







机械臂建模分析:https://blog.csdn.net/Kalenee/article/details/81990130
MoveIt规划下的关节空间运动分析:http://www.guyuehome.com/752
一、简介
在ROS平台下使用MoveIt进行机械臂控制时,默认调用AddTimeParameterization模块完成轨迹的运动规划,输出结果为各关节在对应时间帧下的关节位置与角速度,并没有机械臂末端的运动信息,为此需要通过rosbag完成运动规划的记录并结合Matlab完成操作空间的运动分析。
二、雅可比矩阵
2.1 数学意义
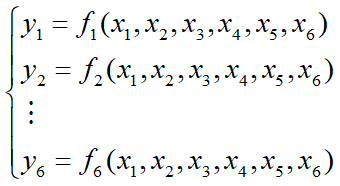
数学上雅可比矩阵(Jacobian matrix)是一个多元函数的偏导矩阵。设有六个拥有六个变量函数如下:
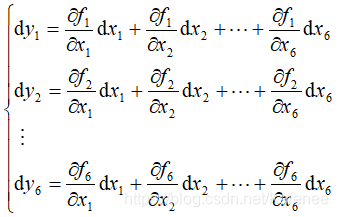
对六个函数微分后得:
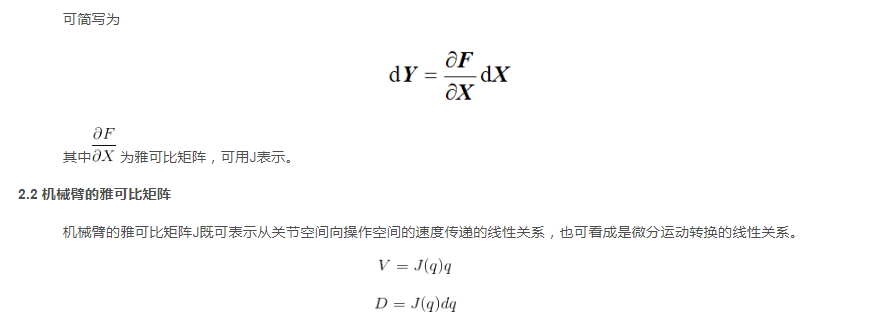
对于六轴机器人,其雅可比矩阵J(q)是
 阶矩阵,其中前3行代表对末端线速度V的传递比,后3行代表末端角速度W的传递比,同时矩阵每一列代表对应的关节速度对于末端速度和角速度的传递比, 其中
阶矩阵,其中前3行代表对末端线速度V的传递比,后3行代表末端角速度W的传递比,同时矩阵每一列代表对应的关节速度对于末端速度和角速度的传递比, 其中
 为对应关节n的单位关节速度,
为对应关节n的单位关节速度,
 和
和
 分别为对应关节n的单位关节速度对末端线速度和角速度的影响。
分别为对应关节n的单位关节速度对末端线速度和角速度的影响。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 265
265











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









