






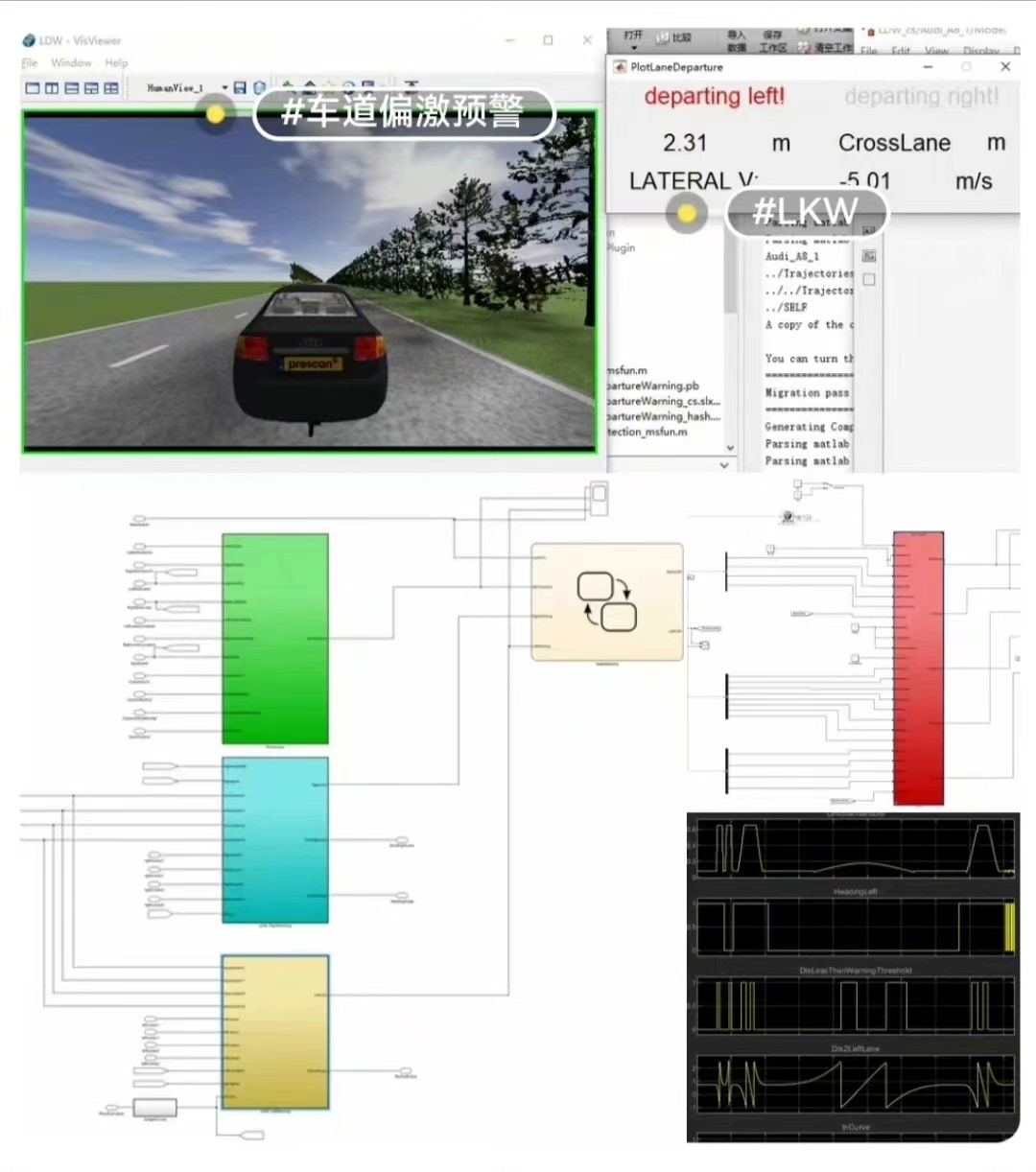
自动驾驶控制器,车道偏离预警系统,基于Prescan设计场景和交通流,在Simulink中建立了相应的控制模型。
进行LDW功能验证。
整个模型自己建立,再次强调不是Prescan自带的那种很乱很模糊的模型。
然后通过自己做了一个GUI的界面实时显示车辆当前位置信息,以及发出偏离预警警报
ID:37120705580231245
爱迪梅花
标题:基于Prescan的自动驾驶控制器和车道偏离预警系统的设计与验证
摘要:本文基于Prescan设计场景和交通流,在Simulink中建立自动驾驶控制器和车道偏离预警系统的控制模型,并通过自行设计的GUI界面实时显示车辆当前位置信息并发出偏离预警警报。本文对自动驾驶控制器和车道偏离预警系统进行了详细分析和验证,展示了其在实际应用中的可行性和有效性。
- 引言
随着智能交通技术的不断发展,自动驾驶技术成为了当下的热门研究方向。自动驾驶控制器和车道偏离预警系统作为自动驾驶技术中的重要组成部分,具有重要的实际应用价值。本文旨在通过基于Prescan设计场景和交通流,在Simulink中建立自动驾驶控制器和车道偏离预警系统的控制模型,并验证其性能和准确性。
- 自动驾驶控制器设计
为了实现自动驾驶功能,本文首先基于Prescan提供的场景和交通流数据,在
【相关代码,程序地址】:http://fansik.cn/705580231245.html
















 297
297











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









