







本章节包括
2D costmap的解释
全局成本图
本地成本图
Nav2如何使用costmap避开障碍
最后将所有导航部分集成到一个启动文件中
成本图
costmap是机器人再网格地图上感知障碍物的二维表示。
每个网格单元包含传感器检测到的障碍物信息
每个单元的代价可能是未知的、为0的、占用的或者膨胀的
不同的颜色表示碰撞障碍物的可能性
然后,controllers planners 还有 recoveries使这些信息安全高效地计算其任务
全局、本地成本图
有两种类型的成本图
根据静态地图中的障碍物生成全局成本图,是planner用来生成长期路径的
根据机器人在周围检测到的新障碍物创建,使用它来生成短期路径并避免动态障碍。
不同点
全局成本图帮助避免已知障碍物,局部成本图帮助避免动态障碍物
全局覆盖整个地图,局部覆盖机器人周围一小块区域
全局成本图是静态的,局部成本图是动态的
在导航系统中添加全局成本图
在planner_server.yaml中加入以下配置
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 1.0
publish_frequency: 1.0
global_frame: map
robot_base_frame: base_link
use_sim_time: True
robot_radius: 0.15
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "inflation_layer"]
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.35
always_send_full_costmap: True练习5.1
将上述设置列表添加到planner_server.yaml中的文件底部,需要考虑缩进
编译并且source
启动所有的路径规划系统
打开RVIZ,加载路径规划的config,并正确定位机器人
在display中加入costmap并订阅/global_costmap/costmap,选择color scheme,保存config
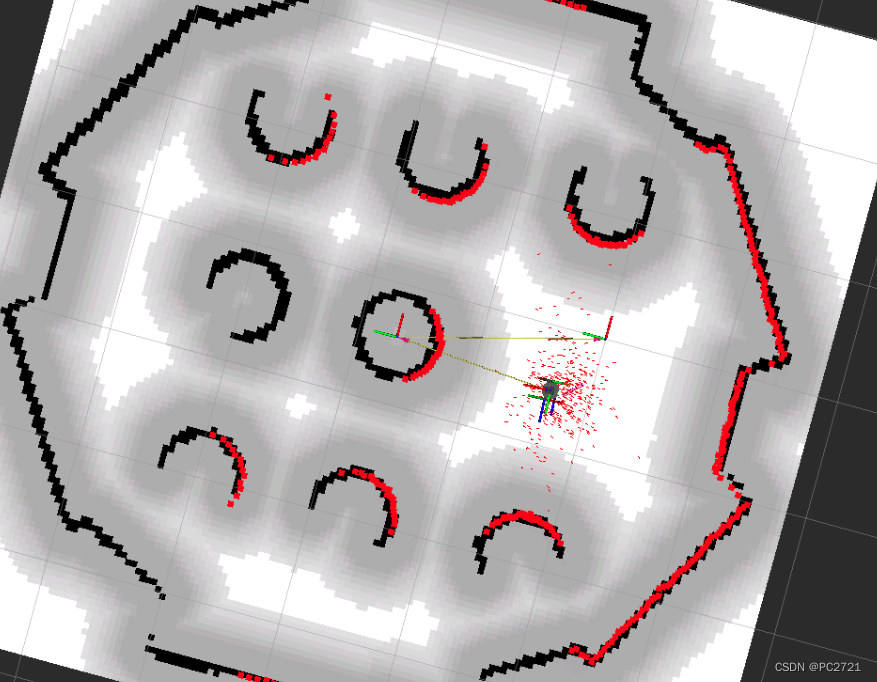
应该会得到如下图
在仿真中添加一个额外袁旭,通过以下操作添加额外构造的圆柱体
source /home/simulations/ros2_sims_ws/install/setup.bash
ros2 run gazebo_ros spawn_entity.py -entity construction_cone -database construction_cone在rviz中你就会看到雷达对
你会观察到
1. 地图上的障碍物以不同的灰色色调展开,以指示机器人无法移动的空间。浅灰色区域是可以被用于规划的
2. 激光会检测到额外的圆锥体,但是不会加入costmap中,意味着物体在路径上不会被考虑,机器人可能撞到它
全局成本地图障碍层
全局成本图是作为不同障碍层的叠加生成的。
每一层都会根据该层如何计算障碍物,在全局成本图中添加一组障碍物
可用成本图层:
static layer-将静态地图中的存在的任何黑点添加为全局成本地图的障碍
inflation layer-将通货膨胀添加到全局成本图中的任何障碍,作为保持的安全距离
obastacle layer-将2D传感器检测到的任何物体添加到全局成本图中
voxel layer-从点云数据添加到全局成本图的3D障碍
你可以指定要应用于“全局成本图”的一个或所有先前层。然而,包含它们,您需要将它添加到插件列表中,然后为每个插件包含配置参数。
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]练习5.2
在先前的练习中,没用使用障碍层向全局成本图加入障碍,这就是为什么没用加入那个圆柱体的原因
在本练习中,你需要
1. 将障碍层作为插件加入到全局成本图中
2. 在planner_server.yaml中加入以下内容,与其他插件同一级别,考虑缩进
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0在infaltion_layer之前包含obstracle_layer,否则infation_layer中不会放大新检测到的障碍
现在再启动就可以看到新的障碍物变灰色。
全局成本图的参数
1. 通用参数
global_frame string map 参考框架
height int 5m 成本图高度
width int 5m 成本图宽度
plugin vector 插件名称列表
publish_frequency double 1.0Hz 发布频率
resolution double 0.1 像素分辨率,单位为米
robot_base_frame string "base_link" 机器人底座
robot_radius double 0.1m 如果未提供足迹坐标,则机器人使用半径
update_frequency double 5Hz 成本图更新频率
2. static layer
map_subscribe_transient_local bool true 映射map主题的QoS设置
enabled bool true 是否启用
subscribe_to_updates bool true 收到静态地图更新后订阅它们
transform_tolerance double 0.1m 公差
3. infaltion layer
enabled bool true 是否已经启用
infaltion_radius double 0.55 在致命障碍物周围膨胀的costmap半径
cost_scaling_factor double 1.0 膨胀半径上的指数衰减因子
always_send_full_costmap bool true 是否每次更新都发送完整的costmap,而不是部分更新
4. obstacle layer
enabled bool true 使能
observation_sources vector {""} 数据源的名字空间
footprint_clearing_enabled bool true 清楚机器人足迹下的所有占用单元格
max_obstacle_height double 2.0 返回添加到占用网格的最大高度
combination_method int 1 枚举用于向主costmap添加数据的方法,默认为最大值
topic string "" 数据主题
obstacle_range double 2.5 costmap中标记障碍物的最大范围
raytrace_range double 3.0 光线追踪从costmap清除障碍物的最大范围
min_obstacle_height double 0.0 要添加以返回占用网格的最小高度。
clearing bool true 是否应在Costmap中清除源光线跟踪。
marking bool true 源是否应在Costmap中标记。
data_type string "laserscan" 输入的数据类型,LaserScan或PointCloud2。
inf_is_valid bool false 激光扫描仪的无限回报对光线投射是否有效
5. voxel layer
详情可见官方文档
添加局部成本图
参数添加到controller的yaml中
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_link
use_sim_time: True
rolling_window: true
width: 1
height: 1
resolution: 0.05
robot_radius: 0.15
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 3.0
inflation_radius: 0.35
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
练习5.3
在controller.yaml中添加以上内容
编译
启动路径规划系统
打开rviz的config
在display中再添加一个costmap,选择color scheme。保存设置
配置以显示可视化的local_costmap
彩色的部分是本地成本图,正如你看到的它只覆盖地图的一小部分。
添加圆锥体,将机器人移动到圆锥体一侧
可以看到机器人路过圆锥体时避开圆锥体
机器人形状在costmap中的作用
机器人形状表明costmap中的障碍物会膨胀到疏密程度。在计算给定区域中的路径是否可用时将考虑该形状。可以在局部和全局的costmap参数中指定机器人的形状。
通常使用圆形或接近圆形的机器人,在这些情况下使用radius参数
你会发现之前的参数为0.3
对于更复杂的机器人,比如矩形、大正方体等奇怪的形状,必须使用足迹参数,指示机器人每个点的坐标。
足迹意味着机器人地面上的投影,比如65cm的正方形机器人,可以用以下参数
footprint: '[[0.325, 0.325], [0.325, -0.325], [-0.325, -0.325], [-0.325, 0.325]]'重要:不要同时指定footprint和robot_radius
controller配置的其他更改
有一个附加更改,在config文件的critics section中。如果用radius参数,就需要指定BaseObstacle
如果用footprint参数,就需要指定ObstacleFootprint
练习5.4
在本练习中,将Cotsmaps配置从使用robot_radius更改为TurtleBot3机器人的足迹。
步骤: 确定机器人的尺寸
为机器人的每个角创建点列表
修改两个Costmap参数
检查导航是否仍正常工作
footprint: '[ [0.089, 0.069], [0.089, -0.069], [-0.089, -0.069], [-0.089, 0.069] ]'建立一个单独的navigation启动文件
目前你已经完成了所有导航内容,需要有一个管理所有导航节点的节点lifecycle
但是现在有两个,一个是map_server,一个管理的是剩下的。
不过现在要合二为一
练习5.5
在pathplanner_server中,创建一个navigation.launch.py的新启动文件,包含所有导航节点的启动
需要包括
1. map_erver,localization,pathplanner,controller,bt_navigator以及recoveries_server的启动文件
2. 记住用一个nav2_lifecycle_manager管理所有节点
3. include所有节点的config files
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch_ros.actions import Node
def generate_launch_description():
controller_yaml = os.path.join(get_package_share_directory('path_planner_server'), 'config', 'controller.yaml')
bt_navigator_yaml = os.path.join(get_package_share_directory('path_planner_server'), 'config', 'bt_navigator.yaml')
planner_yaml = os.path.join(get_package_share_directory('path_planner_server'), 'config', 'planner_server.yaml')
recovery_yaml = os.path.join(get_package_share_directory('path_planner_server'), 'config', 'recovery.yaml')
nav2_yaml = os.path.join(get_package_share_directory('localization_server'), 'config', 'amcl_config.yaml')
map_file = os.path.join(get_package_share_directory('map_server'), 'config', 'turtlebot_area.yaml')
return LaunchDescription([
Node(
package='nav2_map_server',
executable='map_server',
name='map_server',
output='screen',
parameters=[{'use_sim_time': True},
{'yaml_filename':map_file}]
),
Node(
package='nav2_amcl',
executable='amcl',
name='amcl',
output='screen',
parameters=[nav2_yaml]
),
Node(
package='nav2_controller',
executable='controller_server',
name='controller_server',
output='screen',
parameters=[controller_yaml]),
Node(
package='nav2_planner',
executable='planner_server',
name='planner_server',
output='screen',
parameters=[planner_yaml]),
Node(
package='nav2_recoveries',
executable='recoveries_server',
name='recoveries_server',
parameters=[recovery_yaml],
output='screen'),
Node(
package='nav2_bt_navigator',
executable='bt_navigator',
name='bt_navigator',
output='screen',
parameters=[bt_navigator_yaml]),
Node(
package='nav2_lifecycle_manager',
executable='lifecycle_manager',
name='lifecycle_manager',
output='screen',
parameters=[{'autostart': True},
{'node_names': ['map_server',
'amcl',
'controller_server',
'planner_server',
'recoveries_server',
'bt_navigator']}])
])
















 606
606

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









