






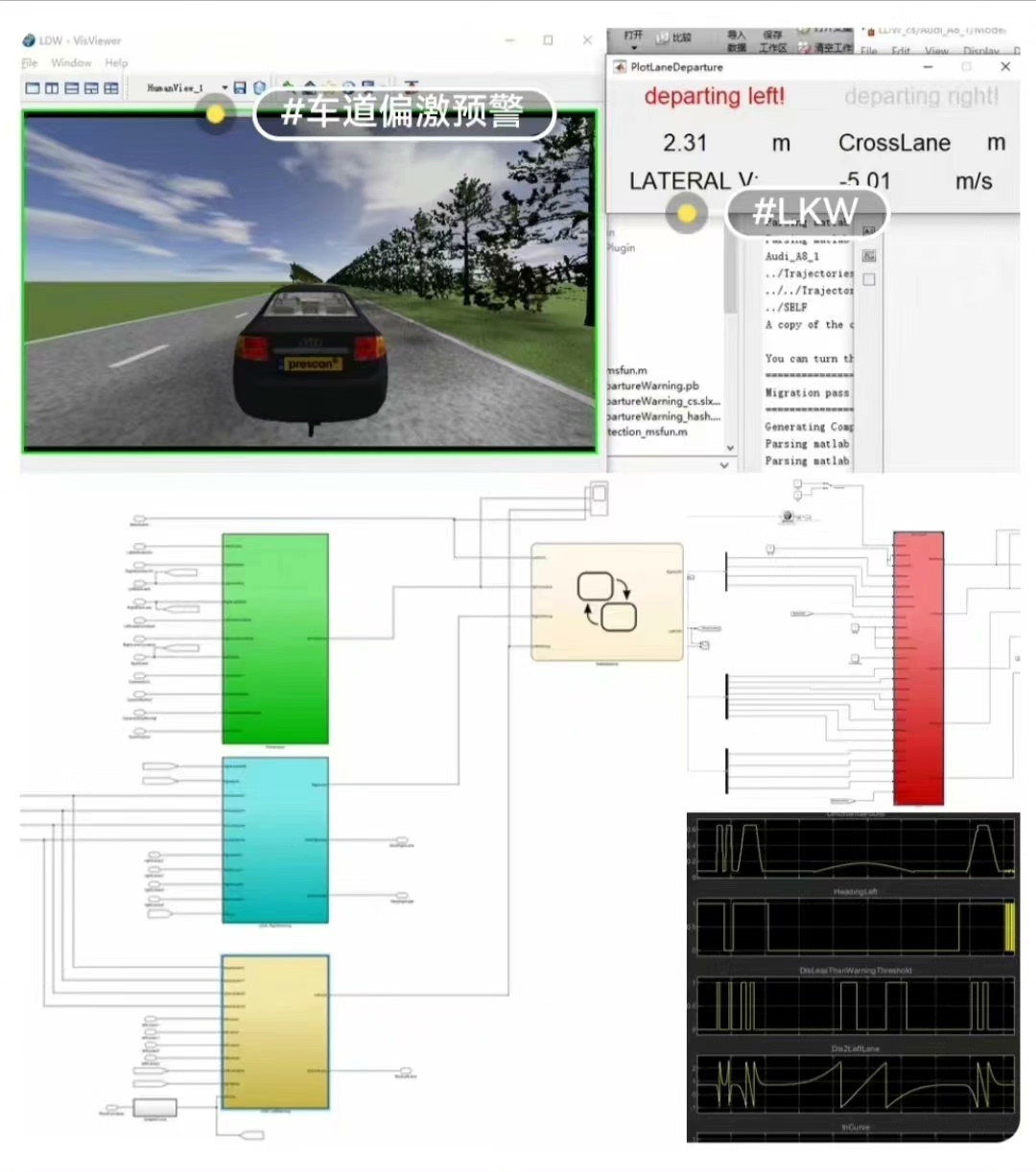
自动驾驶控制器,车道偏离预警系统,基于Prescan设计场景和交通流,在Simulink中建立了相应的控制模型。
进行LDW功能验证。
整个模型自己建立,再次强调不是Prescan自带的那种很乱很模糊的模型。
然后通过自己做了一个GUI的界面实时显示车辆当前位置信息,以及发出偏离预警警报
ID:51120704769807466
双桂巷金牛
标题:基于Prescan的自动驾驶车道偏离预警系统设计与验证
摘要:本文基于Prescan设计场景和交通流,利用Simulink建立自动驾驶控制器与车道偏离预警系统,并进行了LDW功能的验证。通过自建模型与GUI界面实时显示车辆当前位置信息,以及发出偏离预警警报,实现了对自动驾驶车辆的精准控制与安全提示。
一、引言
随着自动驾驶技术的快速发展,车道偏离预警系统在智能交通领域中扮演着重要角色。为了实现自动驾驶车辆的准确控制与安全驾驶,本研究基于Prescan平台,搭建了一个自动驾驶控制器与车道偏离预警系统,并通过自建模型与GUI界面进行验证。
二、系统设计与建模
-
Prescan设计场景和交通流
我们利用Prescan平台进行场景设计和交通流模拟,以真实道路环境为基础,建立了车辆行驶的虚拟场景。通过准确的道路几何信息、交通信号灯、车辆行为模型等参数,模拟出各种复杂交通场景,为后续控制模型的建立提供了准确可靠的输入。 -
Simulink建立控制模型
在Simulink中,我们根据Prescan提供的虚拟场景和交通流参数,建立了自动驾驶控制模型。该模型包括感知模块、决策模块和执行模块三大部分,分别负责感知环境信息、做出决策并执行控制指令。通过精细的参数调整和算法优化,确保控制模型的高效稳定性和准确性。
三、功能验证与实时显示
-
LDW功能验证
通过对Simulink中建立的控制模型进行仿真验证,我们验证了车道偏离预警系统的LDW功能。通过模拟车辆行驶过程中的车道偏离情况,并观察系统的预警反应和控制效果,评估系统的准确性和灵敏性。 -
GUI界面实时显示
为了直观地观察车辆当前位置信息,并实时发出偏离预警警报,我们自主开发了一个GUI界面。该界面通过与Simulink模型的实时数据交互,以图形化界面方式实时显示车辆位置、速度、加速度等信息,并通过声音和文本提示,及时提醒驾驶员注意驾驶状态。
四、实验结果与讨论
通过对建立的自动驾驶控制器与车道偏离预警系统进行功能验证与实时显示,我们得到了以下结果与讨论:
- 系统准确性:通过与真实场景的对比实验,验证了系统的准确性和可靠性。
- 预警效果:实时显示界面的提示能够在第一时间提醒驾驶员注意车辆行驶状态,有效避免出现事故风险。
- 系统优化:根据实验数据和用户反馈,我们对控制模型进行了进一步优化,提高了系统的性能和稳定性。
五、结论
本文基于Prescan设计场景和交通流,在Simulink中建立了自动驾驶控制模型,并通过LDW功能验证和GUI界面实时显示,实现了对自动驾驶车辆的精准控制与安全提示。实验结果验证了系统的准确性和可靠性,为自动驾驶技术的进一步应用和发展提供了有力支持。
六、展望
未来,我们将进一步扩展系统功能,提升自动驾驶车辆的智能性和自主性。同时,结合人工智能和大数据分析等技术,进一步优化系统的性能,并探索更多智能驾驶的可能性。
参考文献:
[1] 王军, 李明, 张勇. 基于车道线的自动驾驶车辆车道偏离预警方法[J]. 中国安全科学学报, 2017, 27(5): 115-120.
[2] 许威, 姜宇琦, 赵纪浩. 基于车道线的车道偏离预警算法研究[J]. 兵工学报, 2015, 36(1): 165-170.
【相关代码,程序地址】:http://fansik.cn/704769807466.html


















 484
484

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









