






在ROS中,话题(Topic是一种基本的通信机制,它用于节点之间的消息传递。一个节点可以发布消息到一个话题,其他节点可以订阅该话题并接收消息。
【topic编程实现发布者
(1)准备工作
1、安装 ROS,确保 ROS已经正确配置并启动。
2、创建一个 ROS 工作空间。例如~/catkin_ws/src,示例代码如下:
mkdir -p ~/catkin_ws/src
工作空间(workspace)是一个存放工程开发相关文件的文件夹,包含以下内容:
src:代码空间(Source Space)
build:编译空间(Build Space)
devel:开发空间(Development Space)
install:安装空间(Install Space)
(2)创建发布者
1、在终端进入工作空间,先初始化工作空间,然后创建ros软件包
cd ~/catkin_ws/src
catkin_init_workspace
catkin_creat_pkg srr_pkg roscpp rospy std_msgs2、在catkin_ws目录下编译功能包,并设置环境变量(不设置环境变量,ros运行时会找不到功能包)
cd ~/catkin_ws
catkin_make
source devel/setup.bash1、使用c++编写发布者节点
注:如果下载了VScode则可以在里面直接创建c++文件,如果没有下载可以在终端通过以下指令创建c++源文件
touch src/publisher.cpp打开文本编辑器
gedit publisher.cpp编写发布者程序:
#include<ros/ros.h>
#include<std_msgs/String.h>
int main(int argc, char *argv[])
{
ros::init(argc,argv,"publisher_node");//初始化节点
// printf("开始发布数据\n");
ros::NodeHandle nh;
ros::Publisher pub = nh.advertise<std_msgs::String>("this_is_a_topic",10);//创建一个发布者
ros::Rate loop_rate(10);
while (ros::ok())
{
std_msgs::String msg;
printf("开始发布数据\n");
msg.data = "xiaoxifasongzhong";
pub.publish(msg);
loop_rate.sleep();
}以上程序创建了一个 ROS 节点,该节点以 10Hz 的频率发布一个名为"this_is_a_node" 的话题,该主题的类型为 std_msgs/String。
接下来在CMakeLists.txt添加编译规则
add_executable(publisher src/publisher.cpp)
target_link_libraries(publisher
${catkin_LIBRARIES})然后编译,编译之后就可以运行了
cd ~/catkin_ws
catkin_make运行发布者节点:
roscore
rosrun topic_pkg publisher2、使用python编写发布者节点
创建python源文件与创建c++相同,此处不再赘述
编写发布者程序:
#!/usr/bin/env python3
#解释器如果是ubuntu20.04以前用python,20.04以后的选择python3
#encoding = UTF-8
import rospy
from std_msgs.msg import String
if __name__ == "__main__":
rospy.init_node("publisher_node")
# rospy.logwarn("这个函数是为了确保节点初始化成功")
pub = rospy.Publisher("pub_sub",String,queue_size=10)
rate = rospy.Rate(10)
while not rospy.is_shutdown():
rospy.loginfo("开始发送消息")
msg = String()
msg.data = "圆周率=3.1415926"
pub.publish(msg)
rate.sleep()python文件属于不需要编译直接可以运行的文件,但此处需要更改文件权限,允许文件作为程序执行。具体方法如下:
方法1、找到编写的python文件,鼠标右键单机选择属性,找到权限,在界面倒数第二行【允许文件作为程序执行】前面打勾

方法二:找到文件所在文件夹,右键单击选择在终端打开,输入以下指令:
chmod +x publisher.py最后便可以执行程序了
(3)创建订阅者
订阅者创建流程与发布者创建相同,只需参考上文即可
1、使用c++编写订阅者程序
#include<ros/ros.h>
#include<std_msgs/String.h>
void feedback(std_msgs::String msg)
{
ROS_INFO(msg.data.c_str());
}
int main(int argc, char *argv[])
{
ros::init(argc,argv,"subseriber_node");
ros::NodeHandle nh;
ros::Subscriber sub = nh.subscribe<std_msgs::String>("this_is_a_topic",10,feedback);
while (ros::ok())
{
ros::spinOnce();
}
return 0;
}同样需要在在CMakeLists.txt添加编译规则
add_executable(subscriber src/subscriber.cpp)
target_link_libraries(subscriber
${catkin_LIBRARIES})2、使用python编写订阅者程序
#!/usr/bin/env python3
#解释器如果是ubuntu20.04以前用python,20.04以后的选择python3
#encoding = UTF-8
import rospy
from std_msgs.msg import String
def feedback(msg):
rospy.loginfo(msg.data)
if __name__ == "__main__":
rospy.init_node("subscriber_node")
sub = rospy.Subscriber("pub_sub",String,feedback,queue_size=10)
# while not rospy.is_shutdown:
rospy.spin()同样不要忘了将python作为可执行文件。
(4)实验结果
1、先运行ros
roscore2、依次运行刚刚编写的publisher与subscriber
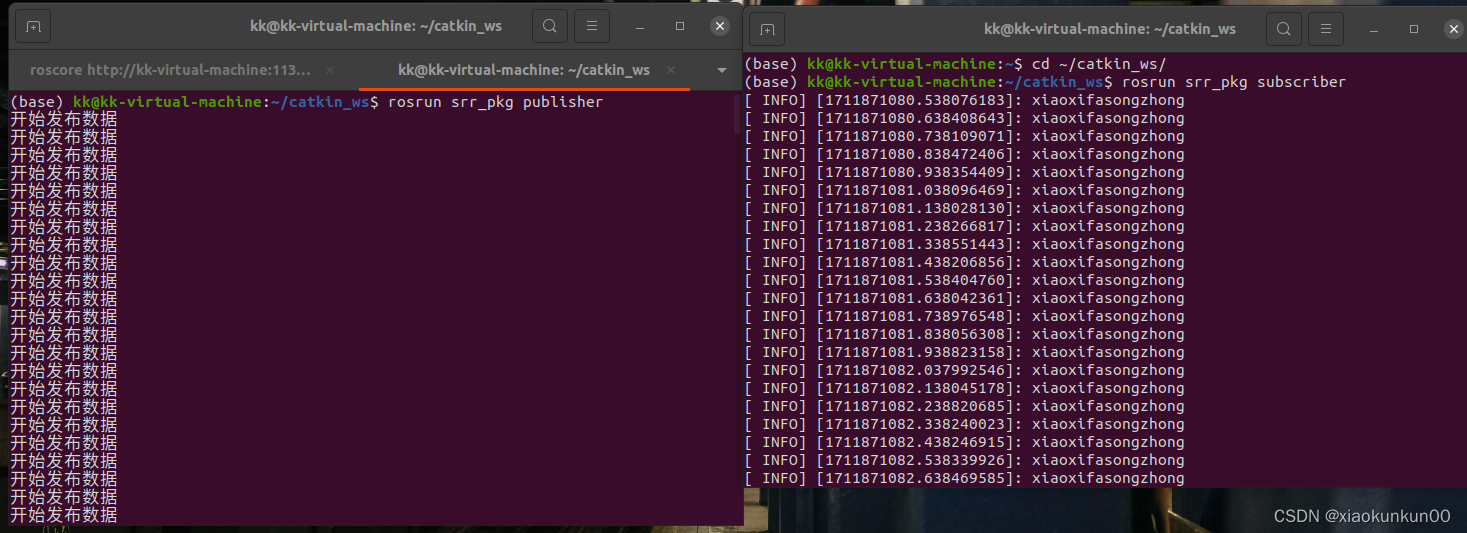
rosrun srr_pkg publisher
rosrun srr_pkg subscriber3、结果如下
4、编写的python文件,运行方式与上文相同
roscore
rosrun srr_pkg publisher.py
rosrun srr_pkg subscriber.py














 197
197











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









