







- 转载请注明作者和出处:http://blog.csdn.net/u011475210
- 代码地址:https://github.com/WordZzzz/fisheye_calibration
- 软件版本:VS2013+OPENCV2.4.13 OR VS2013+OPENCV3.4.0
- 编 者:WordZzzz
我的代码
最近在整理自己以前做过的一些东西,这是基于opencv的鱼眼摄像头畸变校正程序的github地址。
其中:
- normal_calibrate:基于OPENCV2与OPENCV3通用的函数实现,可实现USB摄像头实时畸变校正;
- fishey_calibrate:基于OPENCV3独有的fishyey结构体实现,可实现USB摄像头实时畸变校正;
- fishey_calibrate_img:基于OPENCV3独有的fishyey结构体实现,可实现单张图片畸变校正;
opencv1.0 2.0版只有一种摄像机标定模型,就是普通的小孔成像模型,在cv::空间下。而从opencv3.0开始,新增了一种鱼眼相机标定模型,在fisheye::空间下。两种模型的主要区别在于像与物的投影关系不同,具体的文献资料依然是数不胜数,这里就不赘述。根据opencv官方文档的建议,在畸变程度较大的广角镜头(比如:鱼眼镜头)上进行摄像机标定和畸变校正,最好是用fisheye模型,该模型在图像边缘畸变程度很大的地方比普通相机模型的效果要好。
当然,还是要贴上官方文档的:
华丽的分割线
可供参考资料
以下是在写这篇博客的时候偶然发现的对opencv两个版本标定过程的讲解,这里直接copy过来并稍微做了一下排版,因为自己忙于为找工作做准备,实在是没时间自己整理了。原文链接。
图像算法中会经常用到摄像机的畸变校正,有必要总结分析OpenCV中畸变校正方法,其中包括普通针孔相机模型和鱼眼相机模型fisheye两种畸变校正方法。
普通相机模型畸变校正函数针对OpenCV中的cv::initUndistortRectifyMap(),鱼眼相机模型畸变校正函数对应OpenCV中的cv::fisheye::initUndistortRectifyMap()。两种方法算出映射Mapx和Mapy后,统一用cv::Remap()函数进行插值得到校正后的图像。
FishEye模型的畸变校正。
方便起见,直接贴出OpenCV源码,我在里面加了注释说明。建议参考OpenCV官方文档看畸变模型原理会更清楚。
简要流程就是:
1.求内参矩阵的逆,由于摄像机坐标系的三维点到二维图像平面,需要乘以旋转矩阵R和内参矩阵K。那么反向投影回去则是二维图像坐标乘以 K*R的逆矩阵。
2.将目标图像中的每一个像素点坐标(j,i),乘以1中求出的逆矩阵iR,转换到摄像机坐标系(_x,_y,_w),并归一化得到z=1平面下的三维坐标(x,y,1)。
3.求出平面模型下像素点对应鱼眼半球模型下的极坐标(r, theta)。
4.利用鱼眼畸变模型求出拥有畸变时像素点对应的theta_d。
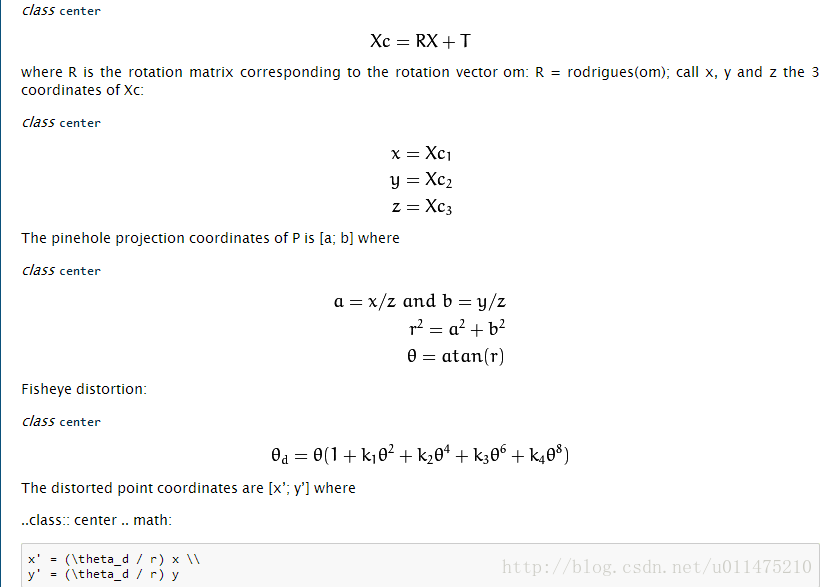
5.利用求出的theta_d值将三维坐标点重投影到二维图像平面得到(u,v),(u,v)即为目标图像对应的畸变图像中像素点坐标。
6.使用cv::Remap()函数,根据mapx,mapy取出对应坐标位置的像素值赋值给目标图像,一般采用双线性插值法,得到畸变校正后的目标图像。
#include <opencv2\opencv.hpp>
void cv::fisheye::initUndistortRectifyMap( InputArray K, InputArray D, InputArray R, InputArray P,
const cv::Size& size, int m1type, OutputArray map1, OutputArray map2 )
{
CV_Assert( m1type == CV_16SC2 || m1type == CV_32F || m1type <=0 );
map1.create( size, m1type <= 0 ? CV_16SC2 : m1type );
map2.create( size, map1.type() == CV_16SC2 ? CV_16UC1 : CV_32F );
CV_Assert((K.depth() == CV_32F || K.depth() == CV_64F) && (D.depth() == CV_32F || D.depth() == CV_64F));
CV_Assert((P.empty() || P.depth() == CV_32F || P.depth() == CV_64F) && (R.empty() || R.depth() == CV_32F || R.depth() == CV_64F));
CV_Assert(K.size() == Size(3, 3) && (D.empty() || D.total() == 4));
CV_Assert(R.empty() || R.size() == Size(3, 3) || R.total() * R.channels() == 3);
CV_Assert(P.empty() || P.size() == Size(3, 3) || P.size() == Size(4, 3));
//从内参矩阵K中取出归一化焦距fx,fy; cx,cy
cv::Vec2d f, c;
if (K.depth() == CV_32F)
{
Matx33f camMat = K.getMat();
f = Vec2f(camMat(0, 0), camMat(1, 1));
c = Vec2f(camMat(0, 2), camMat(1, 2));
}
else
{
Matx33d camMat = K.getMat();
f = Vec2d(camMat(0, 0), camMat(1, 1));
c = Vec2d(camMat(0, 2), camMat(1, 2));
}
//从畸变系数矩阵D中取出畸变系数k1,k2,k3,k4
Vec4d k = Vec4d::all(0);
if (!D.empty())
k = D.depth() == CV_32F ? (Vec4d)*D.getMat().ptr<Vec4f>(): *D.getMat().ptr<Vec4d>();
//旋转矩阵RR转换数据类型为CV_64F,如果不需要旋转,则RR为单位阵
cv::Matx33d RR = cv::Matx33d::eye();
if (!R.empty() && R.total() * R.channels() == 3)
{
cv::Vec3d rvec;
R.getMat().convertTo(rvec, CV_64F);
RR = Affine3d(rvec).rotation();
}
else if (!R.empty() && R.size() == Size(3, 3))
R.getMat().convertTo(RR, CV_64F);
//新的内参矩阵PP转换数据类型为CV_64F
cv::Matx33d PP = cv::Matx33d::eye();
if (!P.empty())
P.getMat().colRange(0, 3).convertTo(PP, CV_64F);
//关键一步:新的内参矩阵*旋转矩阵,然后利用SVD分解求出逆矩阵iR,后面用到
cv::Matx33d iR = (PP * RR).inv(cv::DECOMP_SVD);
//反向映射,遍历目标图像所有像素位置,找到畸变图像中对应位置坐标(u,v),并分别保存坐标(u,v)到mapx和mapy中
for( int i = 0; i < size.height; ++i)
{
float* m1f = map1.getMat().ptr<float>(i);
float* m2f = map2.getMat().ptr<float>(i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f;
//二维图像平面坐标系->摄像机坐标系
double _x = i*iR(0, 1) + iR(0, 2),
_y = i*iR(1, 1) + iR(1, 2),
_w = i*iR(2, 1) + iR(2, 2);
for( int j = 0; j < size.width; ++j)
{
//归一化摄像机坐标系,相当于假定在Z=1平面上
double x = _x/_w, y = _y/_w;
//求鱼眼半球体截面半径r
double r = sqrt(x*x + y*y);
//求鱼眼半球面上一点与光心的连线和光轴的夹角Theta
double theta = atan(r);
//畸变模型求出theta_d,相当于有畸变的角度值
double theta2 = theta*theta, theta4 = theta2*theta2, theta6 = theta4*theta2, theta8 = theta4*theta4;
double theta_d = theta * (1 + k[0]*theta2 + k[1]*theta4 + k[2]*theta6 + k[3]*theta8);
//利用有畸变的Theta值,将摄像机坐标系下的归一化三维坐标,重投影到二维图像平面,得到(j,i)对应畸变图像中的(u,v)
double scale = (r == 0) ? 1.0 : theta_d / r;
double u = f[0]*x*scale + c[0];
double v = f[1]*y*scale + c[1];
//保存(u,v)坐标到mapx,mapy
if( m1type == CV_16SC2 )
{
int iu = cv::saturate_cast<int>(u*cv::INTER_TAB_SIZE);
int iv = cv::saturate_cast<int>(v*cv::INTER_TAB_SIZE);
m1[j*2+0] = (short)(iu >> cv::INTER_BITS);
m1[j*2+1] = (short)(iv >> cv::INTER_BITS);
m2[j] = (ushort)((iv & (cv::INTER_TAB_SIZE-1))*cv::INTER_TAB_SIZE + (iu & (cv::INTER_TAB_SIZE-1)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
}
//这三条语句是上面 ”//二维图像平面坐标系->摄像机坐标系“的一部分,是矩阵iR的第一列,这样写能够简化计算
_x += iR(0, 0);
_y += iR(1, 0);
_w += iR(2, 0);
}
}
}普通相机模型的畸变校正
同样建议参考OpenCV官方文档阅读代码。
主要流程和上面Fisheye模型差不多,只有第4部分的畸变模型不一样,普通相机的畸变模型如下:
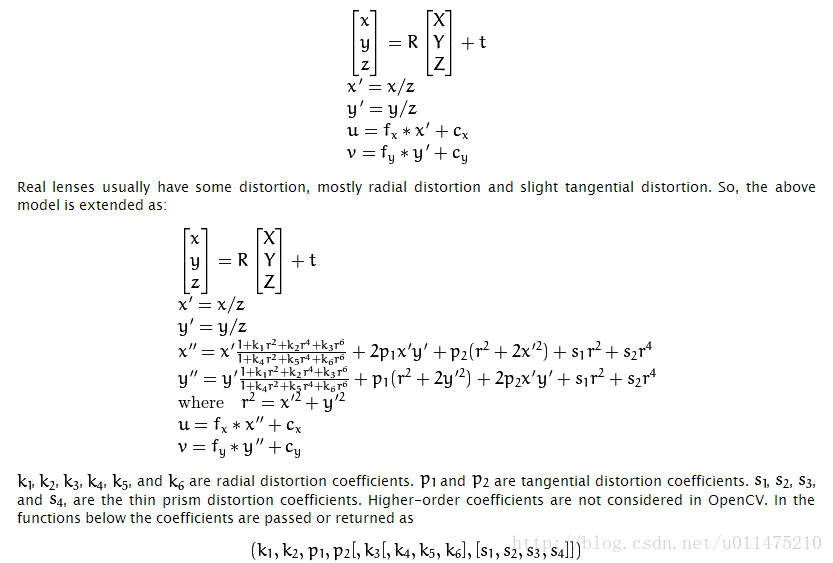
同样把源代码贴上,并加上注解:
#include <opencv2\opencv.hpp>
void cv::initUndistortRectifyMap( InputArray _cameraMatrix, InputArray _distCoeffs,
InputArray _matR, InputArray _newCameraMatrix,
Size size, int m1type, OutputArray _map1, OutputArray _map2 )
{
Mat cameraMatrix = _cameraMatrix.getMat(), distCoeffs = _distCoeffs.getMat();
Mat matR = _matR.getMat(), newCameraMatrix = _newCameraMatrix.getMat();
if( m1type <= 0 )
m1type = CV_16SC2;
CV_Assert( m1type == CV_16SC2 || m1type == CV_32FC1 || m1type == CV_32FC2 );
_map1.create( size, m1type );
Mat map1 = _map1.getMat(), map2;
if( m1type != CV_32FC2 )
{
_map2.create( size, m1type == CV_16SC2 ? CV_16UC1 : CV_32FC1 );
map2 = _map2.getMat();
}
else
_map2.release();
Mat_<double> R = Mat_<double>::eye(3, 3);
Mat_<double> A = Mat_<double>(cameraMatrix), Ar;
if( !newCameraMatrix.empty() )
Ar = Mat_<double>(newCameraMatrix);
else
Ar = getDefaultNewCameraMatrix( A, size, true );
if( !matR.empty() )
R = Mat_<double>(matR);
if( !distCoeffs.empty() )
distCoeffs = Mat_<double>(distCoeffs);
else
{
distCoeffs.create(14, 1, CV_64F);
distCoeffs = 0.;
}
CV_Assert( A.size() == Size(3,3) && A.size() == R.size() );
CV_Assert( Ar.size() == Size(3,3) || Ar.size() == Size(4, 3));
//LU分解求新的内参矩阵Ar与旋转矩阵R乘积的逆矩阵iR
Mat_<double> iR = (Ar.colRange(0,3)*R).inv(DECOMP_LU);
const double* ir = &iR(0,0);
//从旧的内参矩阵中取出光心位置u0,v0,和归一化焦距fx,fy
double u0 = A(0, 2), v0 = A(1, 2);
double fx = A(0, 0), fy = A(1, 1);
//尼玛14个畸变系数,不过大多用到的只有(k1,k2,p1,p2),最多加一个k3,用不到的置为0
CV_Assert( distCoeffs.size() == Size(1, 4) || distCoeffs.size() == Size(4, 1) ||
distCoeffs.size() == Size(1, 5) || distCoeffs.size() == Size(5, 1) ||
distCoeffs.size() == Size(1, 8) || distCoeffs.size() == Size(8, 1) ||
distCoeffs.size() == Size(1, 12) || distCoeffs.size() == Size(12, 1) ||
distCoeffs.size() == Size(1, 14) || distCoeffs.size() == Size(14, 1));
if( distCoeffs.rows != 1 && !distCoeffs.isContinuous() )
distCoeffs = distCoeffs.t();
const double* const distPtr = distCoeffs.ptr<double>();
double k1 = distPtr[0];
double k2 = distPtr[1];
double p1 = distPtr[2];
double p2 = distPtr[3];
double k3 = distCoeffs.cols + distCoeffs.rows - 1 >= 5 ? distPtr[4] : 0.;
double k4 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? distPtr[5] : 0.;
double k5 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? distPtr[6] : 0.;
double k6 = distCoeffs.cols + distCoeffs.rows - 1 >= 8 ? distPtr[7] : 0.;
double s1 = distCoeffs.cols + distCoeffs.rows - 1 >= 12 ? distPtr[8] : 0.;
double s2 = distCoeffs.cols + distCoeffs.rows - 1 >= 12 ? distPtr[9] : 0.;
double s3 = distCoeffs.cols + distCoeffs.rows - 1 >= 12 ? distPtr[10] : 0.;
double s4 = distCoeffs.cols + distCoeffs.rows - 1 >= 12 ? distPtr[11] : 0.;
double tauX = distCoeffs.cols + distCoeffs.rows - 1 >= 14 ? distPtr[12] : 0.;
double tauY = distCoeffs.cols + distCoeffs.rows - 1 >= 14 ? distPtr[13] : 0.;
//tauX,tauY这个是什么梯形畸变,用不到的话matTilt为单位阵
// Matrix for trapezoidal distortion of tilted image sensor
cv::Matx33d matTilt = cv::Matx33d::eye();
cv::detail::computeTiltProjectionMatrix(tauX, tauY, &matTilt);
for( int i = 0; i < size.height; i++ )
{
float* m1f = map1.ptr<float>(i);
float* m2f = map2.empty() ? 0 : map2.ptr<float>(i);
short* m1 = (short*)m1f;
ushort* m2 = (ushort*)m2f;
//利用逆矩阵iR将二维图像坐标(j,i)转换到摄像机坐标系(_x,_y,_w)
double _x = i*ir[1] + ir[2], _y = i*ir[4] + ir[5], _w = i*ir[7] + ir[8];
for( int j = 0; j < size.width; j++, _x += ir[0], _y += ir[3], _w += ir[6] )
{
//摄像机坐标系归一化,令Z=1平面
double w = 1./_w, x = _x*w, y = _y*w;
//这一部分请看OpenCV官方文档,畸变模型部分
double x2 = x*x, y2 = y*y;
double r2 = x2 + y2, _2xy = 2*x*y;
double kr = (1 + ((k3*r2 + k2)*r2 + k1)*r2)/(1 + ((k6*r2 + k5)*r2 + k4)*r2);
double xd = (x*kr + p1*_2xy + p2*(r2 + 2*x2) + s1*r2+s2*r2*r2);
double yd = (y*kr + p1*(r2 + 2*y2) + p2*_2xy + s3*r2+s4*r2*r2);
//根据求取的xd,yd将三维坐标重投影到二维畸变图像坐标(u,v)
cv::Vec3d vecTilt = matTilt*cv::Vec3d(xd, yd, 1);
double invProj = vecTilt(2) ? 1./vecTilt(2) : 1;
double u = fx*invProj*vecTilt(0) + u0;
double v = fy*invProj*vecTilt(1) + v0;
//保存u,v的值到Mapx,Mapy中
if( m1type == CV_16SC2 )
{
int iu = saturate_cast<int>(u*INTER_TAB_SIZE);
int iv = saturate_cast<int>(v*INTER_TAB_SIZE);
m1[j*2] = (short)(iu >> INTER_BITS);
m1[j*2+1] = (short)(iv >> INTER_BITS);
m2[j] = (ushort)((iv & (INTER_TAB_SIZE-1))*INTER_TAB_SIZE + (iu & (INTER_TAB_SIZE-1)));
}
else if( m1type == CV_32FC1 )
{
m1f[j] = (float)u;
m2f[j] = (float)v;
}
else
{
m1f[j*2] = (float)u;
m1f[j*2+1] = (float)v;
}
}
}
}希望对需要的人能有所帮助,欢迎订阅、关注、收藏、评论、点赞哦~~( ̄▽ ̄~)~
完的汪(∪。∪)。。。zzz















 1141
1141

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









