







引文格式:王高杰,郝向阳,欧阳文,等.定位点分布对相机位姿解算精度影响分析[J].导航定位学报,2020, 8(6): 21-28.(WANG Gaojie, HAO Xiangyang, OUYANG Wen,et al. Influence analysis of location point distribution on solution accuracy of camera pose[J]. Journal of Navigation and Positioning, 2020, 8(6): 21-28.)DOI:10.16547/j.cnki.10-1096.20200604.
定位点分布对相机位姿解算精度影响分析
王高杰,郝向阳,欧阳文,郑 凯,李朋月
(信息工程大学 地理空间信息学院,郑州 450000)
摘要:针对单目相机位姿解算过程中,定位点的分布会对解算精度产生影响的问题,提出1种分析方法:基于奥普蒂·特拉克(OptiTrack)运动捕捉系统,建立相机位姿解算实验平台,分析定位点的不同构型对于位姿解算精度的影响;并提出人工标志的布设和点位选择的相关建议;最后采用位置精度衰减因子(PDOP)值对定位点构型进行描述。实验结果表明:PDOP值小于30时,82% 以上的实验结果整体定位误差小于30mm,65%以上的实验结果各个方向姿态角解算误差小于10′;在一定范围内,相机与定位点距离和定位误差成正相关;人工标志的布设应充分考虑点位的分布情况,保证每张照片中都存在至少4个构型良好的定位点;在定位点较多时,可以考虑根据相机的概略位置选择构型良好的定位点进行位姿解算,以提高解算精度。
关键词:位姿解算;点位构型;精度分析;单目相机;人工标志
0 引言
基于单目相机的视觉导航过程,需要进行相机位姿的实时解算。使用人工标志的视觉导航方式,需要通过识别人工标志获取精确的3维点,利用物点与像点的透视关系式解算出相机中心相对于世界坐标系的位置和姿态,是视觉导航1种重要的手段。在人工标志无法密集布设的情况下,标志点的分布对于相机位姿估计具有一定的影响;分析定位点的构型与位姿解算精度的关系,对于设计更加实用准确的人工标志分布方案,以及位姿解算过程中的点位选择真有重要意义。 目前受限于计算机技术的发展,无论对室内导航还是室外导航,都很难进行高速率的场景建模。因此,广泛运用基于人工地标的识别定位方法来实现定位 [1]。当前比较有代表性的是由密西根大学阿普里尔(April)实验室开发的阿普里尔·塔格(AprilTag)视觉基准系统 [2]。AprilTag可以识别单个或者多个人工标志,很好地解决了传统的人工标志受环境、光照等条件影响时,识别出错率较高的问题,可以进一步提升识别效率与定位精度 [3];但是实现这一目标对于AprilTag标志布设的要求比较高。 本文使用精确标定的相机获取图像信息,在奥普蒂·特拉克(OptiTrack)运动捕捉系统下,获得准确的人工标志定位点坐标以及相机中心的概略位置和相机姿态,重点研究人工标志定位点的分布对于单目位姿解算精度的影响,并对视觉导航过程中,人工标志的布设,以及位姿解算过程中,点位的选择提出合理的方案和建议。1 原理及流程
本节对相机标定、标志点坐标提取、n点透视问题(n point perspective problem,PnP)和点位构型的描述进行介绍。实验流程如图1所示。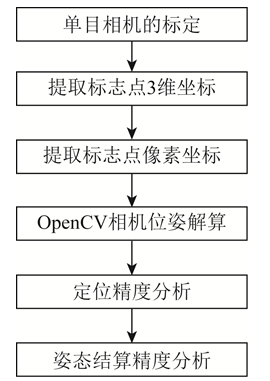
图1 实验流程
主要包括相机的标定、标志点准确3维坐标的获取、图像中定位点坐标的提取、相机位姿的解算和精度的分析。1.1相机标定
实验中采用Canon 65X相机,拍摄照片的分 辨率为3264 × 2448个像素。文献[4]的相机标定方法,相对于其他标定方法,具有操作简单、标定板 制作容易、对应点匹配简单等特点,因而本文主要采用张正友相机标定方法。文献[4]相机标定流程如下:读取相 机拍摄的棋盘格照片、提取角点并绘图、生成角点像素坐标、最大似然求单应矩阵、建立约束方程、奇异值分解( singular value decomposition, SVD )得唯一解、乔列斯基(Cholesky)分解得到内参矩阵、计算外参数矩阵、标定完成。 如图2所示,从不同角度拍摄12张棋盘格照片,利用开源计算机视觉库(OpenCV)中的标定函数calibrateCamera进行相机标定。输入的参数包括:12张棋盘格照片路径,棋盘格大小8×11 格,棋盘格每个单元宽度为20 mm。
图2
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 627
627











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









