






本节要点
· 掌握MoveAbsJ指令的使用
· 了解robtarget和jointtarget数据的区别
· 了解MoveJ和MoveAbsJ的区别
要点解析
MoveAbsJ 指令
MoveAbsJ 指令:移动机械臂至绝对位置。机器人以单轴运动的方式运动至目标点,不存在死点,运动状态完全不可控制,避免在正常生产中使用此命令。指令中TCP 与 Wobj只与运动速度有关,与运动位置无关。MoveAbsJ 指令常用于检查机器人零点位置,其指令示例如下图所示。

MoveAbsJ 指令示例
robtarget 和 jointtarget 数据的区别
robtarget:以机器人 TCP 点的位置和姿态记录机器人位置。用于 MoveJ、MoveL、MoveC 指令中。
jointtarget:以机器人各个关节值来记录机器人位置,常用于机器人运动至特定的关节角。用于MoveAbsJ 指令中。
MoveJ 和 MoveAbsJ 的区别
MoveJ 和 MoveAbsJ 的运动轨迹相同,都是以关节方式运动,所不同的是所采用的数据点类型不同。
操作步骤
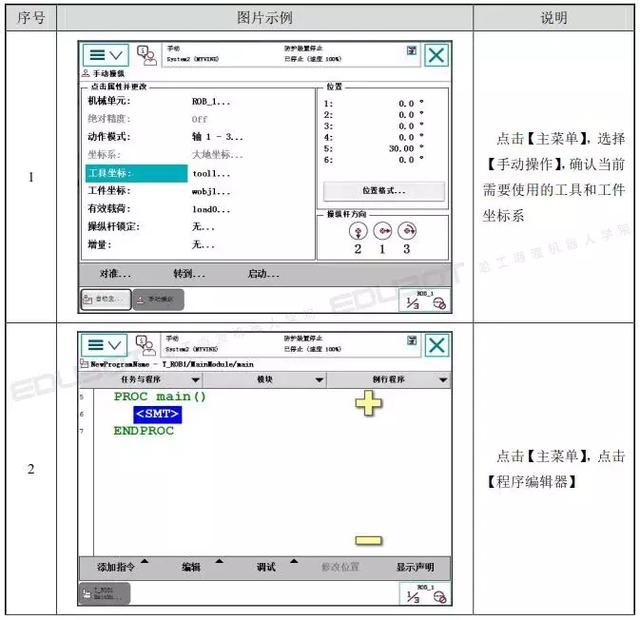
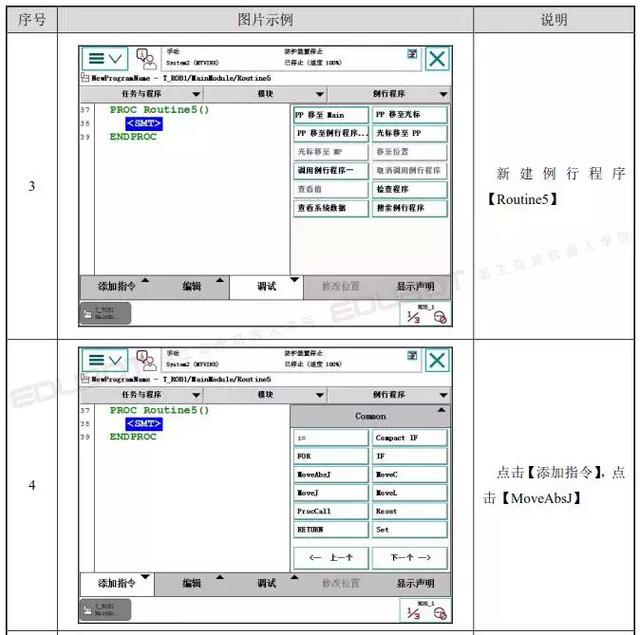
程序编写
程序编写的操作步骤见下表。



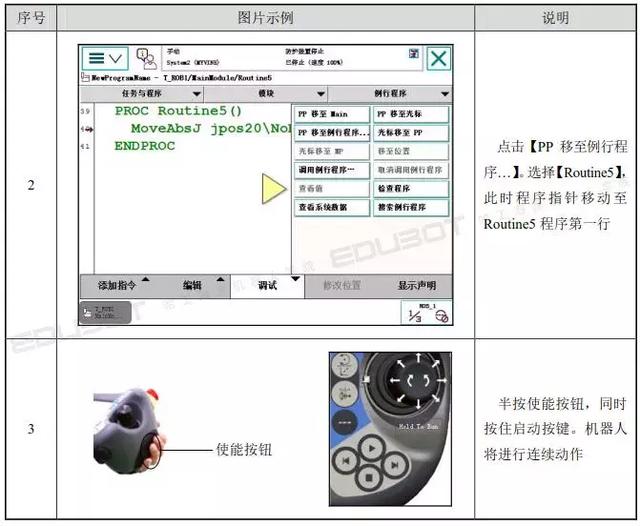
程序调试
程序调试的操作步骤见下表。

具体操作视频请进入海渡学院APP免费观看!QQ交流群:563403891














 4009
4009











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









