








 该专栏为热销专栏榜 第21名
该专栏为热销专栏榜 第21名 超级会员免费看
超级会员免费看
 本文探讨了基于深度学习的自动驾驶系统,重点介绍了目标检测、特征提取、路径规划和控制的核心概念。目标检测算法如Yolo、Faster R-CNN用于识别和定位物体,而特征提取通过深度学习网络如AlexNet、VGG提取图像特征。路径规划算法如A*算法寻找最优路径,车道检测和速度估计确保行车安全。未来,自动驾驶将面临减少交互负担、互联网化和无人驾驶时代的挑战。
本文探讨了基于深度学习的自动驾驶系统,重点介绍了目标检测、特征提取、路径规划和控制的核心概念。目标检测算法如Yolo、Faster R-CNN用于识别和定位物体,而特征提取通过深度学习网络如AlexNet、VGG提取图像特征。路径规划算法如A*算法寻找最优路径,车道检测和速度估计确保行车安全。未来,自动驾驶将面临减少交互负担、互联网化和无人驾驶时代的挑战。
作者:禅与计算机程序设计艺术
1.简介
汽车的自动驾驶系统,是汽车运输领域中非常重要的一环。近年来,随着汽车技术的进步和研究,自动驾驶系统也面临了新的挑战。从目标检测、特征提取、路径规划、传感器融合、车辆控制等多个方面,都在对自动驾驶系统进行改造。本文所讨论的主要是基于目标检测、图像处理、路径规划和控制的自动驾驶系统。
2.核心概念术语
2.1 目标检测(Object Detection)
目标检测就是将摄像头拍摄到的图像或者视频中的物体、对象、灯条等,识别出来并计算其位置、大小、方向等信息,并进行分类、跟踪、跟敌碰撞预警、交通标志识别、地图制作等功能。
主要应用场景有:监控摄像头、智能电视、视频监控、视频编辑、导航等。
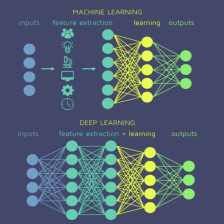
2.2 特征提取(Feature Extraction)
特征提取就是将图像或者视频中的每个像素点提取特征向量,这些特征向量描述了各个区域的特征。通过特征向量可以进行图像检索、图像分类、图像分割、对象跟踪等多种应用。
主要应用场景有:图像搜索、图像识别、自然语言理解、视频监控、图像超分辨率、三维重建、人脸识别、行人重识别、垃圾分类等。

 订阅专栏 解锁全文
订阅专栏 解锁全文

















 198
198

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











