






安装ros环境
- 请参考我的这篇文章
链接: ubuntu16.04安装ros环境
下载qt相关的安装包
- 下载链接
链接: ros-qt下载地址
安装qt
- 有在线安装和离线安装两种
- 以离线安装为例,下载好的安装包名称为
qtcreator-ros-xenial-latest-offline-installer.run
- 添加可执行权限
sudo chmod 777 qtcreator-ros-xenial-latest-offline-installer.run
- 执行安装文件
./qtcreator-ros-xenial-latest-offline-installer.run
- 根据自己的需求选择安装路径即可,至此安装完毕
用qt创建ROS项目
- 运行qtcreator-ros
qtcreator-ros
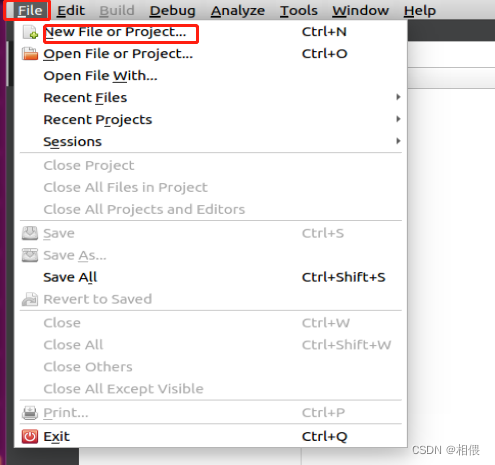
- File -> New File or Project…
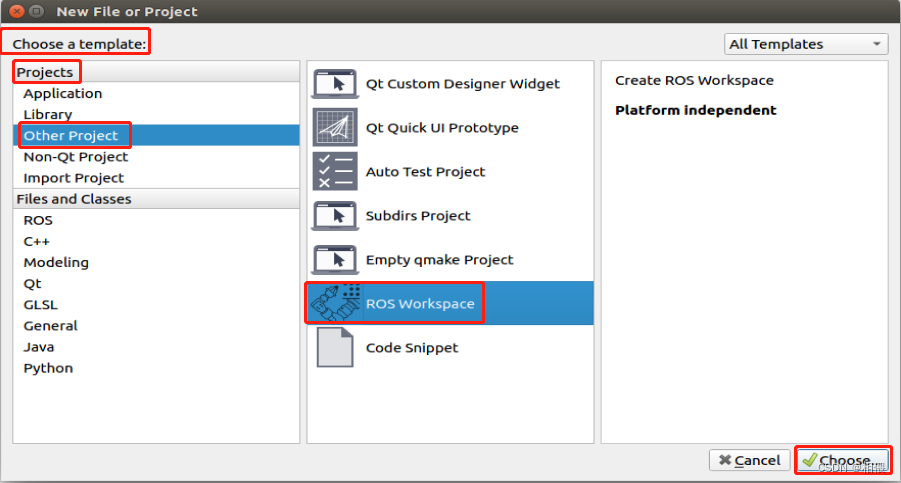
- Choose a template -> Projects -> Other Project -> ROS Workspace -> Choose
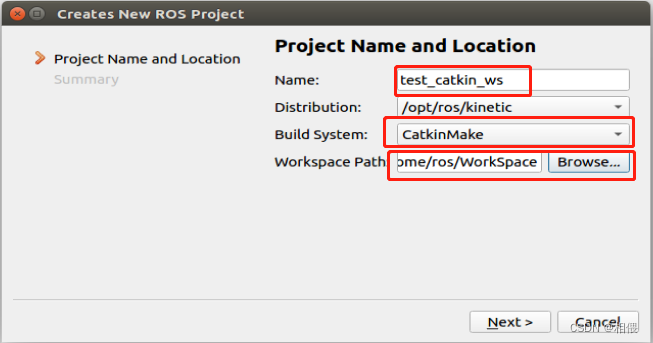
- 在下一个弹窗中填写你的相关信息
- Name : 这个填写你自己喜欢的就行
- Distribution: 默认
- Build System: CatkinMake(一定要选这一个)
- Workspace Path: 你自己的项目工作路径
- Next
- 在弹窗点击"Finish"
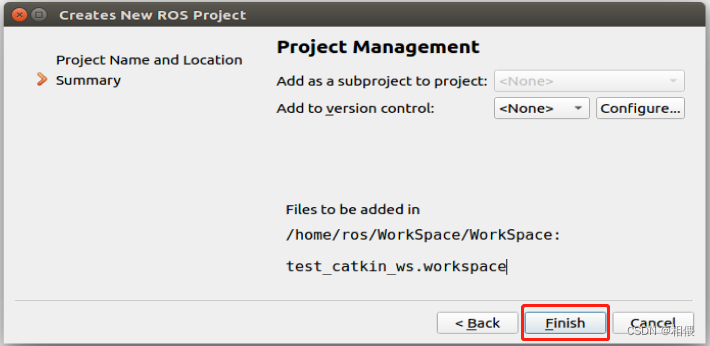
- 最后效果如下图
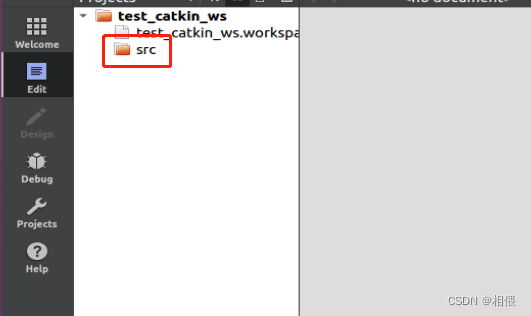
注:如果左侧不显示src目录,则重启qtcreator-ros,再打开该项目即可
创建Package
- 在之前设置的Path路径下创建一个src目录,例如我的是Path路径设置的是/home/ros/WorkSpace/WorkSpace,在该目录下创建src,打开命令行窗口
cd /home/ros/WorkSpace/WorkSpace
mkdir src
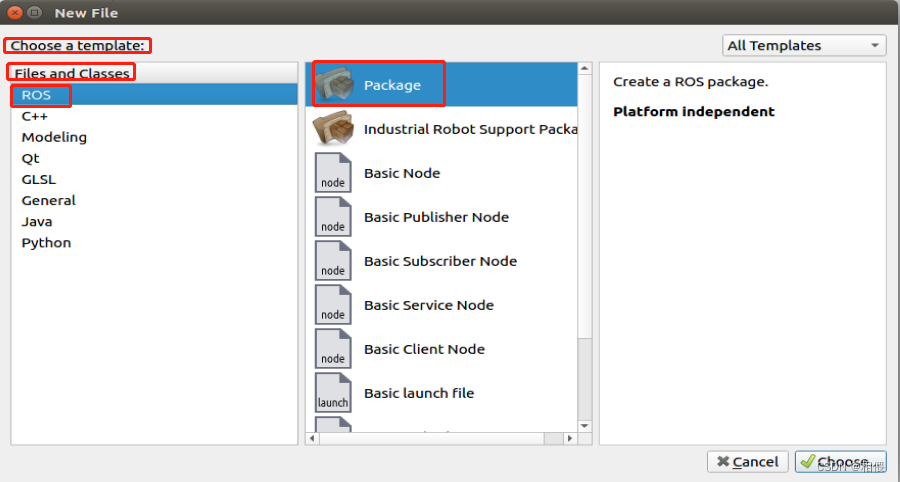
- 右键src,点击Add New…,在弹窗中选择Choose a template -> Files and Classes -> ROS -> Package -> Choose
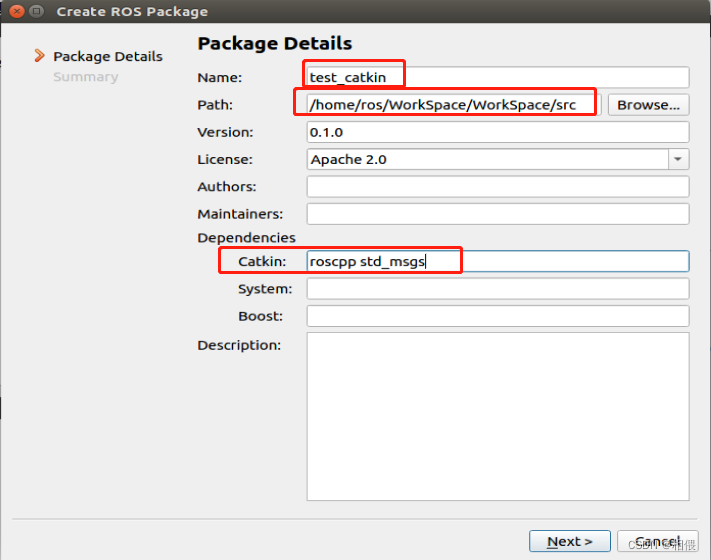
- 填写Package的信息
- Name: 你喜欢的名字
- Path: 到src目录
- Dependencies Catkin: 填写依赖的ros库
- Next
- 在弹窗中点击“Finish”
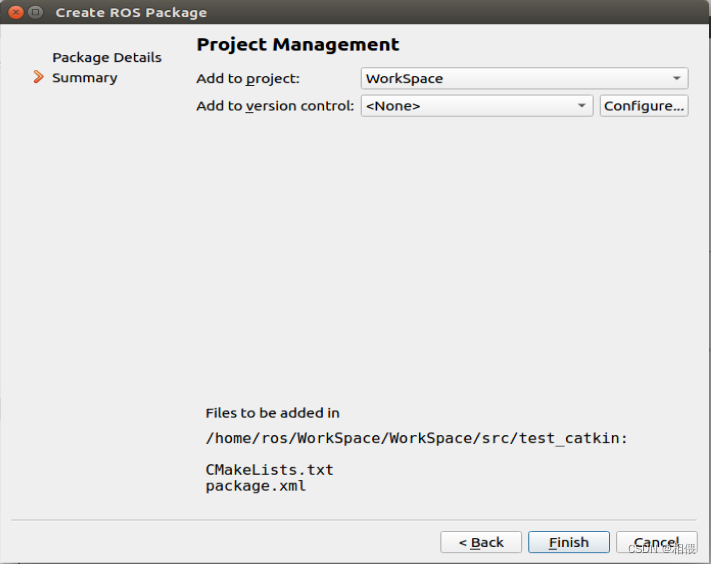
- 左侧项目结果如下图,如果显示不正确,请关闭qtcreator重新打开项目
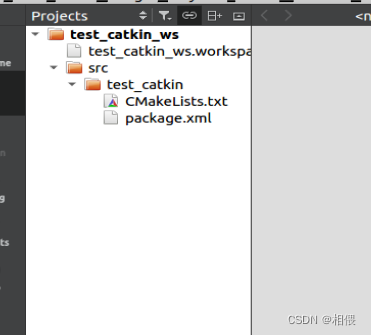
至此包创建完毕
创建ROS的node节点
- 进入到上一步创建的的Package的目录下创建src目录,例如我的是Package路径是/home/ros/WorkSpace/WorkSpace/src/test_catkin,在该目录下创建src,打开命令行窗口
cd /home/ros/WorkSpace/WorkSpace/src/test_catkin
mkdir src
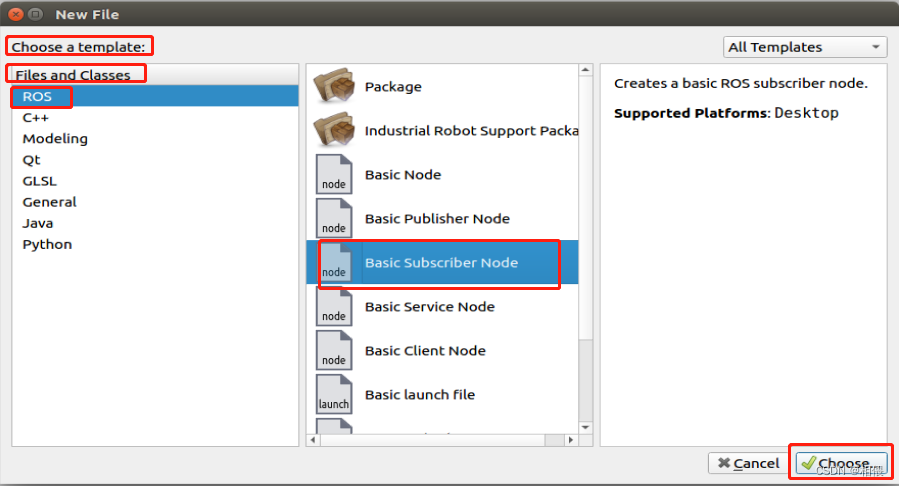
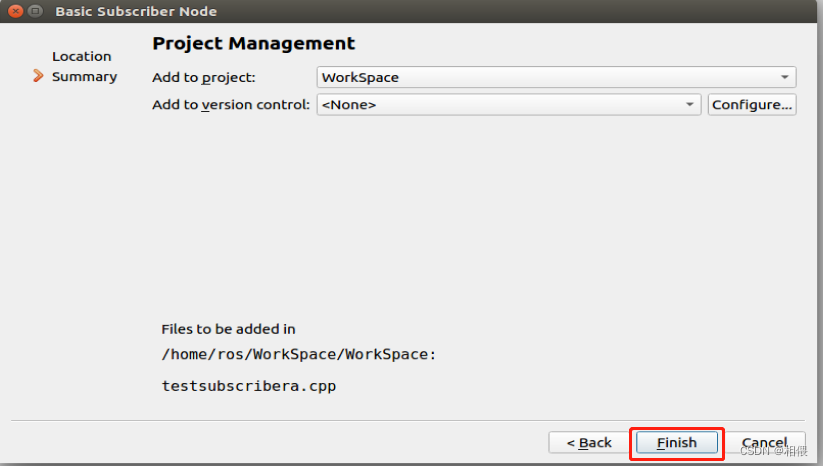
- 右键test_catkin下面的src,点击Add New…,在弹窗中选择Choose a template -> Files and Classes -> ROS -> Basi Subscriber Node -> Choose

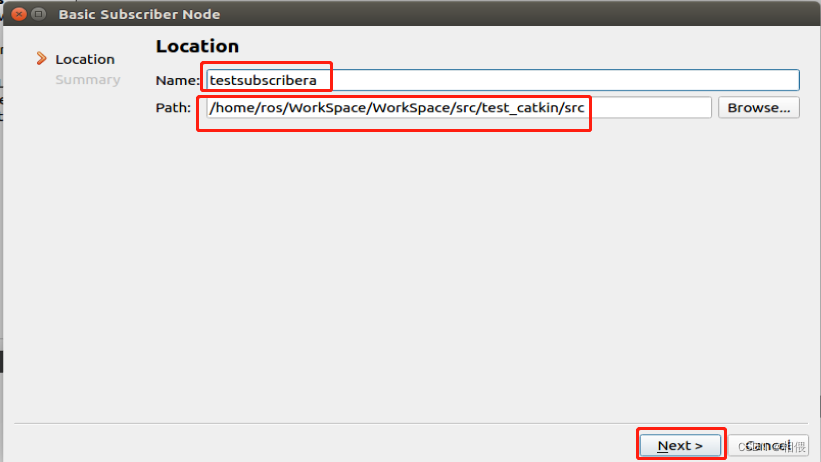
3. 填写节点名称,选择节点的存放路径
- Name : 填你喜欢的名字
- Path : Package目录下的src
- Next
- 在弹窗中点击“Finish”
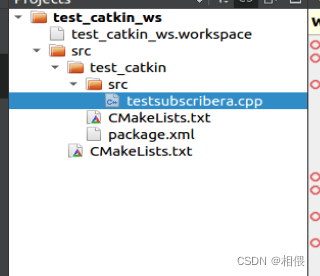
- 最终结构如下图
- 要修改节点的CMakeLists.txt,添加如下三行内容
add executable(testsubscribera src/testsubscribera.cpp)
add_dependencies(testsubscribera ($(PROJECT_NAME)_EXPORTED_TARGETS) S(catkin_EXPORTED_TARGETS))
target_link_libraries(testsubscribera (catkin_LIBRARIES))

至此节点创建完成
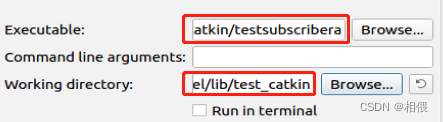
- 点击qtcreator的运行按钮,会弹出窗口
- Executable: 可执行文件
- Command line argumets: 如果没有命令行启动参数可为空
- Working directory: 可执行文件的所在目录
- 点击“OK”
- 如果提示如下错误
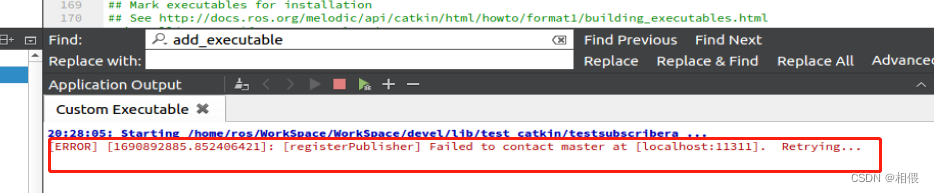
则,需要先运行roscore,启动方式,打开命令行
rosecore
再次运行qt程序,即可正常运行。
















 776
776











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









