






 本文详细介绍了如何安装、配置和使用Sumo和Carla进行自动驾驶仿真,以及如何利用强化学习进行轨迹预测和规划。这两个开源平台为自动驾驶系统开发提供了高效、可靠的模拟环境。
本文详细介绍了如何安装、配置和使用Sumo和Carla进行自动驾驶仿真,以及如何利用强化学习进行轨迹预测和规划。这两个开源平台为自动驾驶系统开发提供了高效、可靠的模拟环境。
sumo/carla/自动驾驶联合仿真 安装 配置 /教程/开发/驾驶模拟/强化学习/轨迹预测/轨迹规划
ID:83280673613315501
ohohohohoh

标题:Sumo和Carla联合仿真:实现自动驾驶下的强化学习轨迹预测与规划
摘要:本文将介绍Sumo和Carla两个开源仿真平台的安装、配置和使用教程,并结合强化学习的方法,探讨在自动驾驶场景下的轨迹预测和规划技术。通过对Sumo和Carla联合仿真的实践与分析,我们将展示如何利用这两个平台的优势,为自动驾驶系统的开发与研究提供一种高效、可靠的模拟环境。
-
引言
自动驾驶技术的快速发展为车辆行驶的效能和安全性带来了巨大的提升。在自动驾驶系统的开发过程中,对于轨迹预测和轨迹规划的准确性和高效性要求越来越高。为了满足这些需求,Sumo和Carla两个开源仿真平台被广泛应用于自动驾驶系统的开发与研究。本文将介绍如何安装、配置和使用这两个平台,并利用强化学习的方法进行轨迹预测和规划的实践。 -
Sumo平台的安装与配置
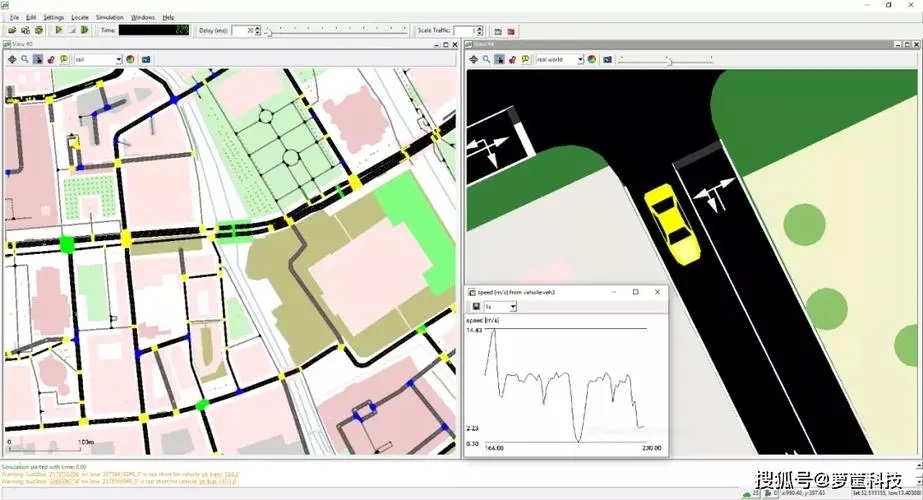
Sumo是一款用于交通仿真的软件,它可以模拟复杂的道路网络和交通流量,为自动驾驶系统的开发与研究提供真实的环境。在本节中,我们将详细介绍Sumo平台的安装和配置步骤,并通过一个实例展示其基本使用方法。 -
Carla平台的安装与配置
Carla是一款用于自动驾驶仿真的开源平台,它提供了丰富的传感器模型和车辆控制接口,为自动驾驶算法和系统的测试和验证提供了便利。本节将介绍Carla平台的安装和配置过程,并展示如何使用Carla进行自动驾驶场景的仿真。 -
强化学习在自动驾驶中的应用
强化学习是一种基于试错和反馈的学习方法,通过智能体与环境的交互来寻求最优的决策策略。在自动驾驶领域,强化学习被广泛应用于轨迹预测和规划等任务。本节将介绍强化学习在自动驾驶中的基本原理,并提供相应的实例展示。 -
Sumo和Carla联合仿真实践
在本节中,我们将结合Sumo和Carla的特点和优势,展示如何利用这两个平台进行联合仿真。通过对自动驾驶场景下的强化学习轨迹预测和规划的实践,我们将展示Sumo和Carla的联合仿真能够为自动驾驶系统的开发与研究提供高效、可靠的模拟环境。 -
结论
本文介绍了Sumo和Carla两个开源仿真平台的安装、配置和使用教程,并结合强化学习方法讨论了自动驾驶场景下的轨迹预测和规划技术。通过对Sumo和Carla联合仿真的实践与分析,我们展示了这两个平台在自动驾驶系统开发与研究中的重要作用。未来,我们将进一步探索和优化这两个平台的应用,进一步推动自动驾驶技术的发展。
关键词:Sumo,Carla,自动驾驶,联合仿真,强化学习,轨迹预测,轨迹规划
以上相关代码,程序地址:http://matup.cn/673613315501.html















 759
759

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









