







 超级会员免费看
超级会员免费看
前言
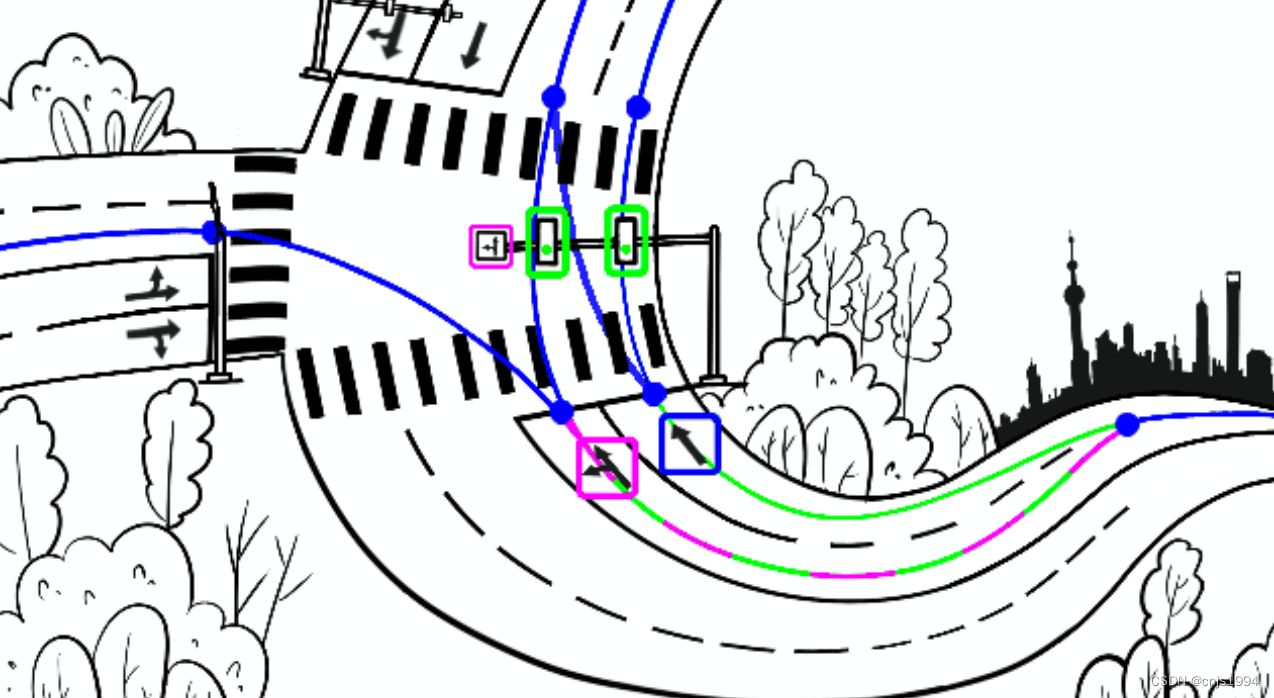
OpenLane-V2数据集是一个自动驾驶场景结构的感知和推理基准。给定覆盖整个全景视场的多视图图像,参与者不仅需要提供车道和交通元素的感知结果,还需要同时提供车道之间以及车道与交通元素之间的拓扑关系。
- 车道关键元素识别
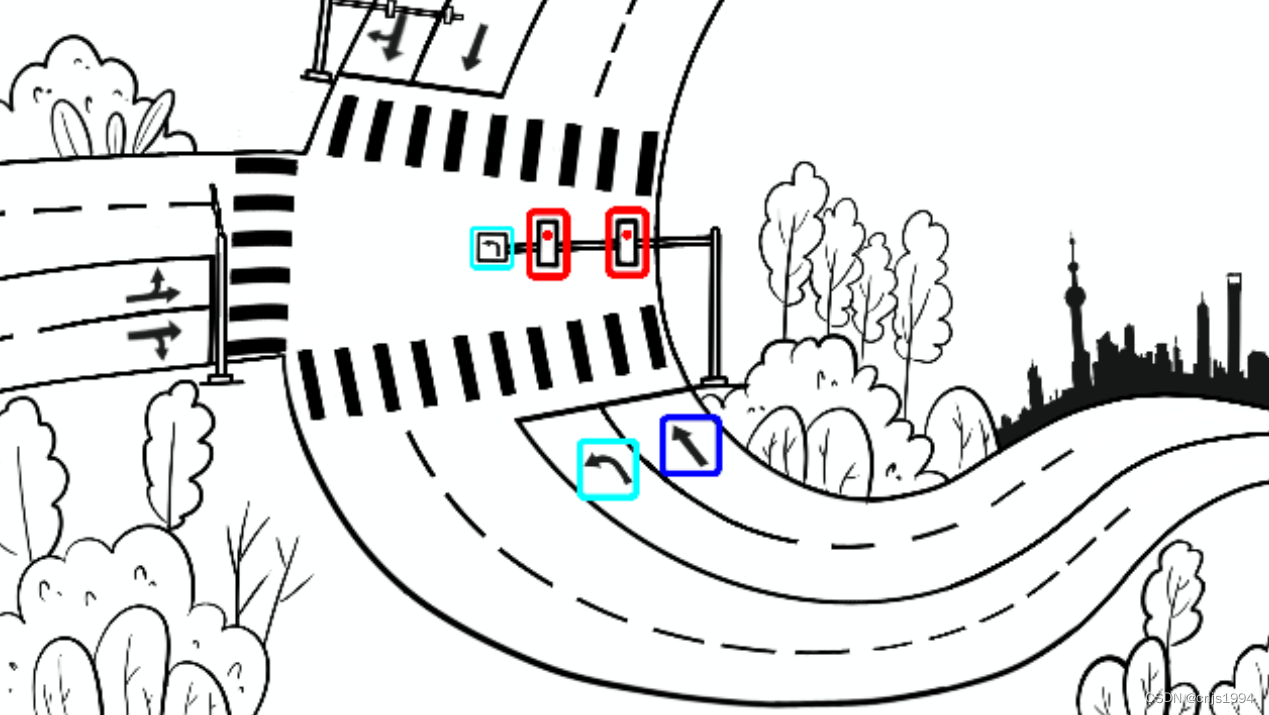
- 车道关键元素的拓扑关系识别
CVPR2023挑战赛之-开放车道拓扑信息初次测试
1. 挑战赛的评价指标
OpenlaneV2继第一个3D车道数据集OpenLane之后,提供了3D空间中的车道注释。不同的是,注释的不是车道线,而是车道中心线,这可以作为自动驾驶汽车的轨迹。此外,我们还提供了交通元素(红绿灯和路标)及其属性的注释,以及车道中心线之间、车道中心线与交通元素之间的拓扑关系。为了准确评价识别精度和拓扑关系的精准性,挑战赛建立了如下的评价指标:

指标主要包括两个部分:
-
DET指标
DET指标评价的是对车道关键标志、交通灯信号、车辆等元素目标检测模型和车道线分割精度的评估效果。 -
TOP指标
TOP指标评价的是拓扑关系的精准性评价。在给定多视图图像的情况下

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 45
45











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











