









TUM ARDrone源码阅读
简介
TUM ARDrone是TUM(慕尼黑工业大学)Vision Group开发的一款飞行器自动导航ROS程序包。该程序将PTAM算法与IMU信息进行扩展卡尔曼滤波,从而对飞行器进行位姿估计。
团队主页:https://vision.in.tum.de/research/robotvision
ROS上的tum-ardrone包wiki:http://wiki.ros.org/tum_ardrone
github项目地址:https://github.com/tum-vision/tum_ardrone
安装与运行方法
安装ardrone在ROS上的驱动ardrone_autonomy
文档地址:http://ardrone-autonomy.readthedocs.io/en/latest/如果不想飞飞机,可以安装仿真环境tum_simulator。
ROS ARDrone仿真环境搭建
indigo:https://github.com/dougvk/tum_simulator
hydro:https://github.com/tum-vision/tum_simulator
下载后按照教程安装运行即可。
注:hydro用户也要按照indigo的安装方法安装。安装tum_ardrone。按git上的方法安装运行即可。
实验效果
- 纯视觉方式定点飞行,具体表现为用手将四旋翼推远后四旋翼可根据特征点返回原点。
- 指挥四旋翼飞出指定轨迹,如房子、正方形等。视频见git主页。
整体概览
TUM-ARDrone主要包含三个ROS节点,分别为
autopilot,提供飞行的控制算法。
stateestimation,提供位姿估计。
UINode,提供基本的UI组件。
我们关心的主要为stateestimation。
stateestimation模块
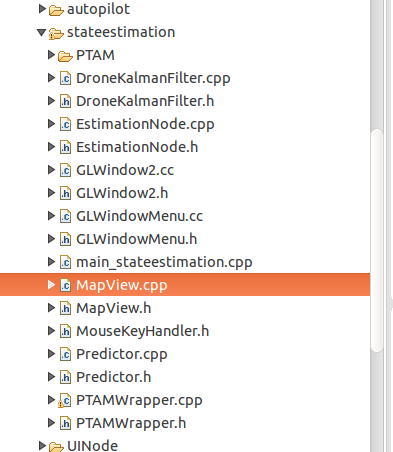
从图中可以看出,该模块下面主要实现了以下几个类
| 类名 | 功能 |
|---|---|
| DroneKalmanfilter | 顾名思义,提供卡尔曼滤波算法 |
| PTAMWrapper | 对PTAM算法进行了二次封装。 |
| EstimationNode | 程序入口。 |
| GLWindow2 | 对显示PTAM结果的窗口的二次封装。 |
| MapView | 显示点云地图 |
| Predictor | 估算尺度,坐标系变换 |
此外,PTAM算法用到了一些第三方库,位于third_party里,分别为:
TooN:数学计算库
cvd:图形库
gvars3:绘图库(猜)















 316
316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









