







摘 要
本文将设计RV-20F六轴机械手设计,六轴机器人具有作业灵活且在工作空间内达到区域较好的优点,广泛的使用在机床上下料,搬运,码垛,焊接,喷涂等作业场合,在中国智能制造的背景下,成为企业转型升级的机械的核心的设备。
本次设计从六轴工业机器人的发展现状及实际应用等多方面考虑,比较全面的介绍工业机器人在世界的发展地位及实用背景,提出本文的设计方案;其次,步进电机驱动的简洁型的六轴机械人的机械主体构造的设计,其中详细包含机器人的底座设计、大臂设计、腕部设计及机械的机械夹手部分的设计,进行六轴机器人的驱动方式及传动方式的设计,具体包括驱动步进电机的选型计算,大臂内部的传动机构设计计算,腕部的内部传动机动的设计及计算等内容,最后根据设计的传动零件的尺寸大小,用solidworks建模软件进行RV-20F六轴机械手的装配图及零件图的计算加工。
通过本文进行的简易的六轴机械手设计,将大学所学的机械设计、机械原理、机械制造及机械制图等内容全面进行综合运用,综合的将所学的理论知识运用到了实际设计中,在即将踏入社会进行了一次系统的设计训练,为将来走向工作岗位上进行了系统锻炼,为顺利进入社会工作打下基础。
关键词:六轴机械手;大臂;腕部;步进电机
1 设计方案
1.1 简易的六轴机械手总体方案设计
这次要设计的简易的六轴机械手装置要求从以下几个方面进行机械手装置的总体方案要求。
在简易机械手的工作负载主要考虑机械手的实际作业任务,结合本文设计的任务书中规定的参数,选择本文的工作负载设计为:3kg,用以满足电机的驱动选型方便及机械手的运动灵活性等要求设计[6]。
简易机械手的驱动系统
本文设计的机械手工作方式为发动机运转。根据本文的设计要求,机械手的驱动操作为步进电机操作。由于发动机运转,机械手相应的工作效率高,工作方式多变灵活,机械手装置的工作效率高,因此,各方面设计的发动机都使用步进电机。
简易机械手的传动系统
本文设计的机械手装置考虑到结构的紧凑性能要求,要求机械手的作业时灵活,因此设计的机械的转动惯量需要尽可能的小些,在机械传动中常见的传动包含带传动,链传动,齿轮传动等,在众多传动中能够保证瞬时传动比恒定的机构为齿轮传动,由于设计的电机的转动的速度较大,机器人的关节轴上的转动速度较低,因此设计的减速装置需要在有限的空间内实现大传动比的减速,因此本文有限考虑到谐波减速器,谐波减速其中主要的传动为齿轮轮系的传动[7]。
简易机械手的作业范围
设计的简易机械手的作业范围要求能够进行封闭的空间区域内进行作业,因此设计的机械手的作业区域主要受到机械手的设计的尺寸控制,因此本文在进行尺寸综合设计时,才能确定机械手的作业范围。
简易机械手的工作运动速度
机械手装置的第六轴的法兰盘的中心点的作业速度的大小能够确定机械手的运动速度,该速度的大小受限于电机的选择速度及机械手的连杆的长度及减速器的参数等条件共同作用,因此本文设计的法兰盘的中心点处的速度设计为:4m/s。
简易机械手的总体形式
结合多次的方案论证,形成的简易的六轴机械手的可行性方案如下,首先研究机械手的作业形式如下。
直角坐标机器人
直角坐标机器中应用较多有两自由度的直角坐标机器和三自由度的直角坐标机器人,形式如图3.1.1及3.1.2所示。常见的直角坐标机器人又称为桁架机器人,该形式的机器人具有设备结构简单,操作方便,维护较为方便,广泛的被应用在金属加工机床、冲压机床、注塑机上下料领域。
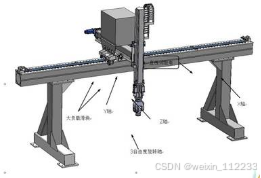
图3.1.1 两自由度直角坐标机器人

图3.1.2 三自由度直角坐标机器人
关节机器人
关节机器人的连杆与连杆的连接位置都是由转动副所构成,在关节机器人中最为普遍的为六轴的工业机器人和四轴的码垛机器人,六轴的工业机器人的作业功能较为广泛被使用在焊接作业领域中,四轴码垛机器相对于六轴机器人来说,码垛机器人的五轴及六轴是固定的[8],因此,作业机器人只能实现法兰盘相对于地面的平行,六轴关节机器人码垛机器人如图3.1.4所示。

图3.1.4 码垛机器人
球面坐标机器人、柱面坐标机器、水平多关节机器人、并联机器人
球面坐标机器人的作业运动副包括两个转动副和一个移动副构成(如图3.1.5),柱面坐标机器人运动副包括一个转动副和两个移动副(如图3.1.6),水平多关节机器人包括两个转动副和一个移动副(如图3.1.7),并联机器人结构中由多个移动度及一个转动副所构成(如图3.1.8),并联机器人具有作业效率较高,动作十分敏捷的特点。
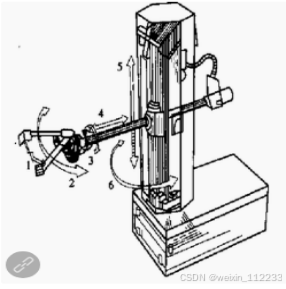
图3.1.6 柱面坐标机器人

图3.1.7 水平多关节机器人

图3.1.8 并联机器人
结合上述机械手的工作形式及使用领域,工作的特点等要求,本文综合论证选择简易的六轴机械手的形式为关节式机械手。
2 简易机械手大臂部结构设计
2.1 大臂部设计基本要求
机械手的大臂在整个六关节的机械手的作业中起到至关重要的作业,机械手的作业空间及作业能力主要依托大臂完成作业,因此设计时,需要满足设计的基本要求:
(1)为了减低驱动电机的工作负载,因此设计的大臂的质量需要尽可能的轻便;
(2)为了能够使得机械手的运动灵活性增加,因此大臂需要具有较高的运动速度,运动时的运动惯量设计较低。
(3)大臂要求运动的位置精度需要进一步提高[11]。
2.2 大臂部结构设计
考虑到大臂设计要求,因此本文设计的简易机械手的大臂从材料选择上选择质量相对较轻的铸铝材料,材料具有质量较轻,材料的使用强度较高的优点,能够满足本文的设计使用。
3.3.3 大臂驱动电机及减速器选型
电动机作为市场上已经成熟的标准化、规格化的成型产品,在机械设计领域,只要合理的选择电动机的参数,在本文的设计中,本文从电动机的输出功率、工作条件及设计的经济型要求考虑,在电动机产品中满足上述参数要求,确定型号。
电动机作为驱动原动机的主要零部件之一,电动机的形式的选择与工作环境是分不开的,可以参考电动机的电源的种类及工作条件及工作的负载的情况进行综合考虑。
直流电动机的主要的优点:市场电机较为容易采购,使用的电机的功率较大,能够满足大功率的功率机械设备的使用。直流电动机主要缺点为:设计的装置需要设计减速机,通常电机的电流需要较大,较难实现装配,控制较为复杂。
步进电动机主要的优点是设备的运动精度较高,设备的设计型号较为广泛,适合较多设备的使用,电动机的接口形式简单,容易使用,市场价格较低。因此,设计的电机的功率较小,使用时电机需要的电流较大,电机的结构不紧凑,体积较高,与其他装置进行装配较为困难,电机的承载能力较低,总功率较小,控制难度较大,运动精度较低。
考虑到本文设计的简易机械手的作业要求平稳及设备的控制简单可靠等要求,因此设计的简易机械手的电机选择为步进电机进行驱动。
3 三维建模
在整理完基本数据之后开始进行三维模型的制作,这里列举一到两个不见的三维建模制作过程,本次三维建模使用的是solidworks2019建模软件,这款软件在同级别软件中处于较高级的水平,其系列产品问世时间也十分长远,是一款有着质量保证的建模软件。本次三维模型制作主要以表达六轴机械手的结构,外观,作业运动仿真为主要目的,细节上可能会稍加欠妥。
完成主体之后继续细节的制作,在矩形上方点击【草图】—【草图绘制】,进入草图编辑页面,选择功能栏中的【矩形】,【圆】功能来绘制手腕处上部细节,并输入对应的数据,之后利用【剪裁实体】功能将多余部分删除,利用【拉伸切除】去掉对应小矩形部分,拉伸出绘制的各类按钮,再按着预期进行尾部细节的制作,手法大相径庭,从而完成细节部分的草图绘制,最终手腕处零部件如图4.1.6所示。
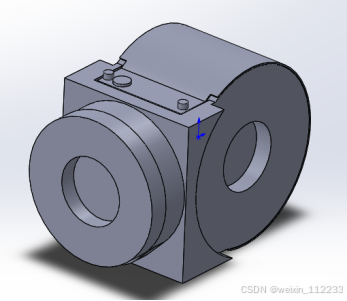
图 4.1.6整体效果展示
4 整体渲染
接下来对三维模型装配体进行渲染作业,首先在solidworks2019中打开成品六轴机械手装配体,进入【外观,布景和贴图】功能页面,选择装配体整体,应用到零部件层,如图5.1所示。
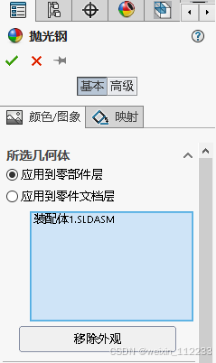
图5.1 渲染选项示意图
经过各种角度调节以及打光等细节操作,装配体整体渲染到此就基本完成,由于使用的是solidworks 2019的内部自带渲染功能,成果可能不如专业软件鲜明,但作为产品展示的目的可以达到,整体效果如图5.6所示,较好的表现了机械手整体的线条感以及机械化风格。
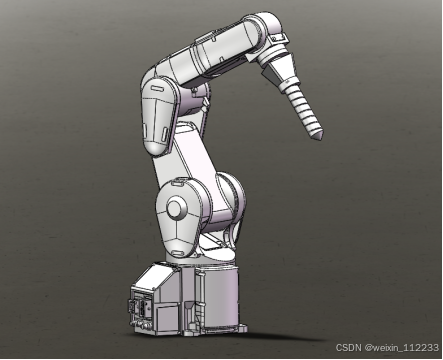
图5.6 三维装配渲染图
5 结 论
在中国的工业化进程速度的加快,原有的企业依赖人工作业生产的弊端已经完全的展现出来,主要表现在人工作业生产作业效率低下,设备较为老旧故障率较高,人力成本的不断上升,企业面临的招工难等问题。与此同时现代化的工业机器人代替人工完成作业,使得设备能够实现工业机器人作业效率快速提升的同时,能够实现节省人力,降低人工成本,但是相对作业复杂的工位,主要还是需要人工进行作业,机器人的无法实现人工的代替,基本上还是停留在使用传统的人工进行作业,作业效率较低,作业的效果较差,人力成本的浪费以及人工耗时耗力。
本文将设计步进电机六轴简易机械手设计,六轴机器人具有作业灵活且在工作空间内达到区域较好的优点,广发的使用在机床上下料,搬运,码垛,焊接,喷涂等作业场合,在中国智能制造的背景下,成为企业转型升级的机械的核心的设备。
本次设计从六轴工业机器人的发展及应用出发,致力于创造一种功能全面的机械手装置;其次,步进电机驱动的简易的六轴机械人的机械主体结构的设计,具体包含机器人的基座设计、大臂设计、小臂设计及机械的机械夹手部分的设计,进行简易机器人的驱动方式及传动方式的设计,具体包括驱动步进电机的选型计算,大臂内部的传动机构设计计算,小臂的内部传动机动的设计及计算等内容,最终,根据设计的传动零件的尺寸设计,运用CAD软件进行简易六轴机器人的装配图及零件图设计。

















 3546
3546

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









