如下
,界面如下
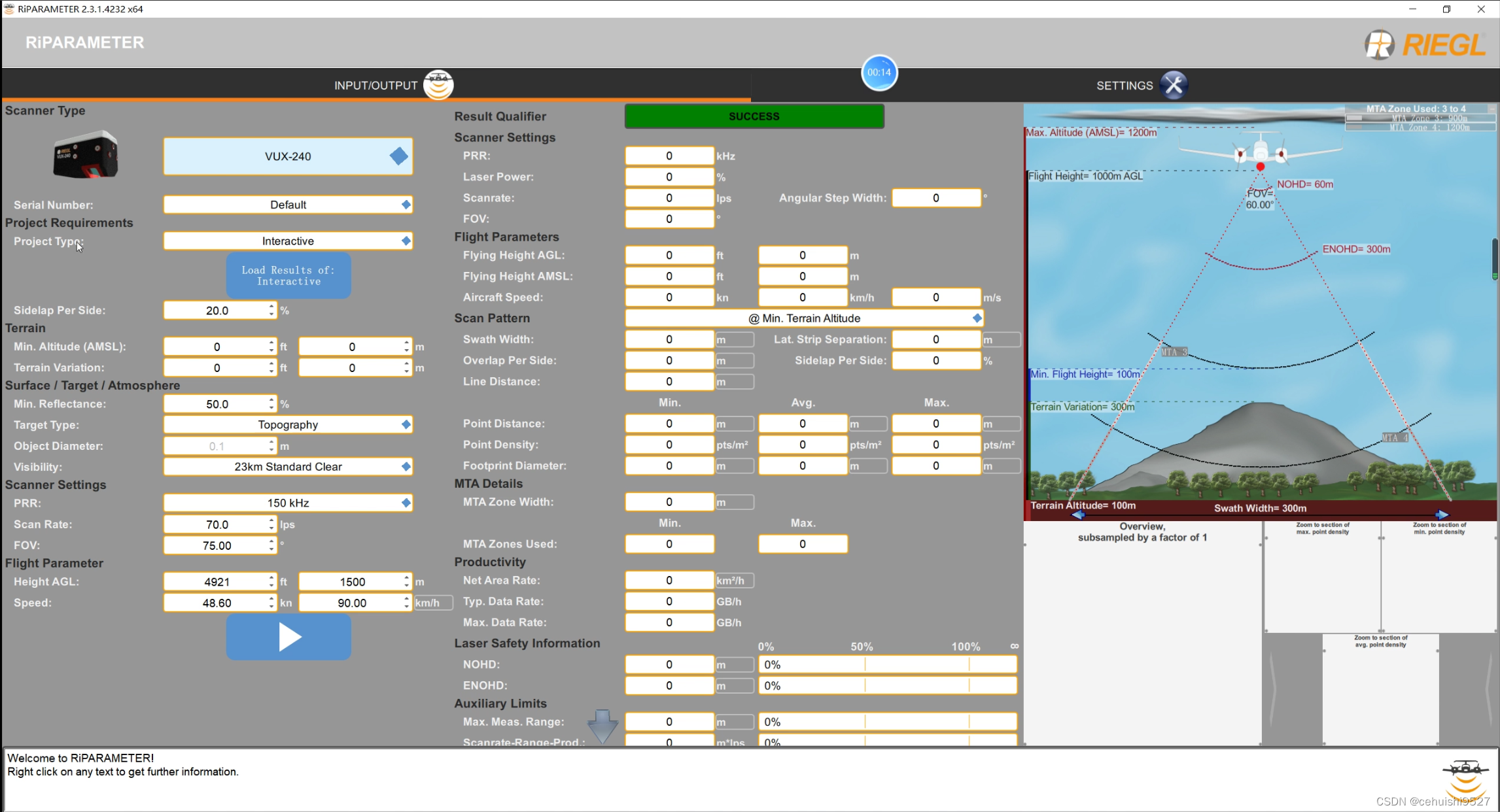
主要的参数输入
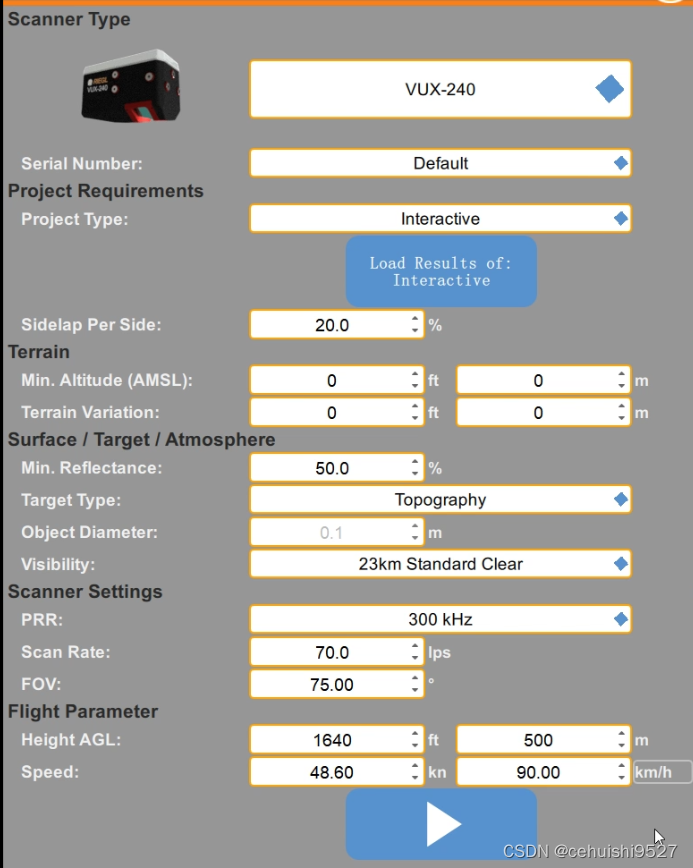
project type=interactive(交互)
sidelap per side=20%(重叠率)
min.Reflecttance=50%(反射率),计算电力线的时候就调为20%
prr=300khz(频率)
飞行高度=500米
速度=90km/h
计算结果如下
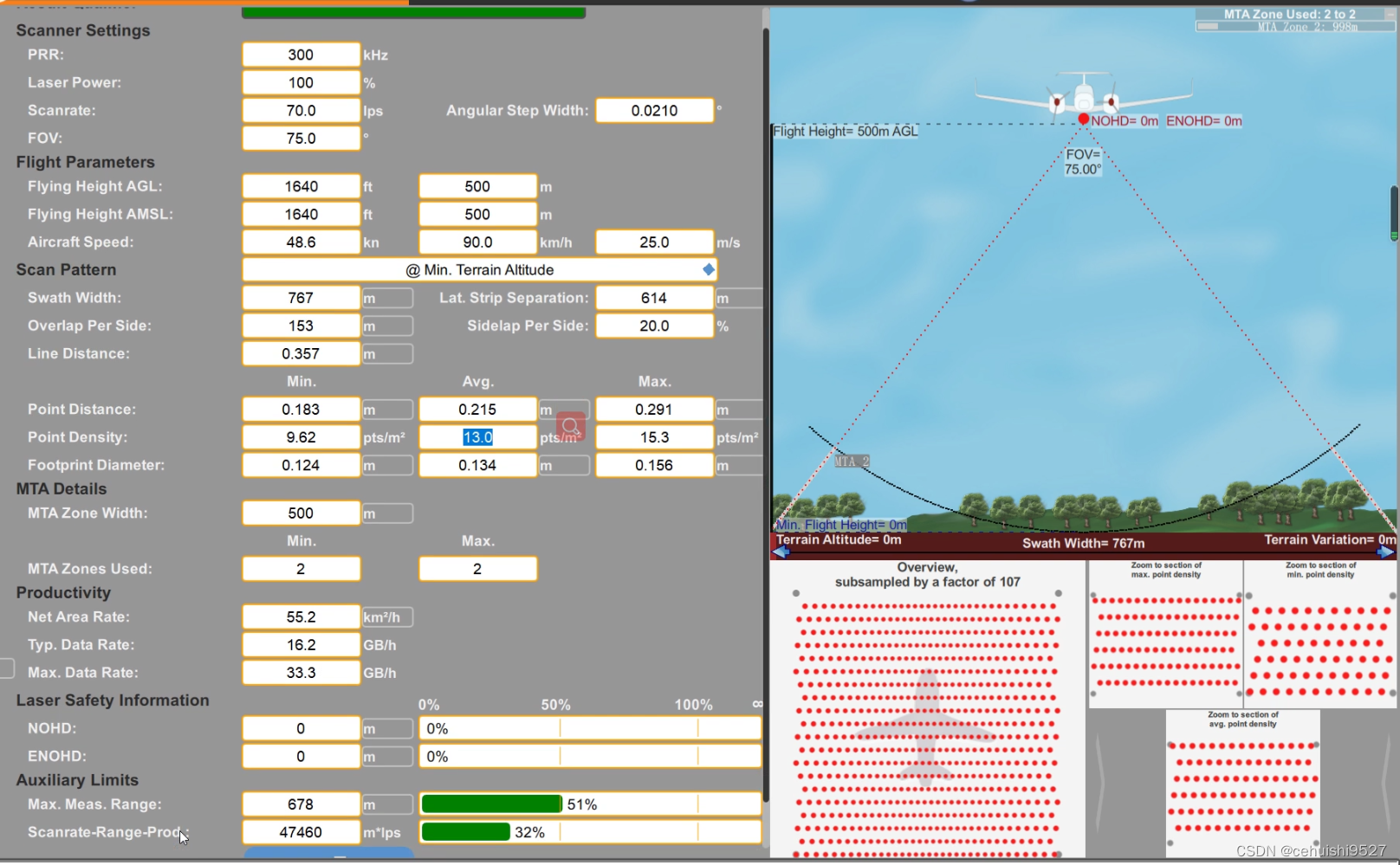
计算的结果中这个地方一定要显示是绿色的,否则就是参数设置的不太合适
出现以下的情况就是参数设置的不太合理了

根据你对点密度的需求,计算你需要设计的参数,project type=wide area mapping(宽地形)

设计参数如下:点密度需要平均16个点,point density=avg.16pts/㎡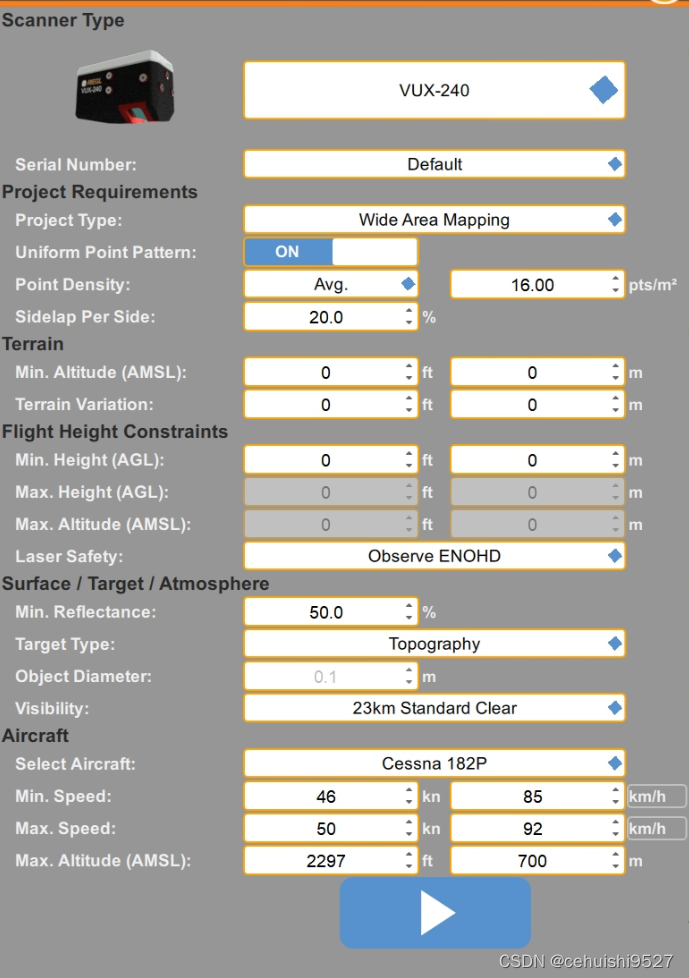 计算结果如下
计算结果如下
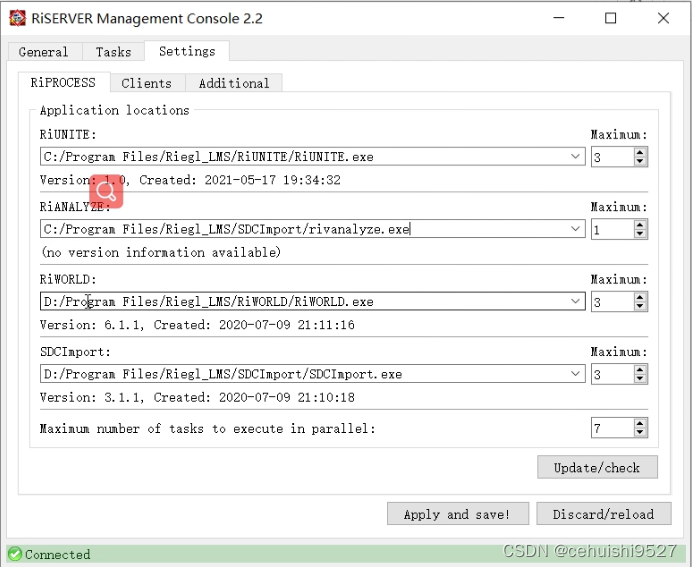
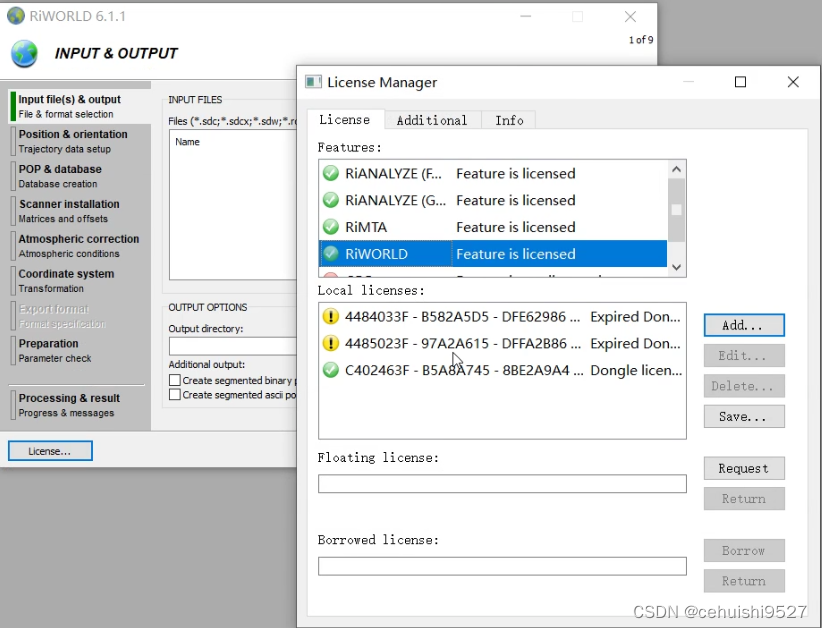
2.2软件安装及授权
第一步关联软件
查看授权许可
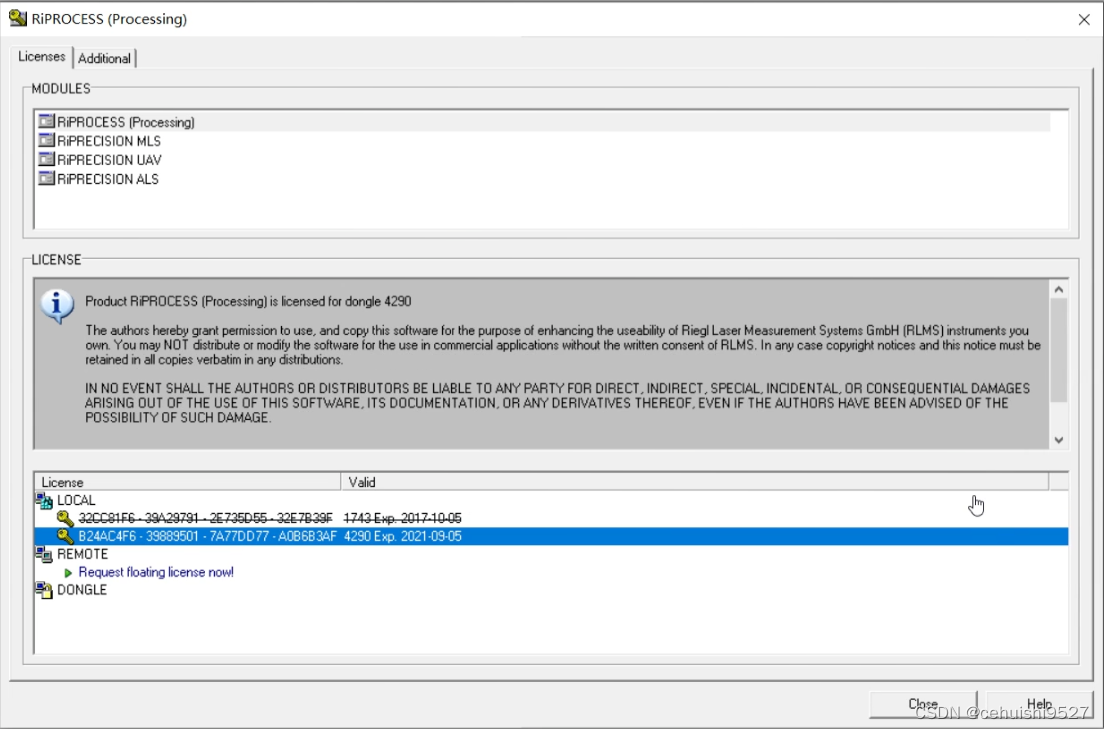
查看License manager,其中可以看见Dongle-ID=4290
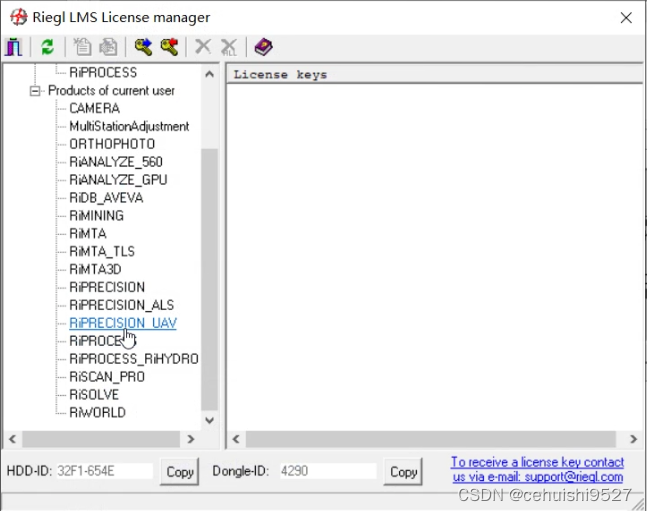
sdc授权文件
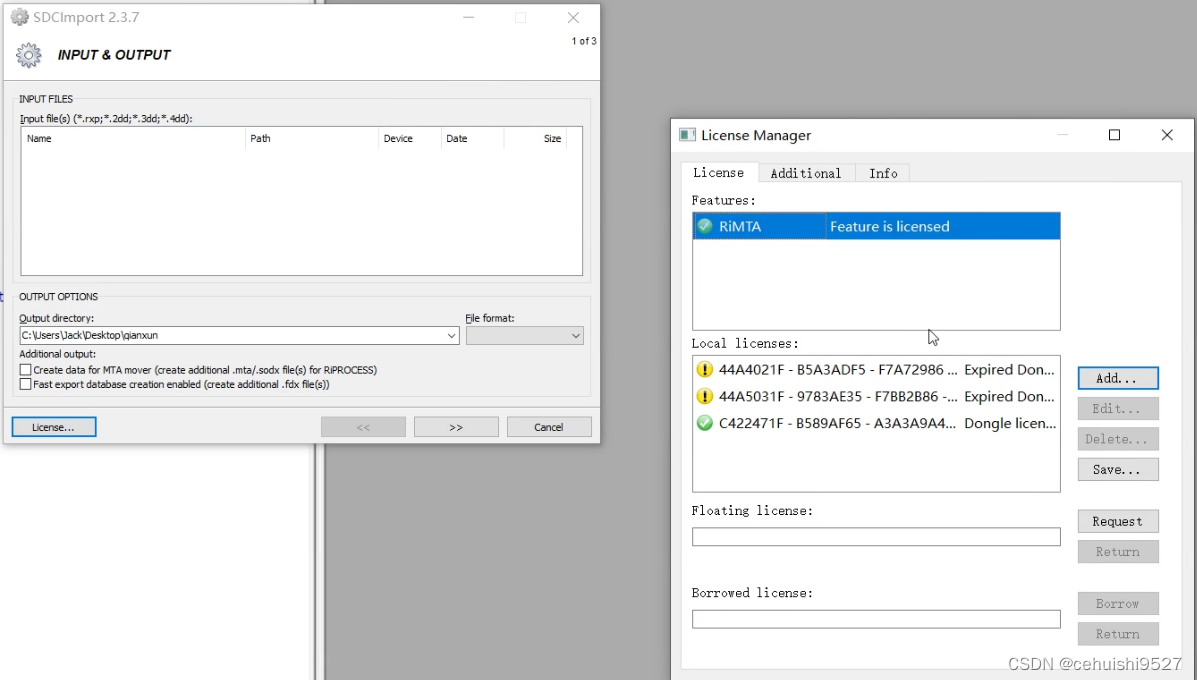
riword授权文件
2.3合并工程
合并架次,一起处理
2.4数据导入

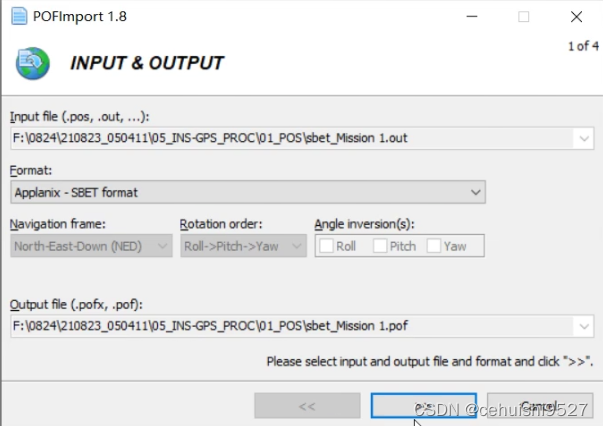
轨迹的导入,前提是跑出的POS文件导入到了指定的路径文件夹下
导入弹窗

2.5rxp文件剪切
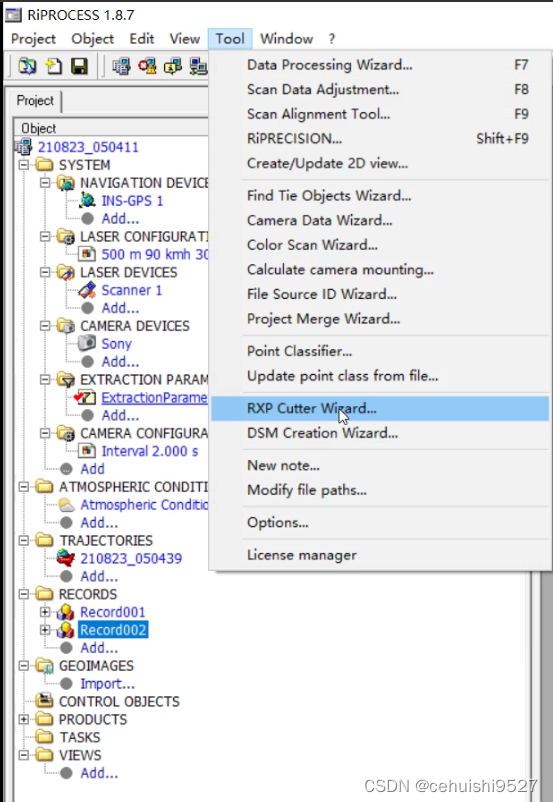
弹出界面
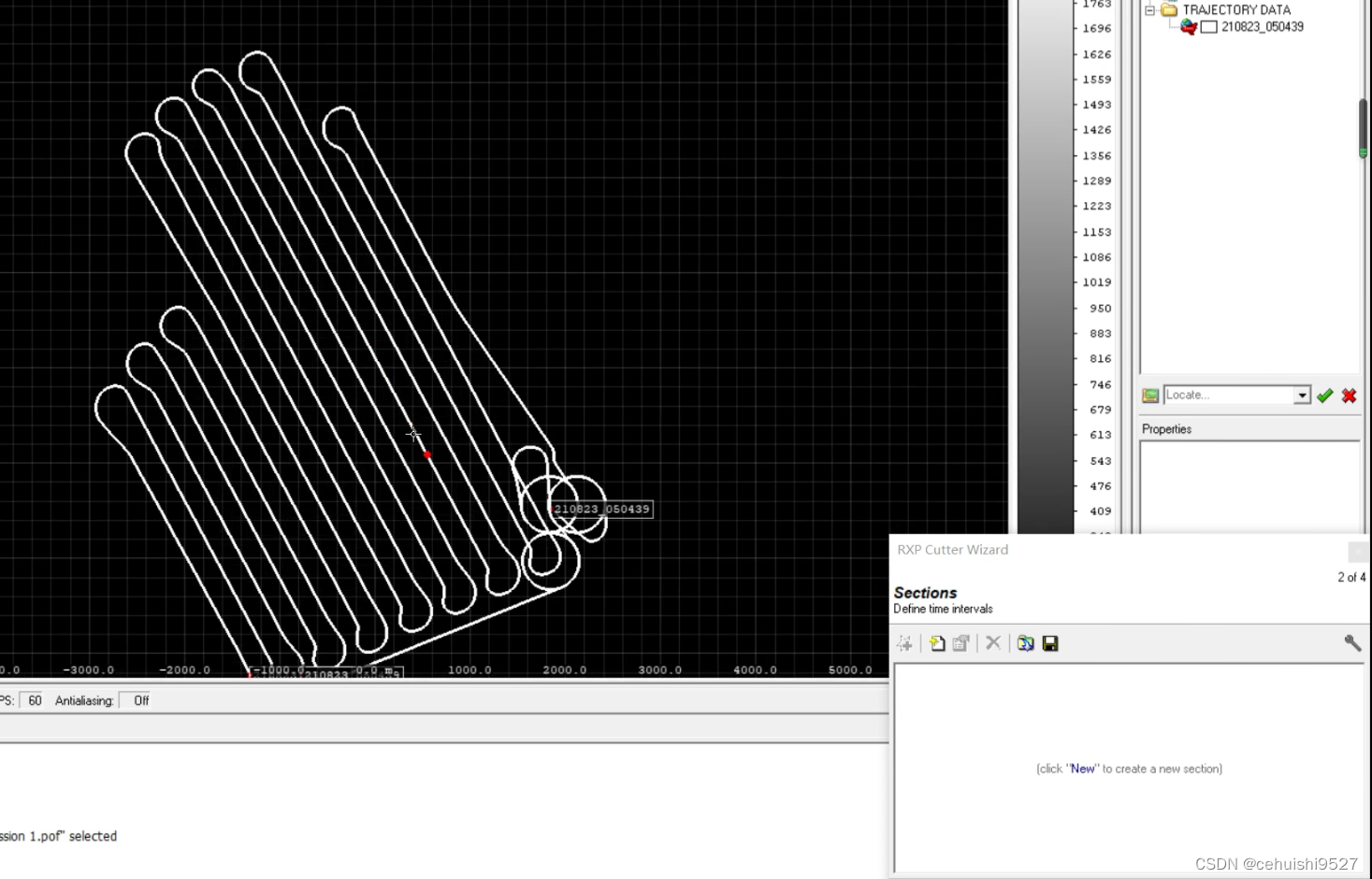
选定保留的航线,删除没用的航线,例如飞机拐弯的区域数据,只保留航线范围内的直线有效数据即可

处理运行的界面,这个时间比较漫长

运行结束

合并切割完的rxp文件

合并pos文件

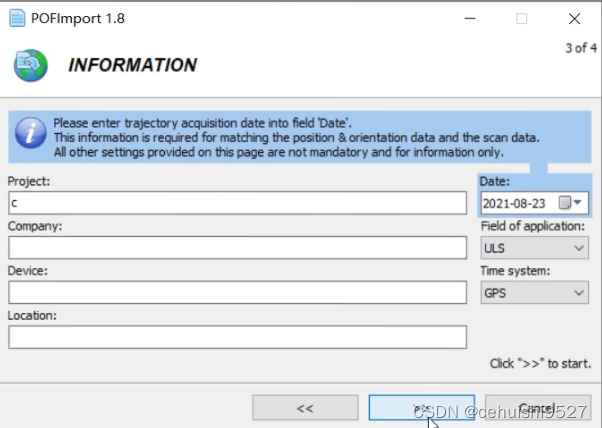
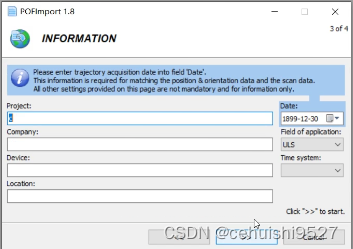
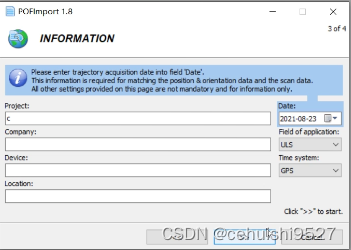
2.6第n架次导入
这次导入的数据是无法自动识别时间的,所以需要人为的调整,调整日期,时间类型GPS设置即可
F2选择导入的轨迹修改名称
![]()
导入rxp数据,第2架次的文件
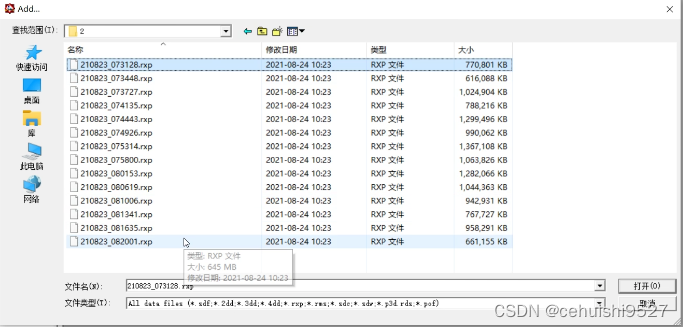
新建records,新建组,把第二架次的RXP文件保存在一个组下,便于管理
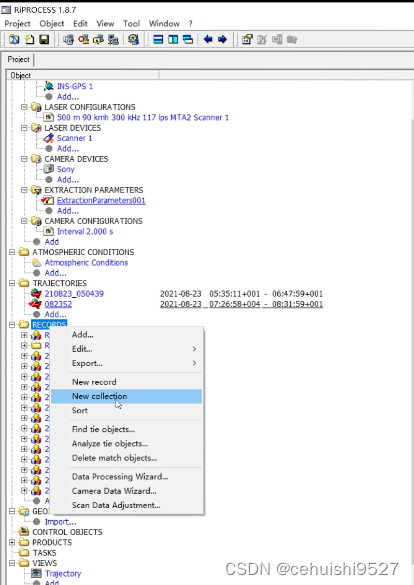
移动方式为全选拖动到新建的文件夹中,这个过程有点慢,请耐心等待

2.6设置参数
本过程是在轨迹 导入完成之后,设置相关的参数

项目区域为水域或者电力线的时候multiple time around(多次循环)选择fixed in zone,正常的是选择auto模式

设置感兴趣区域,按时间
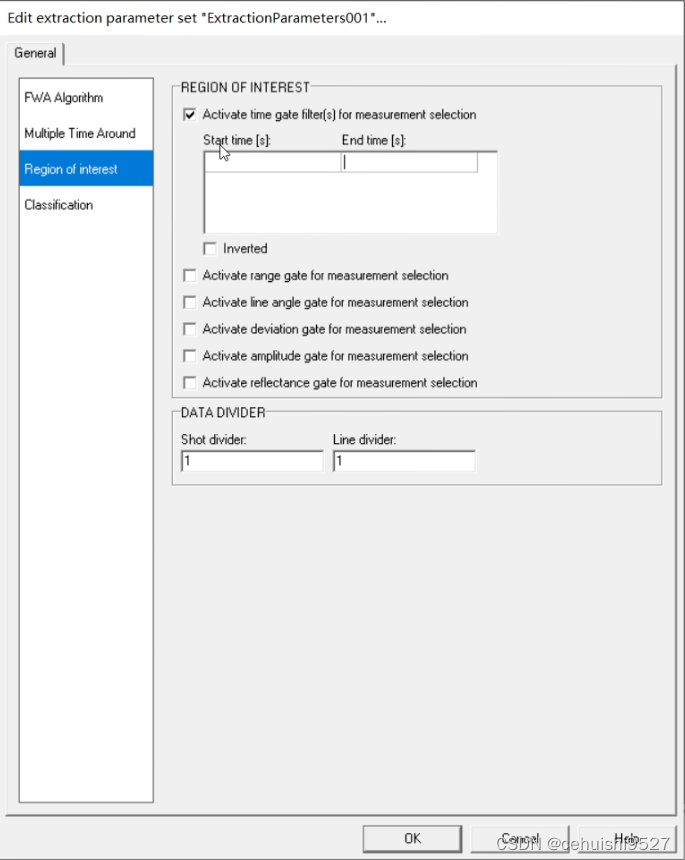
设置感兴趣区域,按距离,修改的参数是最小50米,最大1500米,这个区间的数据是参与解算有效数据,其他的默认为无效的数据不参与解算,也就是所谓的噪点。

设置感兴趣区域,按角度,针对一些360转动的激光器,240为固定下视75°,所以不存在角度设置兴趣区域

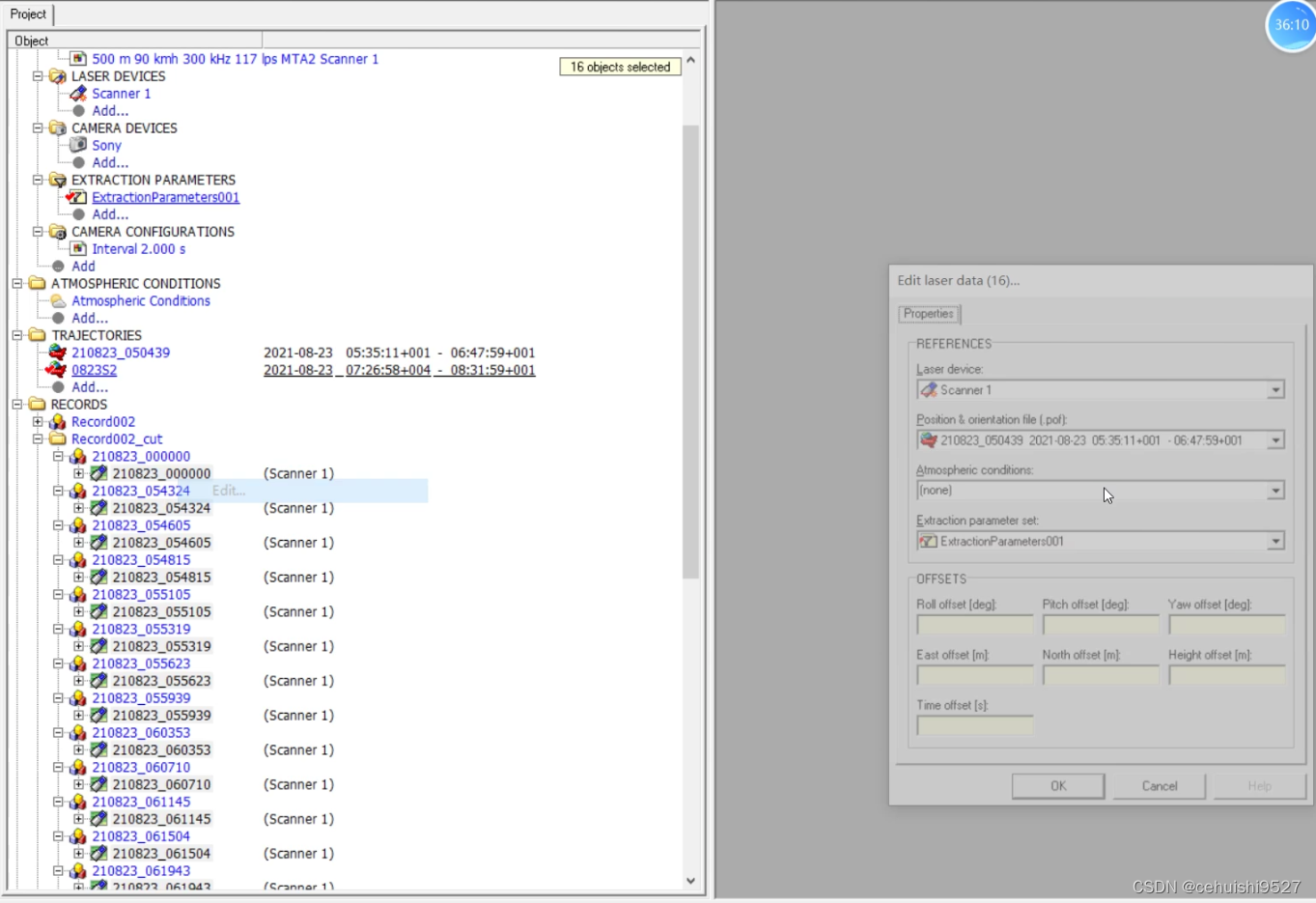
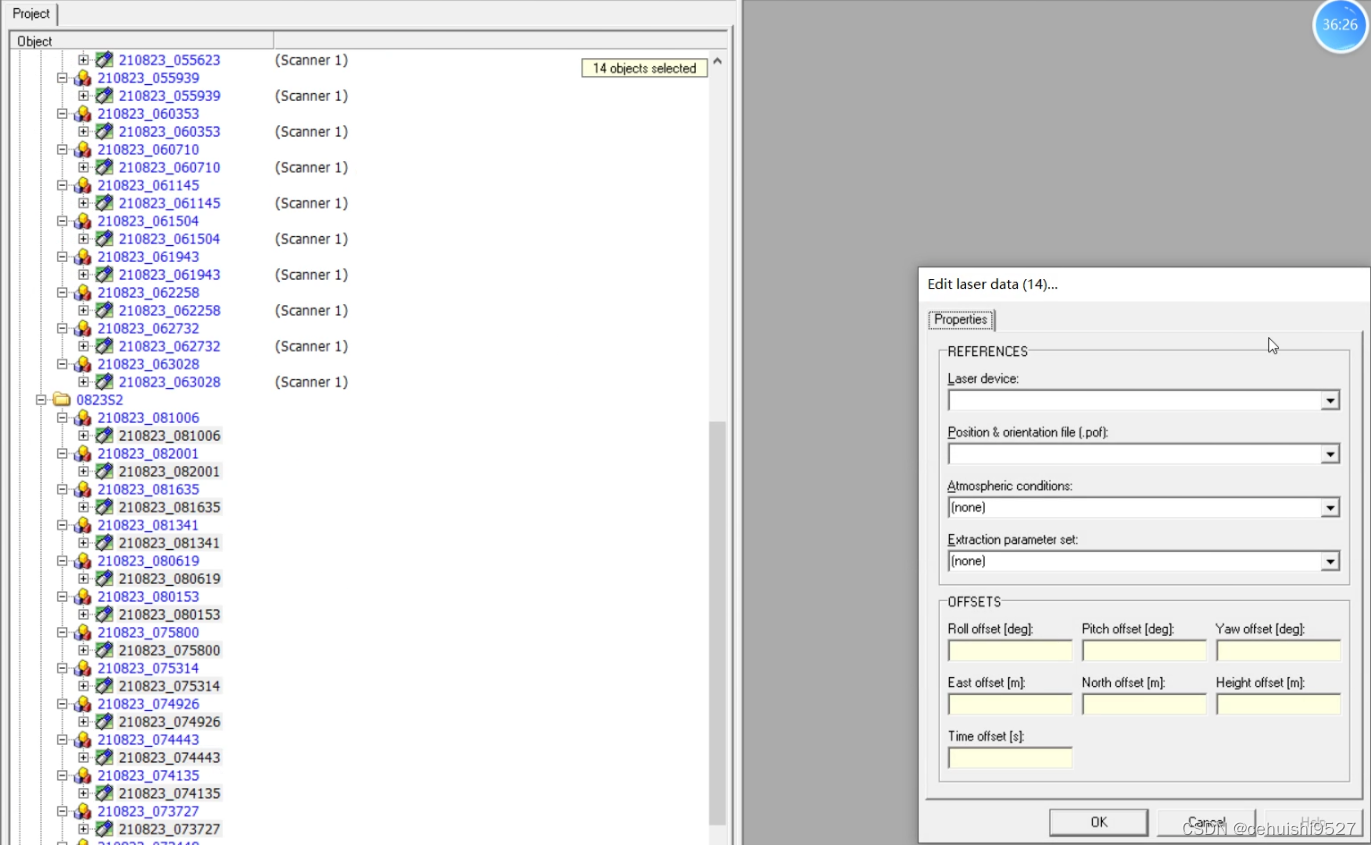
2.7轨迹关联
选择数据文件,右键编辑,弹出编辑关联窗口,第一架次默认关联的轨迹,主要是设置导入的第二架次的文件
第二架次打开之后的界面
2.8编辑工程
这一步相当于重新定义数据的范围
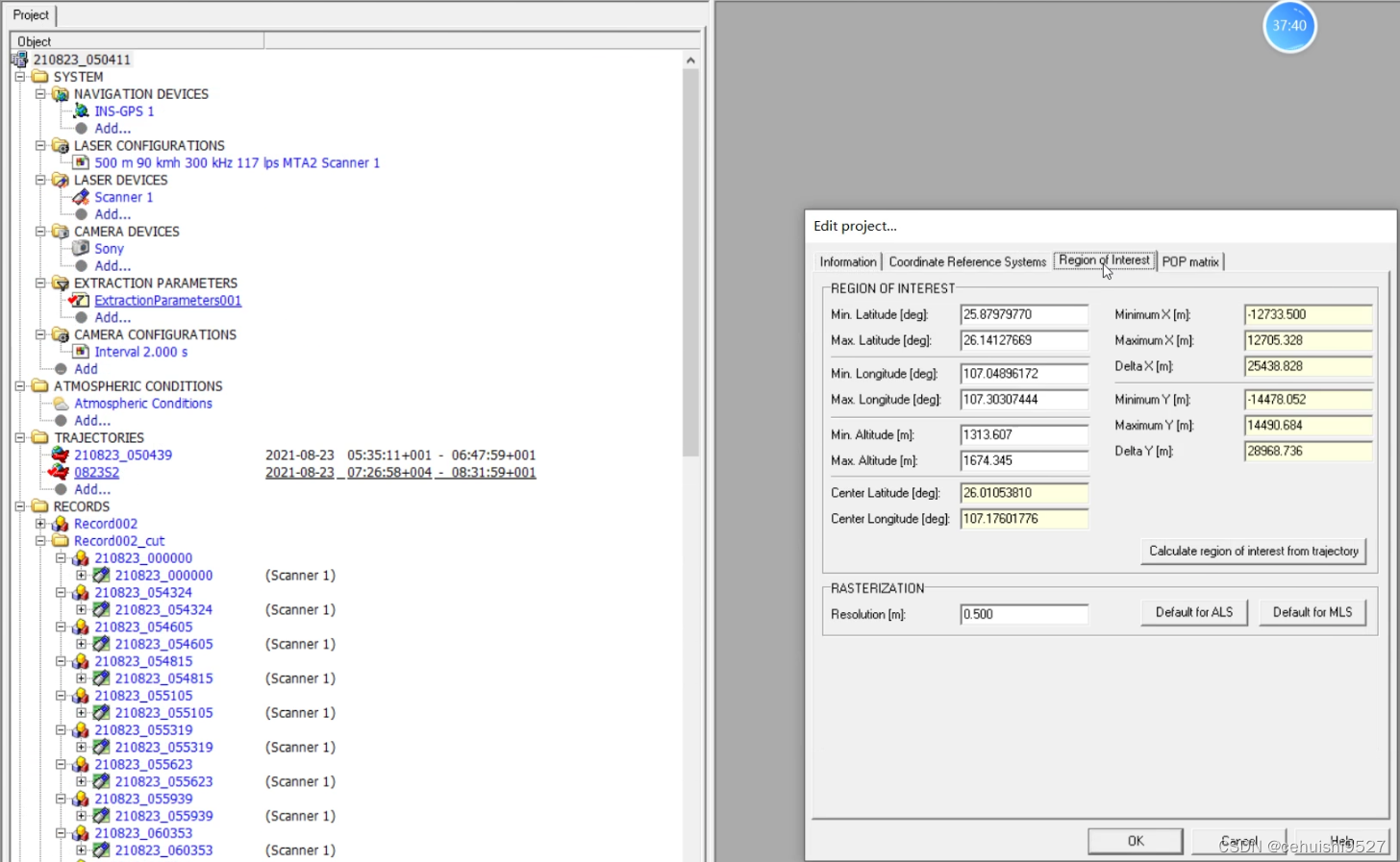
region of interest(感兴趣区域)根据轨迹计算兴趣区域按键
![]()

2.9工程解算
正式进入数据解算的过程

解算界面
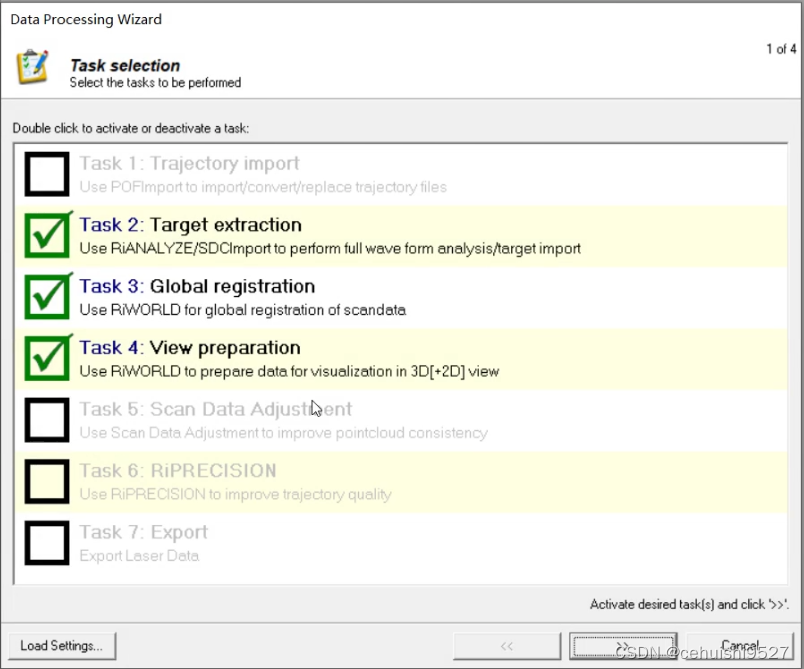
默认界面

2.10成果检查
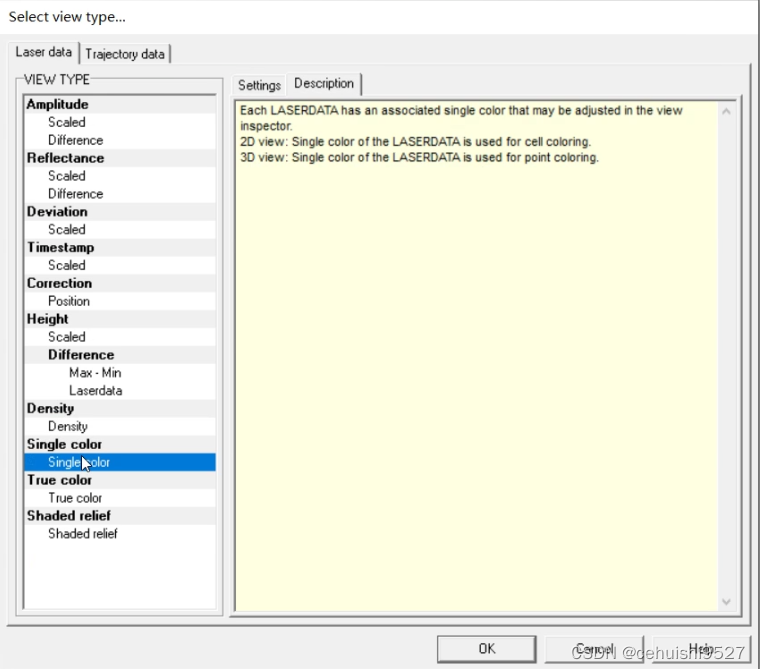
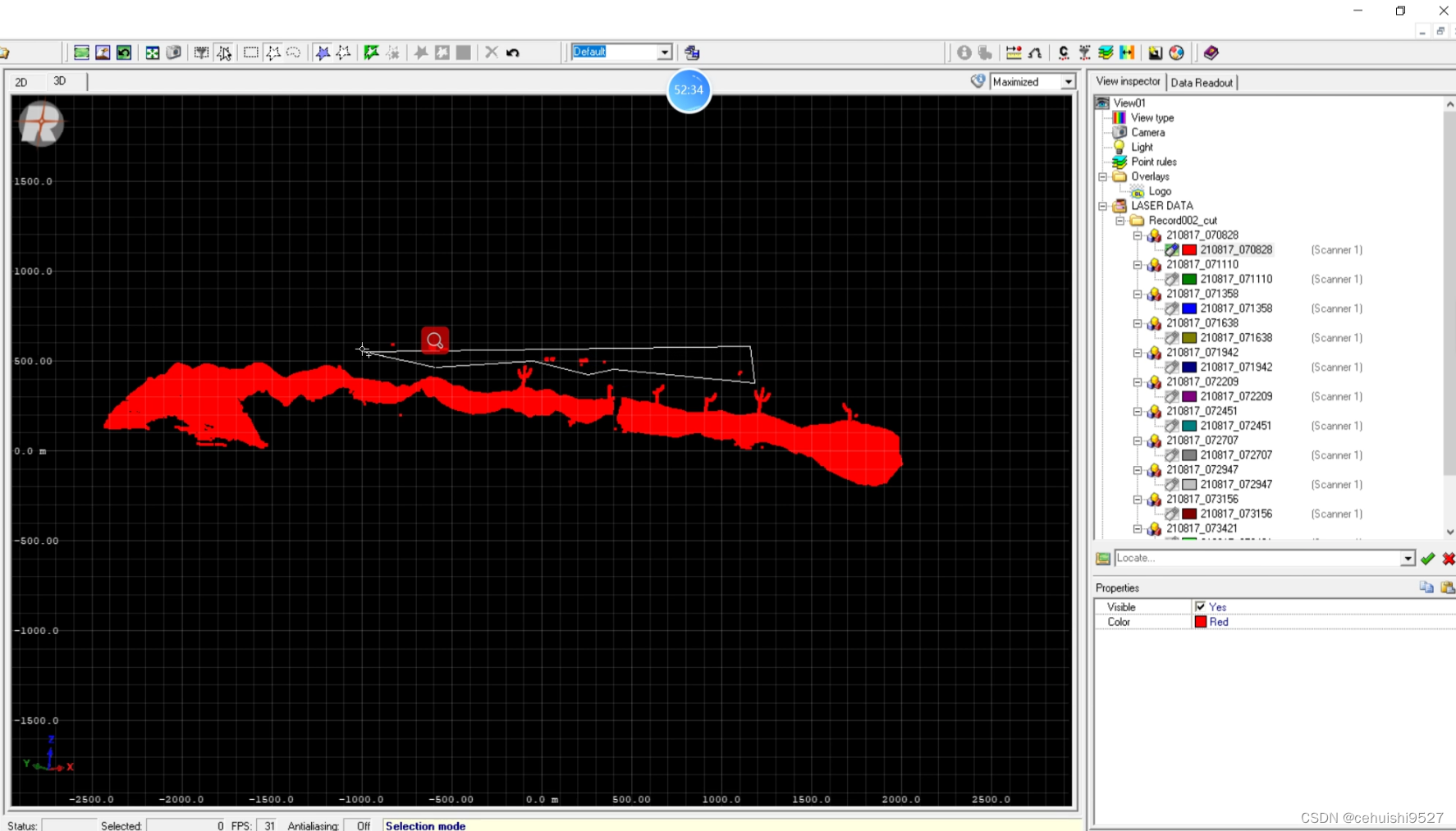
新建视图-select view type-single color(单颜色显示)
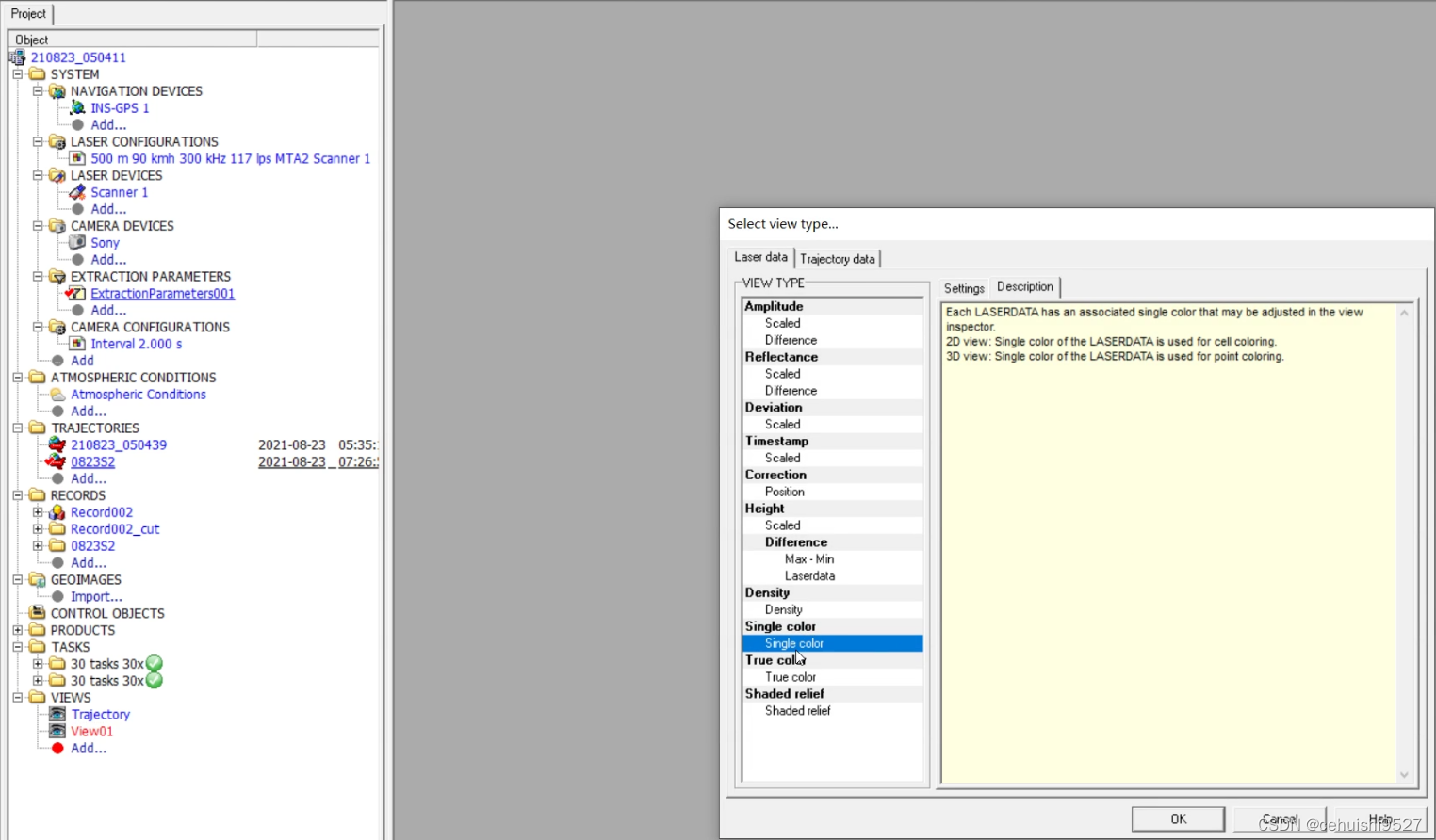
成果直接拖进去显示界面,显示效果如下

找一个道路区域,查看点云分层严重不严重,点击截面工具(alt+左键选中+滚轮调节宽度+右键结束)
![]()
不同颜色的代表不同的航带数据
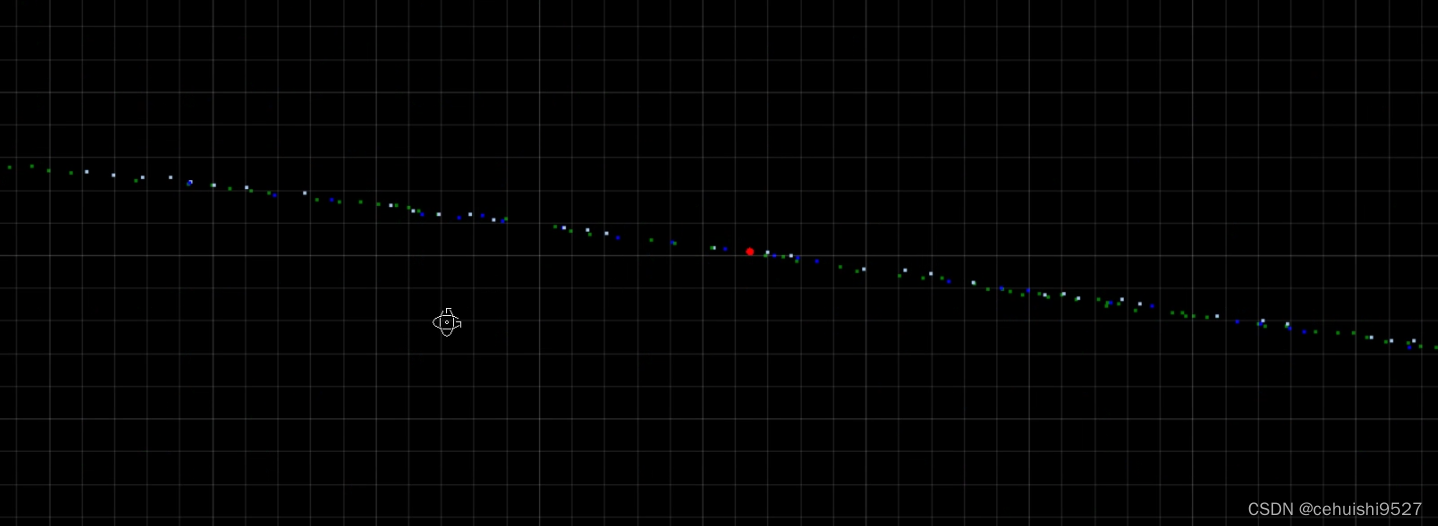
正常的数据在15cm之内是比较好的数据,本次的数据为1cm,这样的数据是非常不错的

找一个房屋区域查看,差距为10cm

2.11数据导出

导出界面,其中的合并数据取消

三、精细化处理
3.1数据查看
轨迹数据的时间需要覆盖RXP点云采集数据的时间,否则就会不成功

3.2sdc文件和riworld
先生成sdc文件,然后生成riworld文件,这两个数据不会颠倒
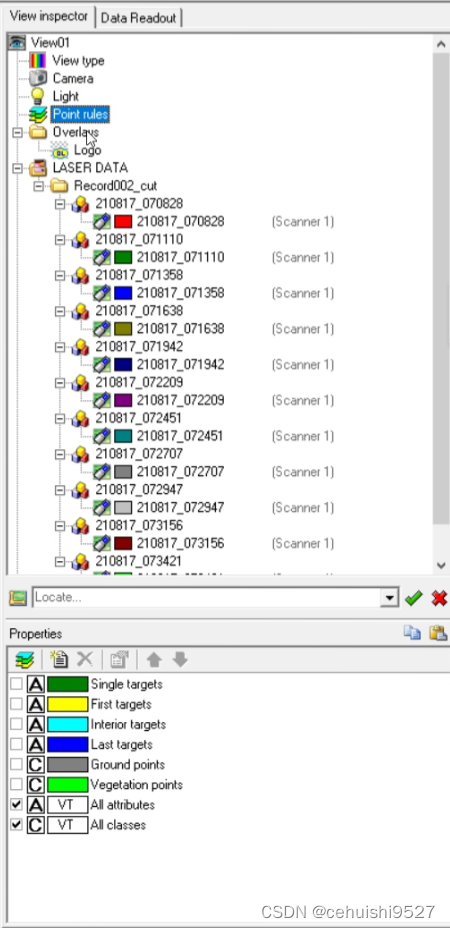
3.3显示类别
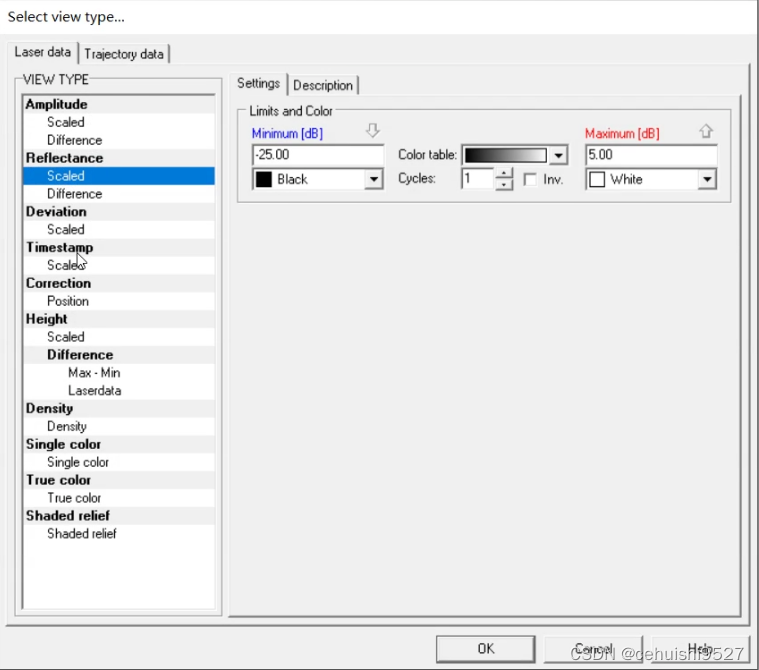
按反射率显示
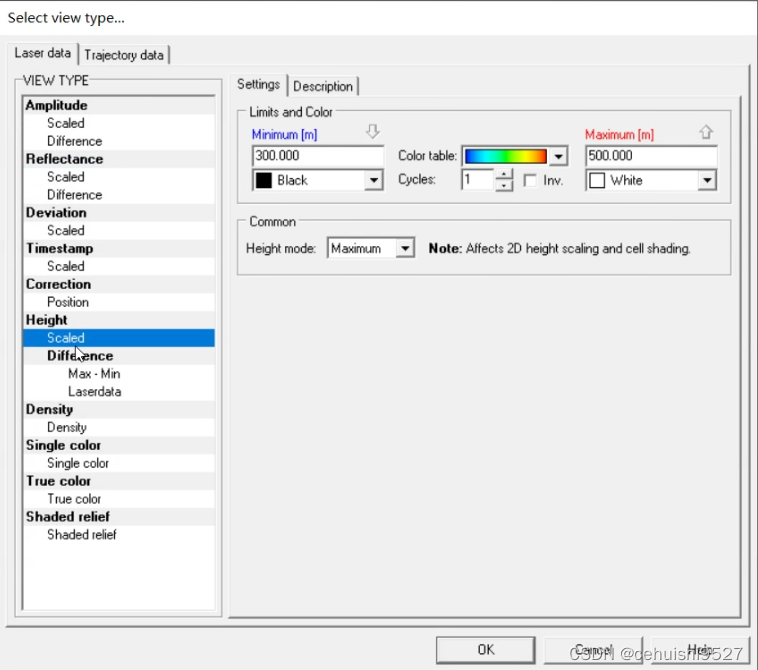
按高程显示
按点密度显示

单颜色显示
显示图层
3.4人工删除
单条航带显示数据人工删除噪点,左键开始,右键结束
3.5查看分层
(alt+左键选中+滚轮调节宽度+右键结束)

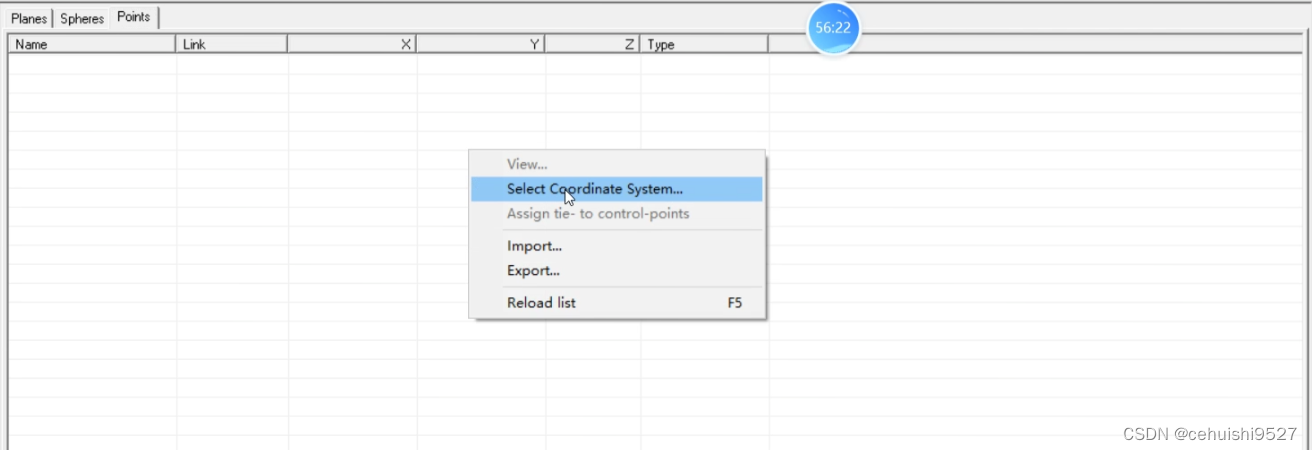
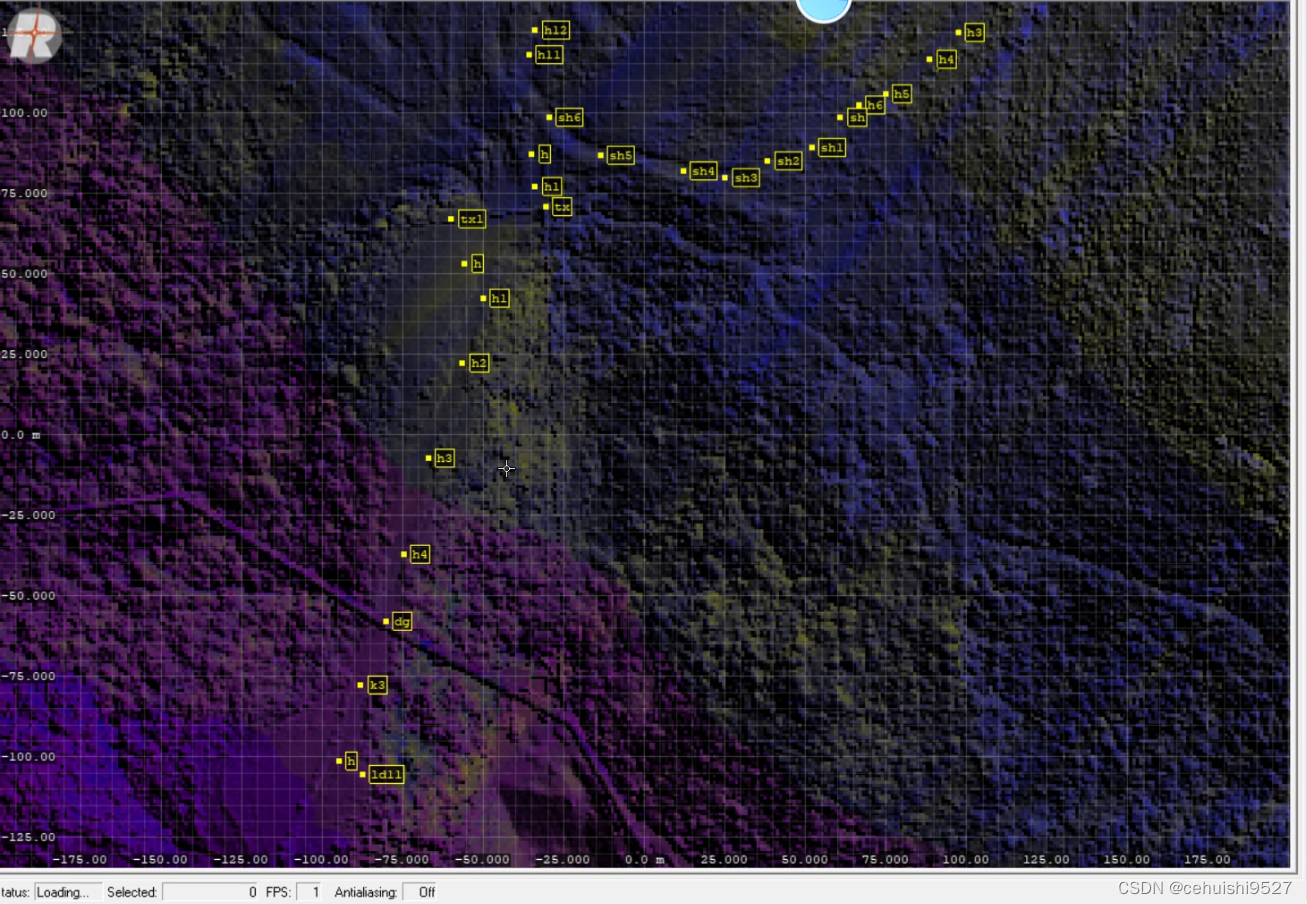
3.6控制点导入

3.7航带拼接
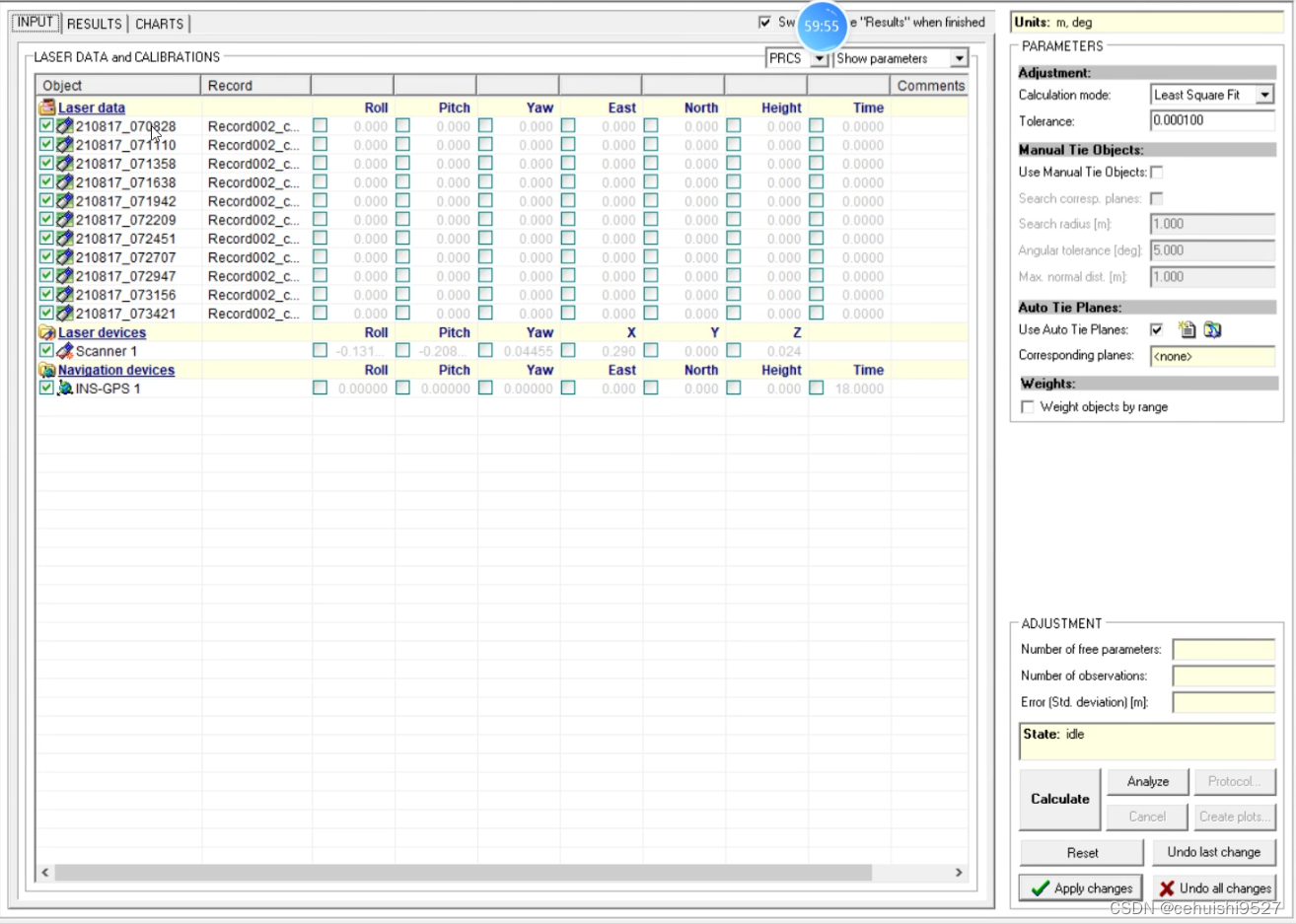
数据拼接的关键步骤:先找共同面,针对找面进行参数设置,找到面之后才可以拼接

点击中间的图标
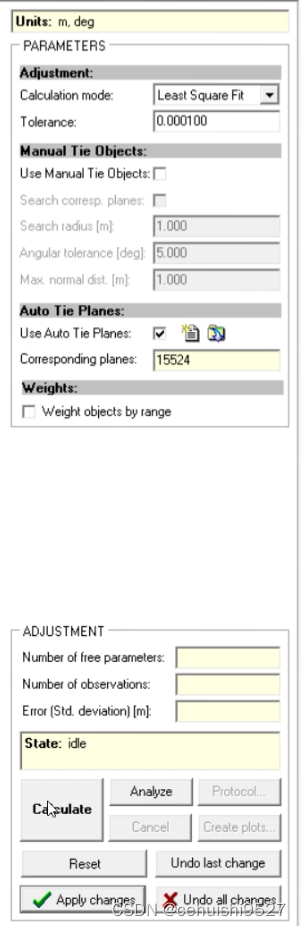
弹出界面如下
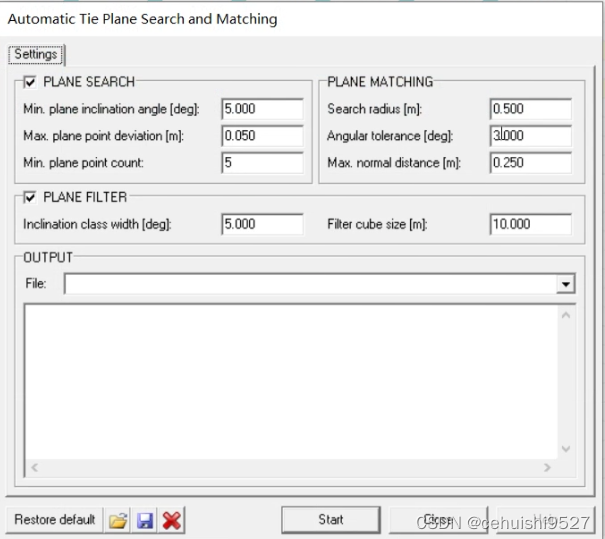
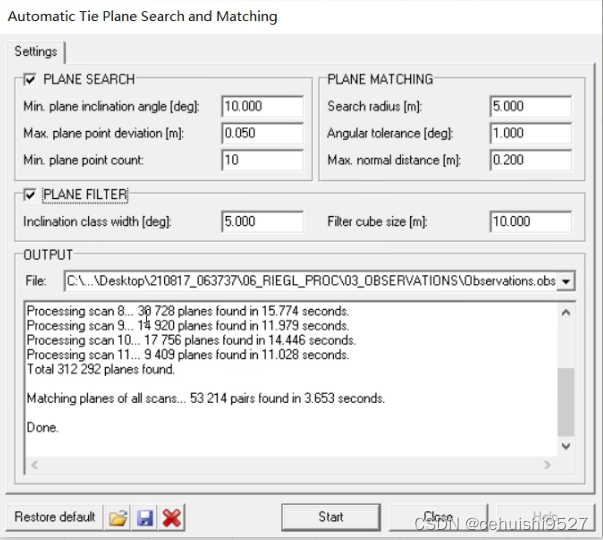
寻找面:航带间角度10°;点和点之间的距离为5cm;多少个点形成面=5个
设置面:查找半径=0.5米;角公差(法线的距离)=1米;最大的平面距离=0.2米


默认的参数

开始寻找,最后会统计发现的面,和总共使用的时间

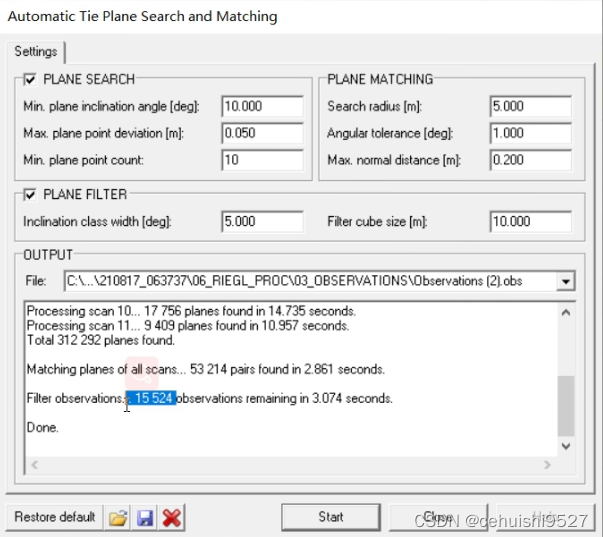
对面进行删选,就会精简好多面
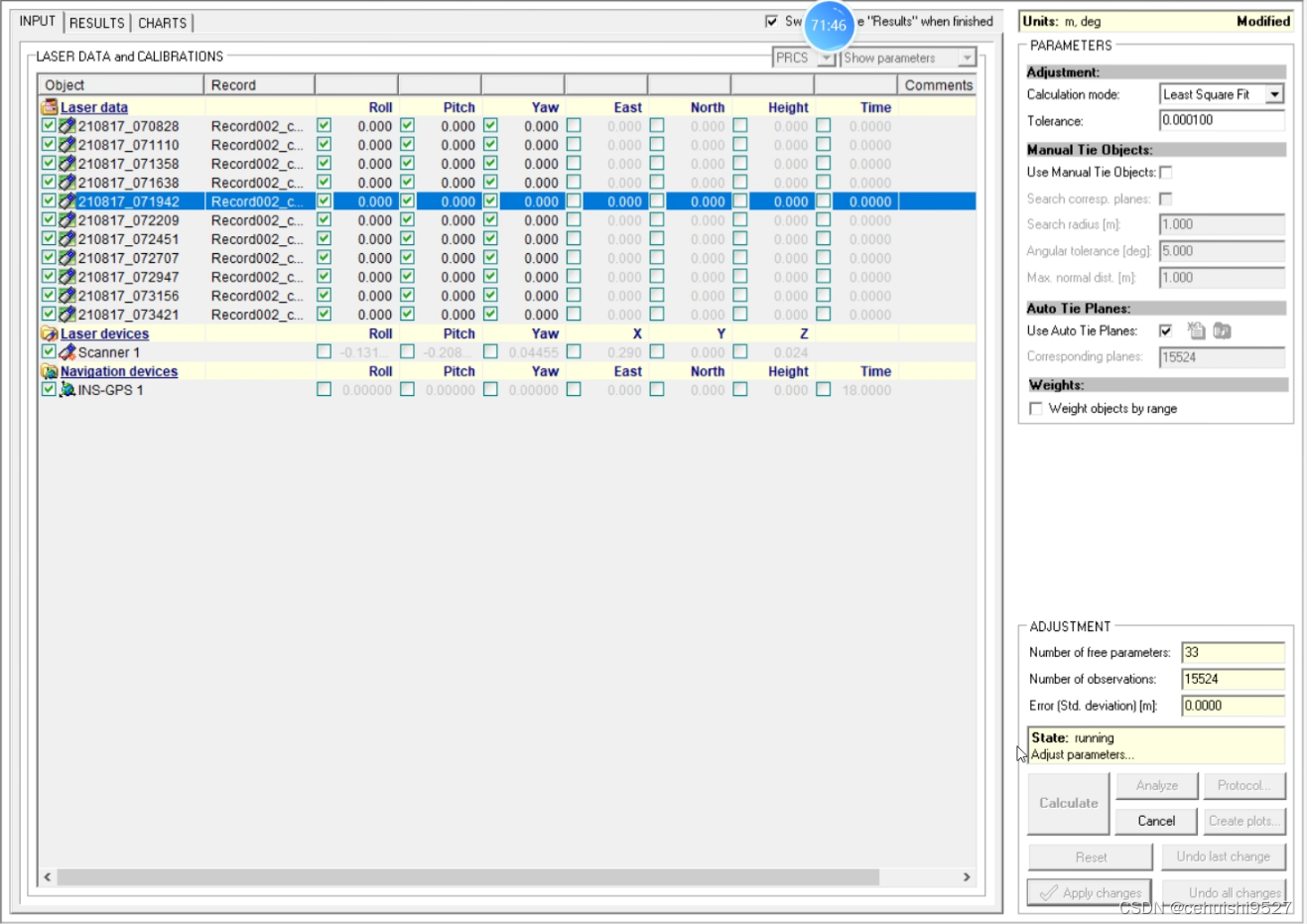
重新处理之后,面的数量53214简化到了15524.
处理数据,处理roll,pitch,yaw数据

然后calculate开始运行
计算结果

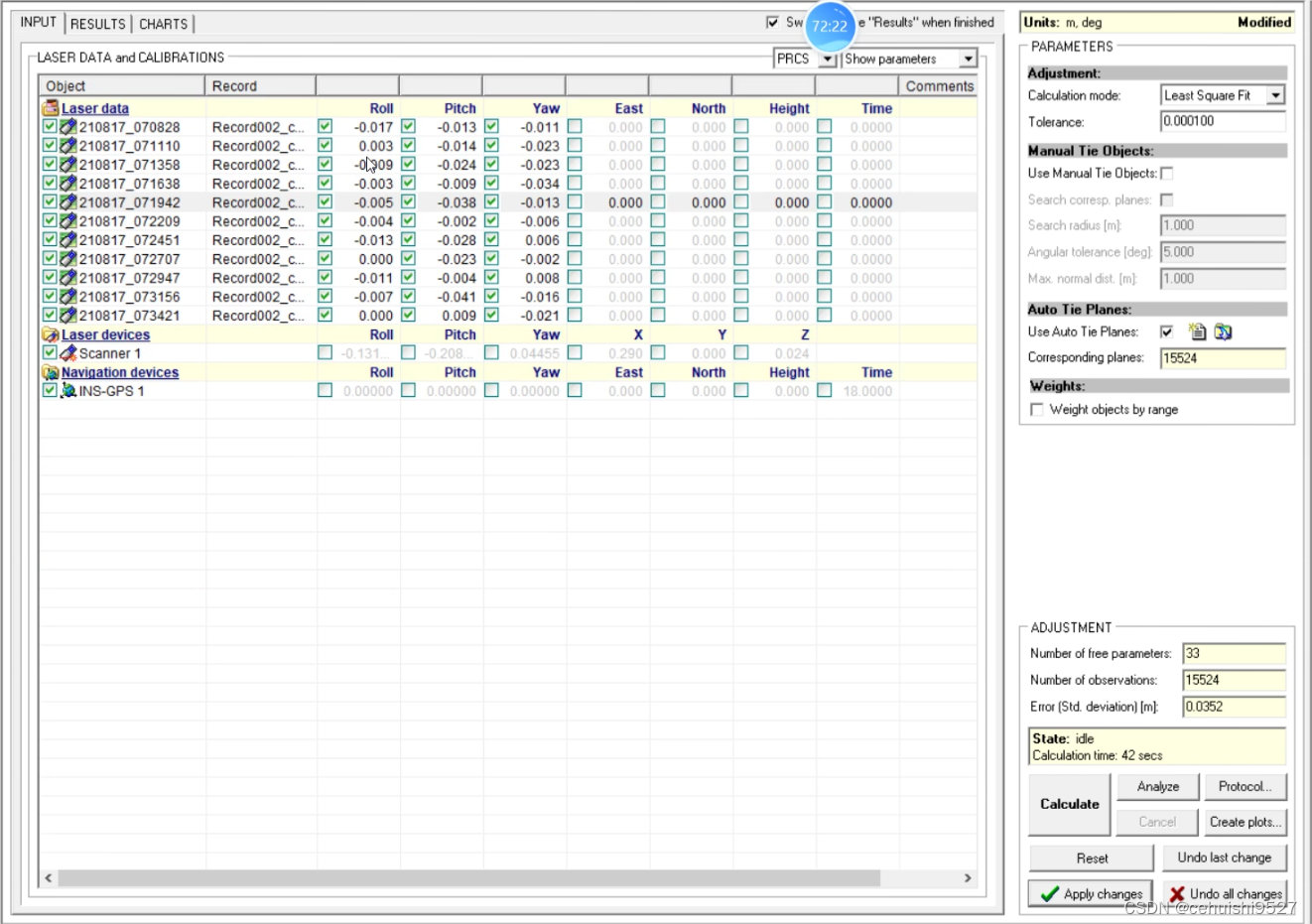
处理east,north,height数据
给一个限制条件

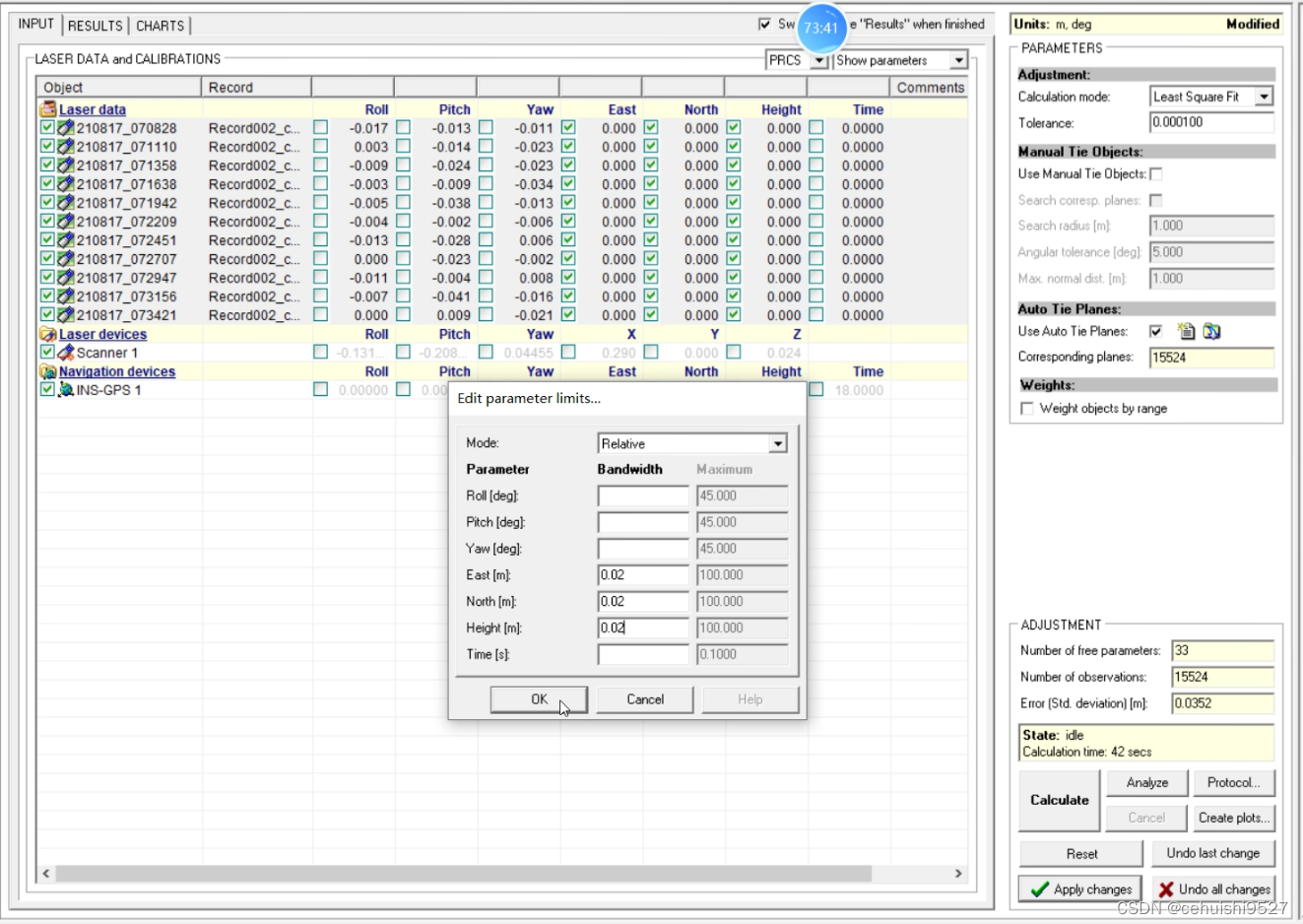
重新运行calculate,结果
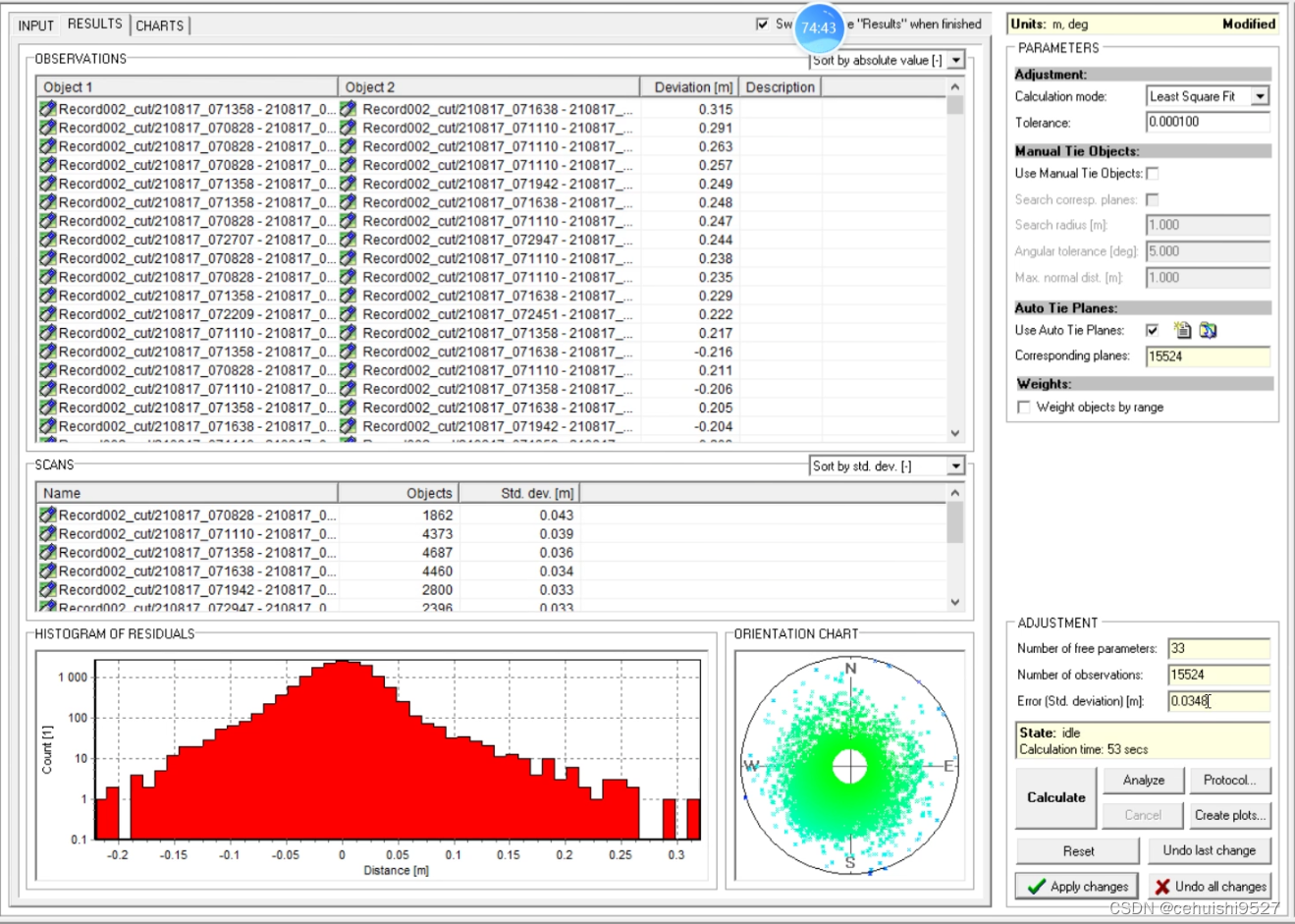
此时的结果显示误差为0.0348,且正态分布的图像不连贯,说明数据是有问题的

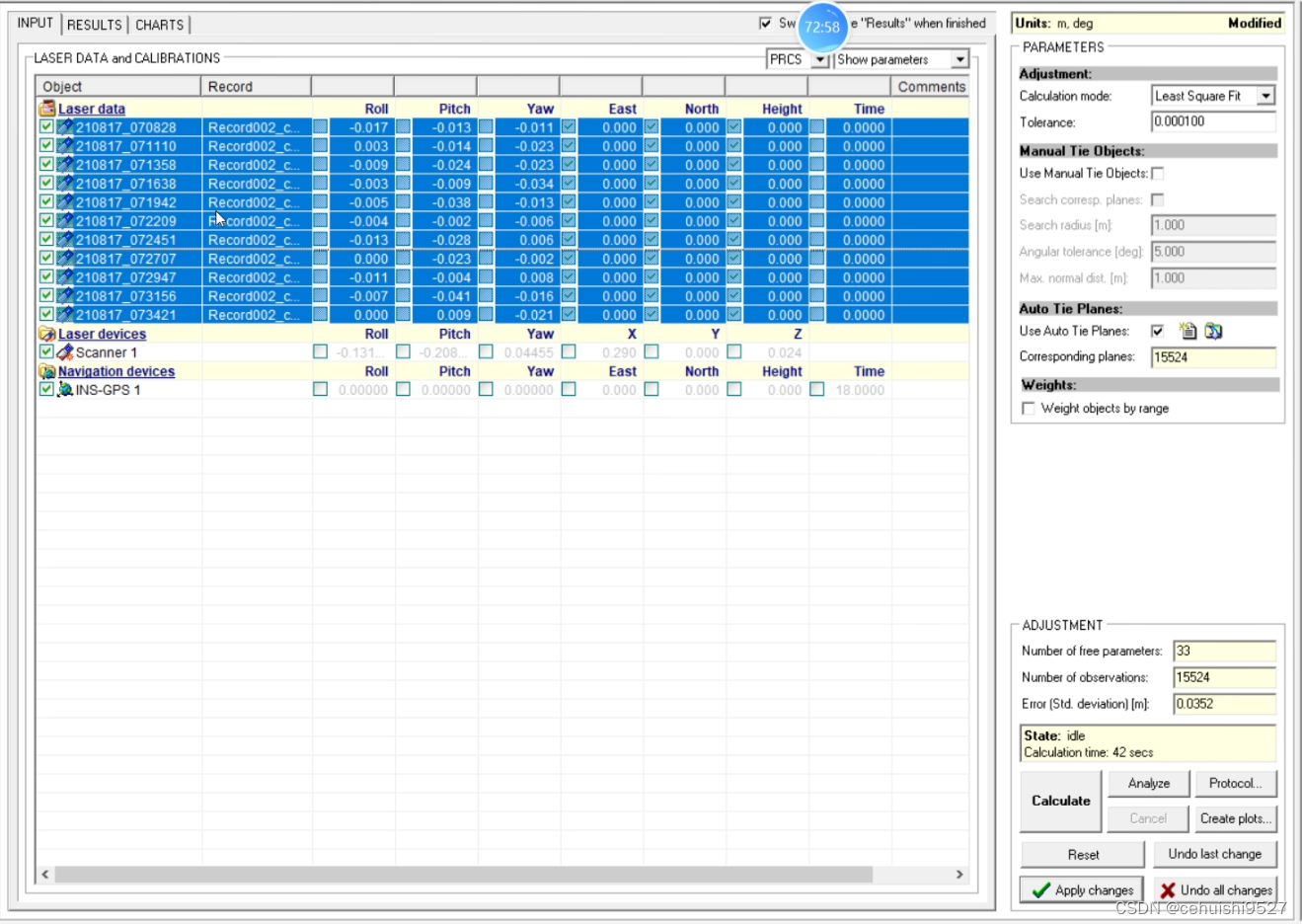
roll,pitch,yaw,east,north,height全选中第三次运行calculate,结果

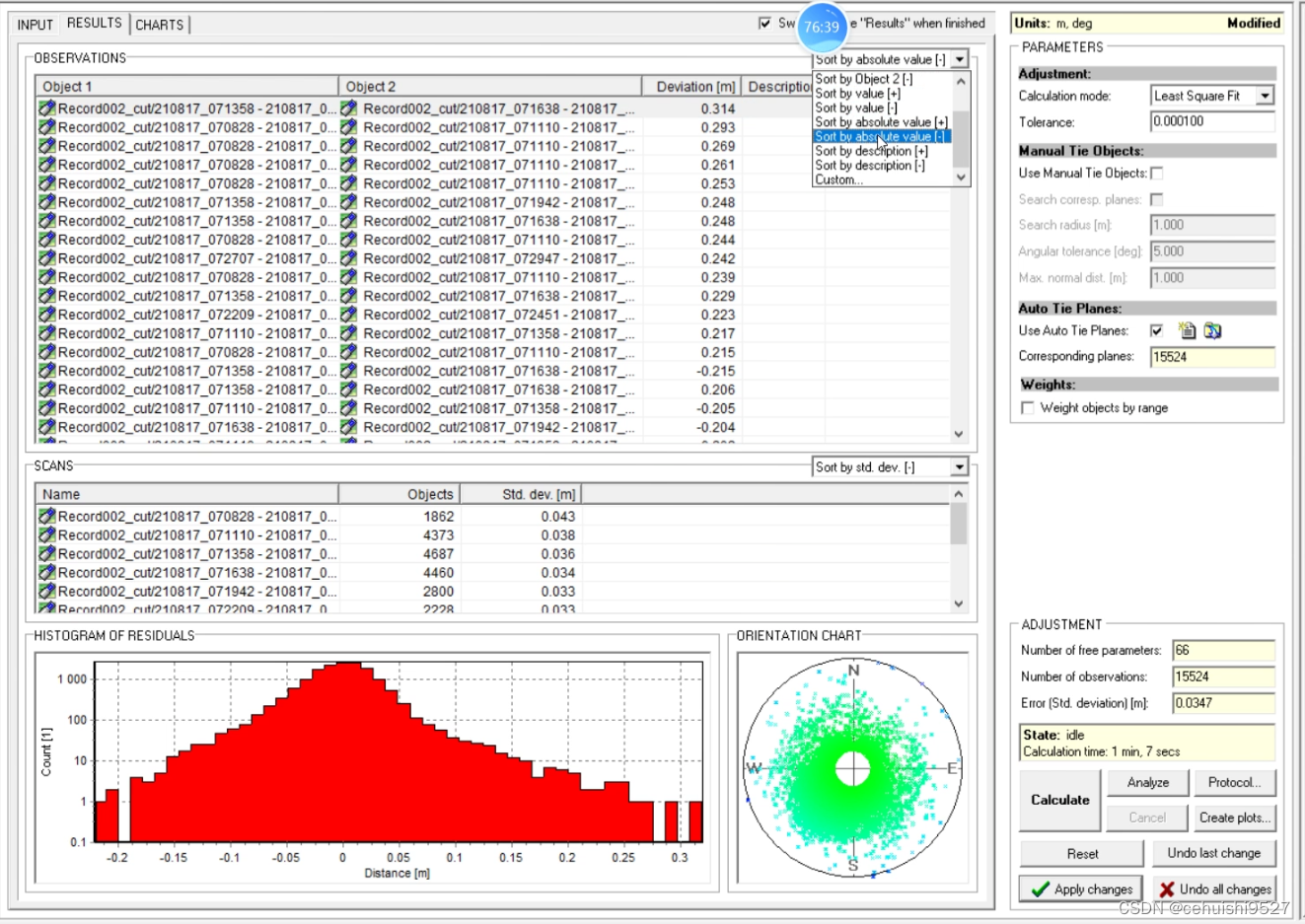
清楚不好的数据,deviation(偏差值)不连贯的数字清除掉。
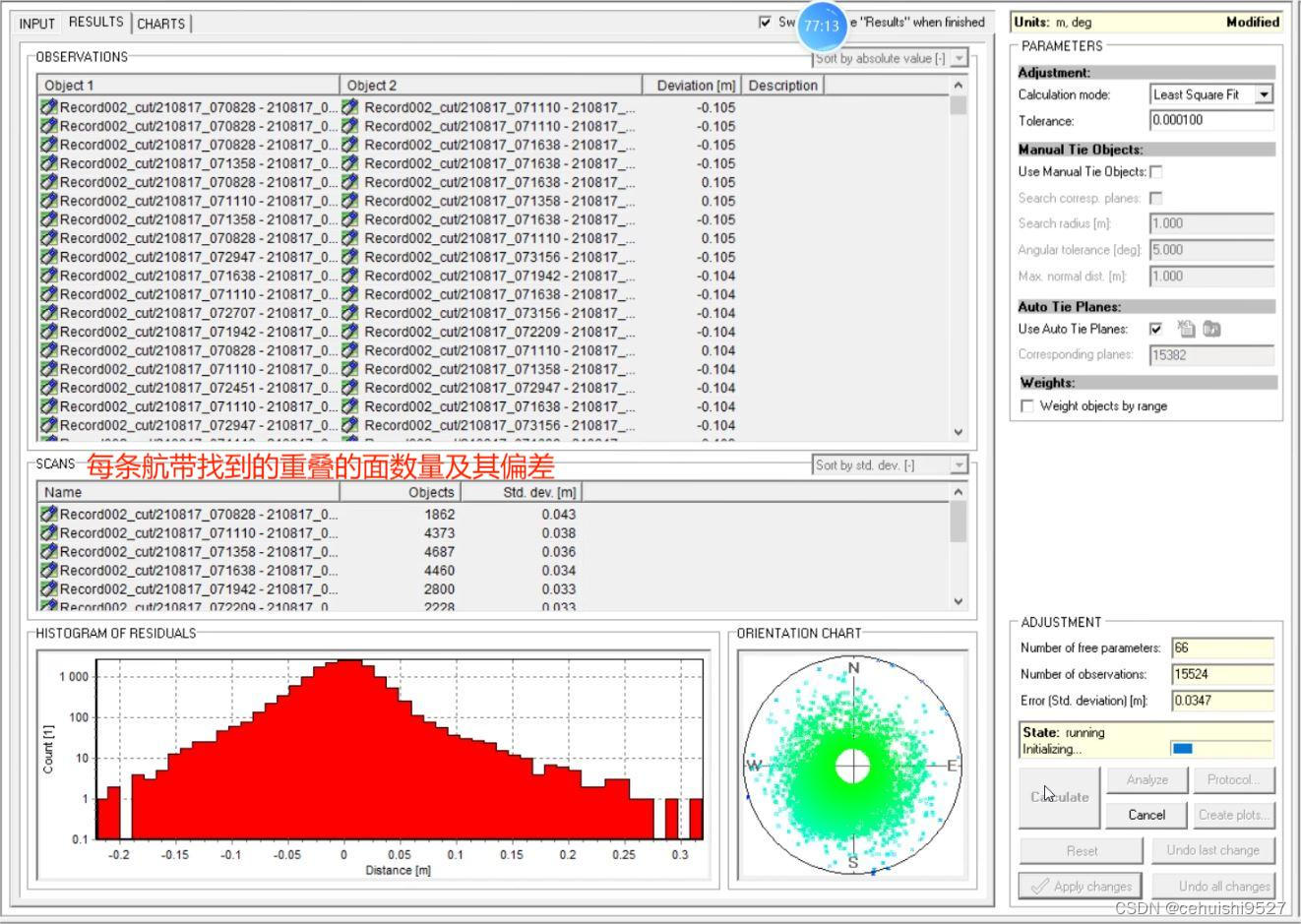
第四次运行calculate

error值经过四次迭代计算,越来越小,选择apply changes,参数重新写入数据中,完成航带拼接,此时结算第一遍的数据已经消失了,下面进行第二遍数据的解算。
3.8点云距离计算

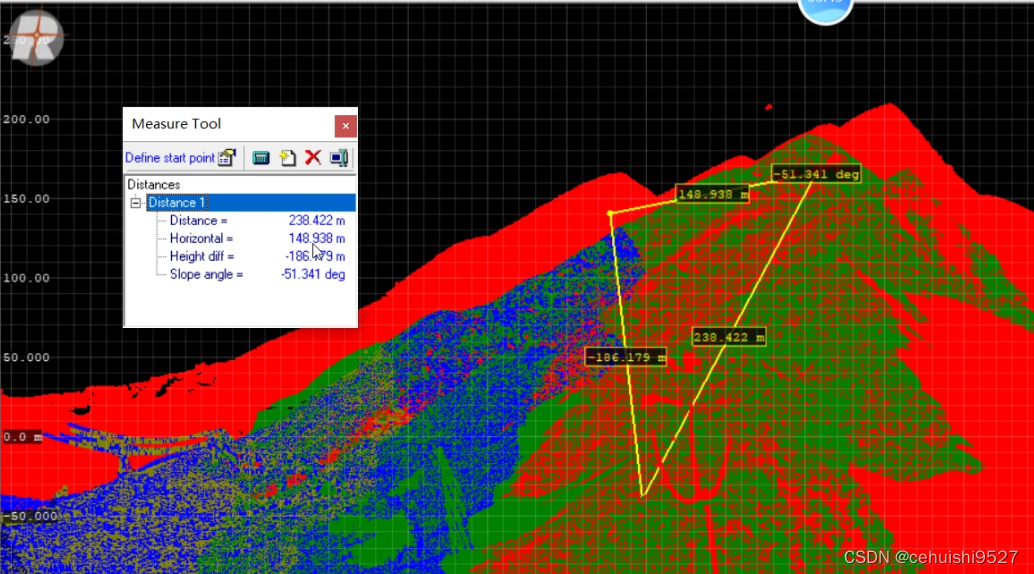
新建距离图层保留新量测的数据
3.9点云分类




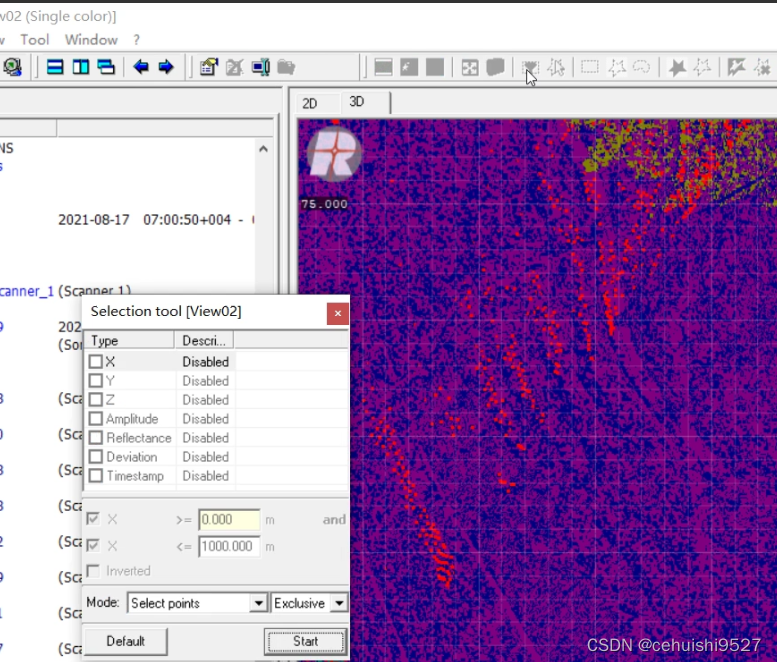
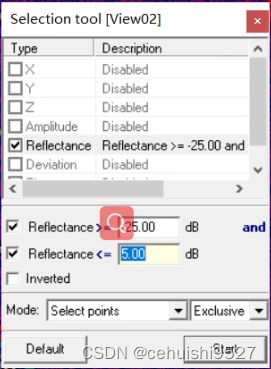
3.10选择工具
可以更具不同的属性值选择点云,例如利用DB值选择噪点
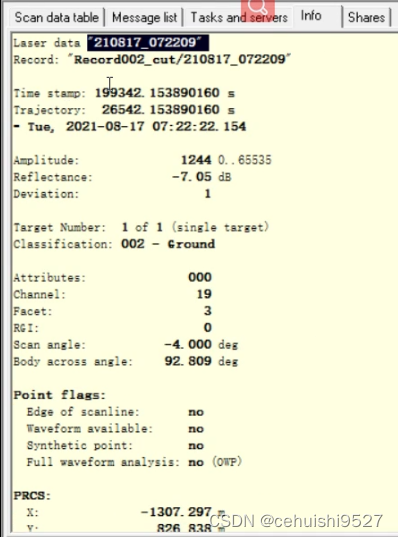
点云信息查看,单个点云数据的详细信息
3.11去噪点

弹出窗口
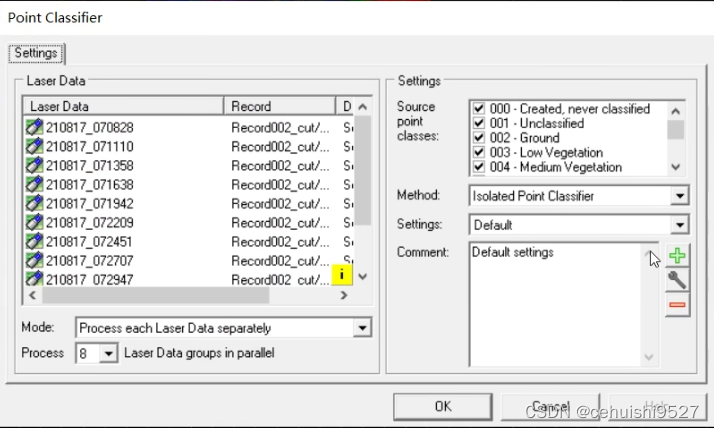
孤立点设置

全选图层,选择ok,开始分类孤立点
图层查看
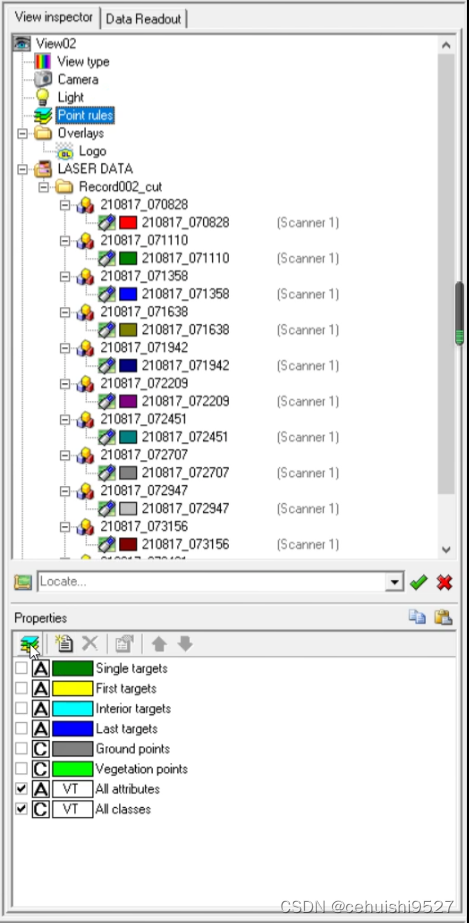
新建图层


















 9357
9357











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











