







 ROS的costmap_2d库中的Layer类扮演关键角色,其数据成员提供对主地图的访问。该类主要作为抽象接口,定义了子类必须实现的方法,使得不同类型的地图操作具有一致性。重要的虚拟方法有待子类实现,为plugin提供统一的调用方式。
ROS的costmap_2d库中的Layer类扮演关键角色,其数据成员提供对主地图的访问。该类主要作为抽象接口,定义了子类必须实现的方法,使得不同类型的地图操作具有一致性。重要的虚拟方法有待子类实现,为plugin提供统一的调用方式。
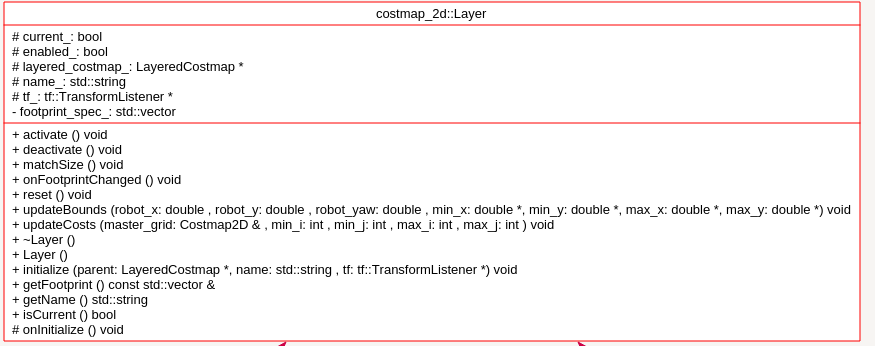
这个类中有一个LayeredCostmap* layered_costmap_数据成员,这个数据成员很重要,因为这个类就是通过这个指针获取到的对master map的操作。没有这个指针,所有基于Layer继承下去的地图的类,都无法操作master map。
这个类基本上没有什么实质性的操作,主要是提供了统一的接口,要求子类必须实现这些方法。这样plugin使用的时候,就可以不用管具体是什么类型的map,反正都有同样的方法名。
以下是这个类实现的两个方法,其他的方法基本上都是virtual ,要求子类实现。
void Layer::initialize(LayeredCostmap* parent, std::string name, tf::TransformListener *tf)
{
layered_costmap_ = parent;
name_ = name;
tf_ = tf;
onInitialize();
}
const std::vector<geometry_msgs::Point>& Layer::getFootprint() < 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1881
1881

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









