







坐标系及欧拉角
根据学习北航《多旋翼飞行器设计与控制》的课件,结合自己理解、推导写的笔记,以此加深理解,与大家交流。
1.坐标系
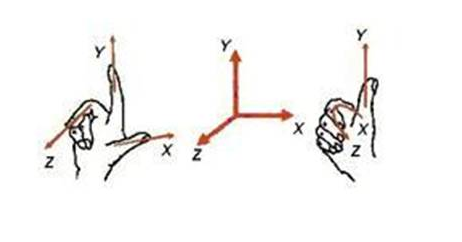
1.1右手定则
采用的坐标系和定义的角度正方向沿用右手定则。
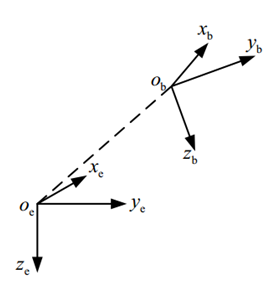
1.2惯性坐标系与机体坐标系定义
地球表面惯性坐标系(下标e)用于研究多旋翼飞行器相对于地面的运动状态,确定机体的空间位置坐标。它忽略地球曲率,即将地球表面假设成一张平面。在地面上选一点作为多旋翼飞行器起飞位置。
机体坐标系(下标b),其原点 取在多旋翼的重心上,坐标系与多旋翼固连。
轴在多旋翼对称平面内指向机头。
定义三个单位向量
在惯性坐标系中,沿着 xe,ye,ze 坐标轴的单位向量可表示为
在机体坐标系下,沿 xb,yb,zb 的坐标轴的单位向量满足(注:左上标b表示向量在机体坐标系的表示)
在地球惯性坐标系中,沿 xb,yb,zb 的坐标轴的单位向量可表示为(注:左上标e表示向量在惯性坐标系的表示)
2.姿态表示-欧拉角
2.1欧拉角的定义
机体坐标系与地面惯性坐标系之间的夹角就是飞机的姿态角,又称欧拉角。
(1)俯仰角
θ
: 机体轴与地平面(水平面)之间的夹角,飞机抬头为正。
(2)偏航角(方位角)
ψ
:机体轴在水平面上的投影与地轴之间的夹角,以机头右偏为正。
(3)滚转角(倾斜角)
ϕ
:飞机对称面绕机体轴 转过的角度,右滚为正。

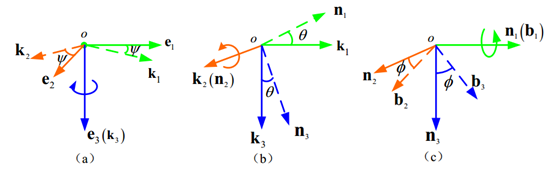
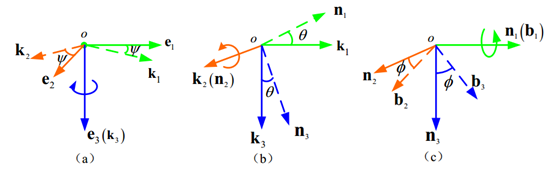
可以通过绕
e3,k2,n1
轴分别旋转欧拉角
ψ,θ,ϕ
将地球表面惯性坐标系转动到机体坐标系。
2.2 欧拉角变化率与机体角速度的关系
若机体旋转的角速度为
那么有(注:上标b表示向量在机体坐标系下的坐标表示,这里的机体坐标系当然指的是经过三次旋转后的机体坐标系,如图所示)。
在最新的机体坐标系下,显然有
如图(c), n2 可以由 b2 绕 n1 轴转过 −ϕ 而得到,因此
如图(c),(b),(d)所示, k3 可以由 b3 经过旋转 −ϕ,−θ 角度得到,因此
因此
因此有
进一步有
其中
当 θ=±π2 时,出现奇异问题。
当 ϕ,θ≈0 时,可以认为

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









