







 本文主要探讨ROS navigation stack中的costmap_2d组件,特别是CostmapLayer类。该类负责维护地图数据,并提供了更新数据到全局地图的方法。通过分析其UML图,我们可以了解CostmapLayer提供的关键操作,包括用于更新地图数据的成员函数。这些函数对于理解ROS机器人路径规划和避障至关重要。
本文主要探讨ROS navigation stack中的costmap_2d组件,特别是CostmapLayer类。该类负责维护地图数据,并提供了更新数据到全局地图的方法。通过分析其UML图,我们可以了解CostmapLayer提供的关键操作,包括用于更新地图数据的成员函数。这些函数对于理解ROS机器人路径规划和避障至关重要。
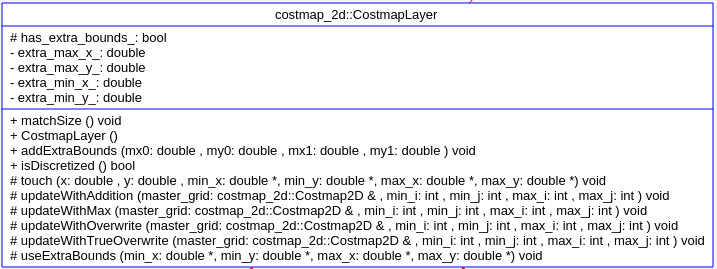
这个类是为ObstacleLayer StaticLayer voxelLayer 这种维护了自己所在层的地图数据的类,提供了一些公共的操作方法。
从UML中可以看到,这个类提供了以下方法,这些方法的参数列表均为(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j)
updateWithTrueOverwrite
updateWithOverwrite
updateWithMax
updateWithAddition这些成员函数都是为本层的地图,如何更新数据到master map上的一些更新方法。这里调一个例子说明:
void CostmapLayer::updateWithOverwrite(costmap_2d::Costmap2D& master_grid, int min_i, int min_j, int max_i, int max_j)
{
if (!enabled_)
return;
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2066
2066

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









