







所需材料(大件)
1、空心杯电机 * 4个 (笔者用8520型号,一般716以上比较常用)
这个电机是直流有刷电机,所以不需要电调

2、螺旋桨 * 正反各2个 (一般旋转直径48-60mm,内孔1.0mm)
注意:是正反各两个!!!有些店铺写的是AB,有的写的是LR,意思都一样,都是正反方向。
3、1s锂电池 * 1个 (满电4.25V左右,3.7V为低电压,不可再使用,需要进行充电)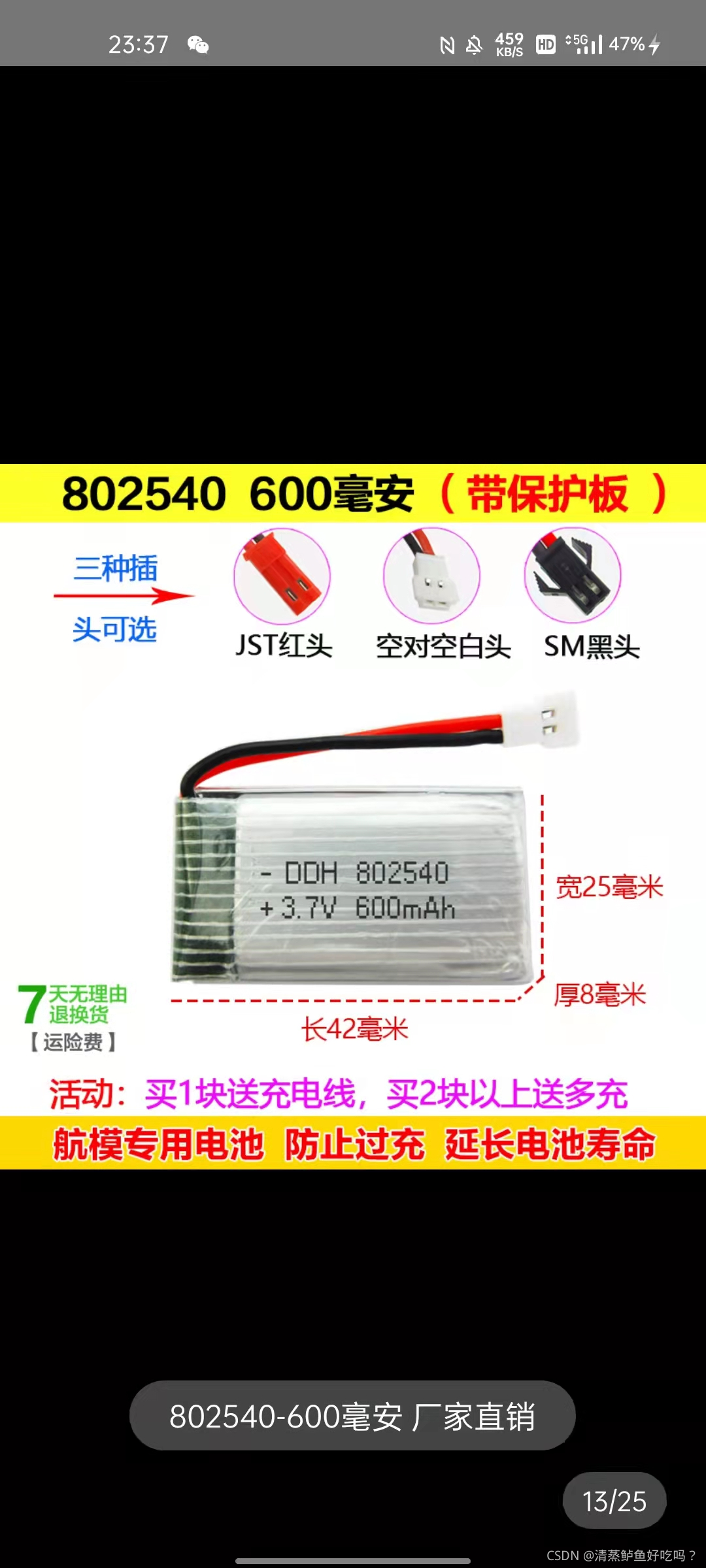
4、锂电池平衡充电器 * 1个 (锂电池需要用专用平衡充电器,不可进行乱充电,防止发生危险)
这里我是买电池送充电器了,嘿嘿。在这里需要注意一点,充电器插头与电池插头匹配。

5、航模遥控器+SBUS接收 * 1个 (不作品牌推荐,根据自己经济能力而定需要注意SBUS接收机尽量选择轻量型,如下图,只有三根线,电源和信号)

6、机架

中间和顶层可以分别放电池和主控板。
可以用3MM胶粘贴或绑带的方式来固定飞控
7、USB转TTL-CH340串口助手(用来下载固件、调参)

8.主控板(这里笔者用的是stm32f103c8t6+mpu6050的飞控主控组合)

















 971
971

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









