







基于之前对二次规划的粗鄙描述: Lattice Planner从学习到放弃(二):二次规划的应用与调试发现遗漏了如何建立矩阵P…后来再看,其实理解的并不透彻,这次补上。
Apollo中lattice planner中存在两种求解方法,一种是撒点后根据起始状态直接求解五次多项式,一种是纵向s均匀采样后根据bound构建二次型实现数值优化求解。基于数值优化求解,lattice和pwj在横向规划方面,构建目标函数存在差异,求解过程并无二致。
引用老哥 决策规划算法四:Piecewise Jerk Path Optimizer 的话:该路径平滑算法用3次多项式连接每个离散点,即每段曲线的Jerk为常数,该算法因此而得名:Piecewise Jerk Path Optimizer.
优化问题解析
规划的目的是在有限的约束下按照一定目标计算出我们想要的轨迹。即:目标+约束。
决策:从当前环境中给出一个粗范围,建立一个局部空间将车辆面对的复杂情况凸化,用于后续快速求解
规划:基于当前空间,求解出符合需求的可行轨迹
用图说话:
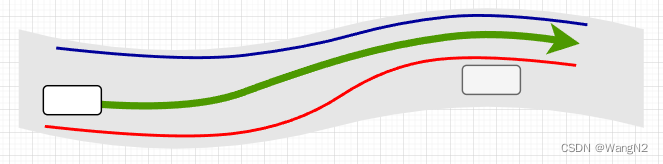
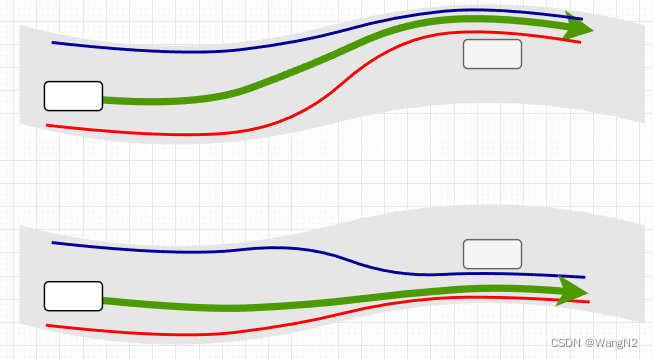
对于这个场景而言,决策单一且清晰,只需要设置合理的bound,进行规划求解即可。然而,实际的行车条件是复杂多变的,对于下述场景(凹问题,且障碍物还是静止的),决策结果将会是多样的:左绕行、右绕行、停车。没有合理的决策将会让系统行为显得很傻,一旦明确从左还是从右,剩下的问题自然迎刃而解,这便是决策的重要性。
Planning优化问题的本质便是在这约束内,计算出最优的轨迹。
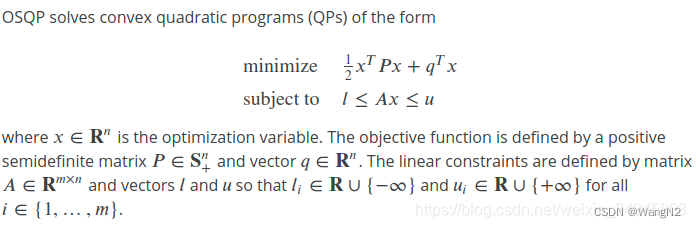
二次规划求解
关键在于如何将规划问题转换成如下QP形式。
构建优化目标
对于横向规划,以下图情况为例,我们希望自车在车道不沿车道中心线,而是略微靠右行驶:

定义状态量
x
=
[
l
0
,
l
1
,
.
.
.
l
n
,
l
0
′
,
l
1
′
,
.
.
.
l
n
′
,
l
0
′
′
,
l
1
′
′
,
.
.
.
l
n
′
′
]
T
x = [l_0, l_1,...l_n,l_0', l_1',...l_n',l_0'', l_1'',...l_n'']^T
x=[l0,l1,...ln,l0′,l1′,...ln′,l0′′,l1′′,...ln′′]T
整理优化目标:
-
横向位移
1.轨迹贴合车道指引线
J l = ∑ i = 0 n − 1 l i 2 J_l = \sum_{i=0}^{n-1} l_i^2 Jl=i=0∑n−1li2
2.轨迹贴合期望路径
J l _ r e f = ∑ i = 0 n − 1 ( l i − l _ r e f i ) 2 J_{l\_ref} = \sum_{i=0}^{n-1} (l_i - l\_ref_i)^2 Jl_ref=i=0∑n−1(li−l_refi)2
3.指定轨迹目标末点
J l e n d = ∑ i = n − 1 n − 1 ( l n − l e n d ) 2 J_{l_{end}} = \sum_{i=n-1}^{n-1} (l_n-l_{end})^2 Jlend=i=n−1∑n−1(ln−lend)2 -
横向速度
1.轨迹相对于指引线的横向速度
J l ′ = ∑ i = 0 n − 1 l i ′ 2 J_{l'} = \sum_{i=0}^{n-1} l_i'^2 Jl′=i=0∑n−1li′2
2.轨迹相对末点的横向速度
J l _ e n d ′ = ∑ i = n − 1 n − 1 ( l i ′ − l _ e n d ′ ) 2 J_{l\_end'} = \sum_{i=n-1}^{n-1} (l_i' - l\_end')^2 Jl_end′=i=n−1∑n−1(li′−l_end′)2 -
横向加速度
轨迹相对于指引线的横向加速度
J l ′ ′ = ∑ i = 0 n − 1 l i ′ ′ 2 J_{l''} = \sum_{i=0}^{n-1} l_i''^2 Jl′′=i=0∑n−1li′′2
2.轨迹相对末点的横向速度
J l _ e n d ′ ′ = ∑ i = n − 1 n − 1 ( l i ′ ′ − l _ e n d ′ ′ ) 2 J_{l\_end''} = \sum_{i=n-1}^{n-1} (l_i'' - l\_end'')^2 Jl_end′′=i=n−1∑n−1(li′′−l_end′′)2 -
横向加加速度
轨迹相对于指引线的横向jerk
J j e r k = ∑ i = 0 n − 1 j e r k i 2 J_{jerk} = \sum_{i=0}^{n-1} jerk_i^2 Jjerk=i=0∑n−1jerki2
已知
j e r k i = l i ′ ′ ′ = l i + 1 ′ ′ − l i ′ ′ Δ s jerk_i = l_i''' = {l_{i+1}'' - l_{i}''\over \Delta s} jerki=li′′′=Δsli+1′′−li′′
可得横向jerk最终形式为
J j e r k = ∑ i = 0 n − 1 ( l i + 1 ′ ′ − l i ′ ′ Δ s ) 2 J_{jerk} = \sum_{i=0}^{n-1} ({l_{i+1}'' - l_{i}''\over \Delta s})^2 Jjerk=i=0∑n−1(Δsli+1′′−li′′)2
最终,我们对每种优化目标施以权重来得到最终的优化目标:
J t a r g e t = W l ⋅ J l + W l r e f ⋅ J l _ r e f + W l e n d ⋅ J l e n d + W l ′ ⋅ J l ′ + W l _ e n d ′ ⋅ J l _ e n d ′ + W l ′ ′ ⋅ J l ′ ′ + W l _ e n d ′ ′ ⋅ J l _ e n d ′ ′ + W j e r k ⋅ J j e r k = ( W l + W l r e f ) ⋅ ∑ i = 0 n − 1 l i 2 − 2 W l r e f ⋅ ∑ i = 0 n − 1 l i ⋅ l _ r e f i + W l r e f ⋅ ∑ i = 0 n − 1 l r e f 2 + W l e n d ( l n − 1 ) 2 − 2 W l e n d ⋅ l n − 1 l e n d + W l e n d ( l e n d ) 2 + W l ′ ⋅ ∑ i = 0 n − 1 l i ′ 2 + W l e n d ′ ( l n − 1 ′ ) 2 − 2 W l e n d ′ ⋅ l n − 1 ′ l e n d ′ + W l e n d ′ ( l e n d ′ ) 2 + W l ′ ′ ⋅ ∑ i = 0 n − 1 l i ′ ′ 2 + W l e n d ′ ′ ( l n − 1 ′ ′ ) 2 − 2 W l e n d ′ ′ ⋅ l n − 1 ′ ′ l e n d ′ ′ + W l e n d ′ ′ ( l e n d ′ ′ ) 2 + W l ′ ′ ′ ⋅ ( 1 Δ s ) 2 ⋅ ∑ i = 0 n − 1 ( l i + 1 ′ ′ 2 + l i ′ ′ 2 ) − 2 W l ′ ′ ′ ⋅ 1 Δ s 2 ⋅ ∑ i = 0 n − 1 l i + 1 ′ ′ l i ′ ′ = ( W l + W l r e f ) ⋅ ∑ i = 0 n − 1 l i 2 + W l e n d ( l n − 1 ) 2 + W l ′ ⋅ ∑ i = 0 n − 1 l i ′ 2 + W l e n d ′ ( l n − 1 ′ ) 2 + ( W l ′ ′ + W l ′ ′ ⋅ 1 Δ s 2 ) ⋅ ∑ i = 0 n − 1 l i ′ ′ 2 + W l ′ ′ ⋅ 1 Δ s 2 ⋅ l i + 1 ′ ′ 2 − 2 W l r e f ⋅ ∑ i = 0 n − 1 l i ⋅ l _ r e f i − 2 W l e n d ⋅ l n − 1 l e n d − 2 W l e n d ′ ⋅ l n − 1 ′ l e n d ′ − 2 W l e n d ′ ′ ⋅ l n − 1 ′ ′ l e n d ′ ′ + C o n s t J_{target} = W_l \cdot J_l + W_{l_{ref}} \cdot J_{l\_ref} + W_{l_{end}} \cdot J_{l_{end}} + W_{l'} \cdot J_{l'} + W_{l\_end'} \cdot J_{l\_end'} + W_{l''} \cdot J_{l''} + W_{l\_end''} \cdot J_{l\_end''} + W_{jerk} \cdot J_{jerk} \\ = (W_l+W_{l_{ref}})\cdot \sum_{i=0}^{n-1} l_i^2 - 2W_{l_{ref}}\cdot \sum_{i=0}^{n-1} l_i\cdot l\_ref_i + W_{l_{ref}}\cdot \sum_{i=0}^{n-1} l_{ref}^2 + W_{l_{end}}(l_{n-1})^2 - 2W_{l_{end}}\cdot l_{n-1}l_{end} + W_{l_{end}}(l_{end})^2 \\ + W_{l'}\cdot \sum_{i=0}^{n-1} l_i'^2 + W_{l_{end}'}(l_{n-1}')^2 - 2W_{l_{end}'}\cdot l_{n-1}'l_{end}' + W_{l_{end}'}(l_{end}')^2 \\ + W_{l''}\cdot \sum_{i=0}^{n-1} l_i''^2 + W_{l_{end}''}(l_{n-1}'')^2 - 2W_{l_{end}''}\cdot l_{n-1}''l_{end}'' + W_{l_{end}''}(l_{end}'')^2 \\ + W_{l'''}\cdot ({1\over \Delta s})^2 \cdot \sum_{i=0}^{n-1} (l_{i+1}''^2 + l_{i}''^2 ) - 2W_{l'''}\cdot {1\over \Delta s^2} \cdot \sum_{i=0}^{n-1} l_{i+1}'' l_{i}'' \\ = (W_l+W_{l_{ref}})\cdot \sum_{i=0}^{n-1} l_i^2 + W_{l_{end}}(l_{n-1})^2 + W_{l'}\cdot \sum_{i=0}^{n-1} l_i'^2 + W_{l_{end}'}(l_{n-1}')^2 + (W_{l''} + W_{l''} \cdot {1\over \Delta s^2}) \cdot \sum_{i=0}^{n-1} l_i''^2 + W_{l''} \cdot {1\over \Delta s^2}\cdot l_{i+1}''^2 - 2W_{l_{ref}}\cdot \sum_{i=0}^{n-1} l_i\cdot l\_ref_i - 2W_{l_{end}}\cdot l_{n-1}l_{end} - 2W_{l_{end}'}\cdot l_{n-1}'l_{end}' - 2W_{l_{end}''}\cdot l_{n-1}''l_{end}'' + Const Jtarget=Wl⋅Jl+Wlref⋅Jl_ref+Wlend⋅Jlend+Wl′⋅Jl′+Wl_end′⋅Jl_end′+Wl′′⋅Jl′′+Wl_end′′⋅Jl_end′′+Wjerk⋅Jjerk=(Wl+Wlref)⋅i=0∑n−1li2−2Wlref⋅i=0∑n−1li⋅l_refi+Wlref⋅i=0∑n−1lref2+Wlend(ln−1)2−2Wlend⋅ln−1lend+Wlend(lend)2+Wl′⋅i=0∑n−1li′2+Wlend′(ln−1′)2−2Wlend′⋅ln−1′lend′+Wlend′(lend′)2+Wl′′⋅i=0∑n−1li′′2+Wlend′′(ln−1′′)2−2Wlend′′⋅ln−1′′lend′′+Wlend′′(lend′′)2+Wl′′′⋅(Δs1)2⋅i=0∑n−1(li+1′′2+li′′2)−2Wl′′′⋅Δs21⋅i=0∑n−1li+1′′li′′=(Wl+Wlref)⋅i=0∑n−1li2+Wlend(ln−1)2+Wl′⋅i=0∑n−1li′2+Wlend′(ln−1′)2+(Wl′′+Wl′′⋅Δs21)⋅i=0∑n−1li′′2+Wl′′⋅Δs21⋅li+1′′2−2Wlref⋅i=0∑n−1li⋅l_refi−2Wlend⋅ln−1lend−2Wlend′⋅ln−1′lend′−2Wlend′′⋅ln−1′′lend′′+Const
拆解目标函数为二次型形式
目标函数已经列完,合并该合并的,常数项统统并为const,并不会影响目标求解。根据状态量x,
矩阵P如下:
[
W
l
+
W
l
r
e
f
0
⋯
⋯
0
0
⋯
⋯
0
0
⋯
⋯
⋯
0
0
W
l
+
W
l
r
e
f
0
⋯
⋮
⋮
⋯
⋯
⋮
⋮
⋯
⋯
⋯
⋮
⋮
0
W
l
+
W
l
r
e
f
0
⋮
⋮
⋯
⋯
⋮
⋮
⋯
⋯
⋯
⋮
⋮
⋮
0
⋱
0
⋮
⋯
⋯
⋮
⋮
⋯
⋯
⋯
⋮
0
⋯
⋯
0
W
l
+
W
l
r
e
f
+
W
l
e
n
d
0
⋯
⋯
⋮
⋮
⋯
⋯
⋯
⋮
0
⋯
⋯
⋯
0
W
l
′
0
⋯
⋮
⋮
⋯
⋯
⋯
⋮
⋮
⋮
⋮
⋮
⋮
0
W
l
′
0
⋮
⋮
⋯
⋯
⋯
⋮
⋮
⋮
⋮
⋮
⋮
⋮
0
⋱
0
⋮
⋯
⋯
⋯
⋮
0
⋯
⋯
⋯
⋯
⋯
⋯
0
W
l
′
+
W
l
e
n
d
′
0
⋯
⋯
⋯
⋮
0
⋯
⋯
⋯
⋯
⋯
⋯
⋯
0
W
l
′
′
+
W
l
′
′
′
⋅
1
Δ
s
2
0
⋯
⋯
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
0
−
2
W
l
′
′
′
⋅
1
Δ
s
2
W
l
′
′
+
2
W
l
′
′
′
⋅
1
Δ
s
2
0
⋯
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
0
⋱
⋱
0
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
⋮
0
−
2
W
l
′
′
′
⋅
1
Δ
s
2
W
l
′
′
+
2
W
l
′
′
′
⋅
1
Δ
s
2
0
0
⋯
⋯
⋯
⋯
⋯
⋯
⋯
⋯
⋯
⋯
⋯
−
2
W
l
′
′
′
⋅
1
Δ
s
2
W
l
′
′
+
W
l
′
′
′
⋅
1
Δ
s
2
]
\begin{bmatrix} W_{l}+W_{l_{ref}} & 0 &\cdots &\cdots & 0 & 0 &\cdots &\cdots &0 & 0 &\cdots &\cdots &\cdots & 0 \\ 0 & W_{l}+W_{l_{ref}} & 0 &\cdots & \vdots & \vdots &\cdots &\cdots & \vdots & \vdots &\cdots &\cdots &\cdots &\vdots\\ \vdots & 0 & W_{l}+W_{l_{ref}} & 0 & \vdots & \vdots &\cdots &\cdots & \vdots & \vdots &\cdots &\cdots &\cdots &\vdots\\ \vdots & \vdots & 0 & \ddots &0 & \vdots &\cdots &\cdots & \vdots & \vdots &\cdots &\cdots &\cdots &\vdots\\ 0 & \cdots & \cdots &0 & W_{l}+W_{l_{ref}}+W_{l_{end}} & 0 &\cdots &\cdots & \vdots & \vdots &\cdots &\cdots &\cdots &\vdots\\ 0 &\cdots &\cdots &\cdots & 0 & W_{l'} & 0 &\cdots & \vdots & \vdots &\cdots &\cdots &\cdots &\vdots\\ \vdots & \vdots & \vdots &\vdots & \vdots & 0 & W_{l'} & 0 & \vdots & \vdots &\cdots &\cdots &\cdots &\vdots\\ \vdots & \vdots & \vdots &\vdots & \vdots & \vdots & 0 & \ddots & 0 &\vdots &\cdots &\cdots &\cdots &\vdots\\ 0 &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots & 0 & W_{l'}+W_{l_{end}'} & 0 &\cdots &\cdots &\cdots &\vdots\\ 0 & \cdots &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots & 0 & W_{l''}+W_{l'''} \cdot {1\over \Delta s^2} &0 &\cdots &\cdots &\vdots \\ \vdots & \vdots & \vdots &\vdots & \vdots & \vdots & \vdots &\vdots & 0 & -2W_{l'''} \cdot {1\over \Delta s^2} & W_{l''}+2W_{l'''} \cdot {1\over \Delta s^2} &0 &\cdots &\vdots\\ \vdots & \vdots & \vdots &\vdots & \vdots & \vdots & \vdots &\vdots &\vdots & 0 & \ddots & \ddots & 0 & \vdots\\ \vdots & \vdots & \vdots &\vdots & \vdots & \vdots & \vdots &\vdots &\vdots &\vdots & 0 & -2W_{l'''} \cdot {1\over \Delta s^2} & W_{l''}+2W_{l'''} \cdot {1\over \Delta s^2} & 0\\ 0 &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots &\cdots & -2W_{l'''} \cdot {1\over \Delta s^2} & W_{l''}+W_{l'''} \cdot {1\over \Delta s^2}\\ \end{bmatrix}
Wl+Wlref0⋮⋮00⋮⋮00⋮⋮⋮00Wl+Wlref0⋮⋯⋯⋮⋮⋯⋯⋮⋮⋮⋯⋯0Wl+Wlref0⋯⋯⋮⋮⋯⋯⋮⋮⋮⋯⋯⋯0⋱0⋯⋮⋮⋯⋯⋮⋮⋮⋯0⋮⋮0Wl+Wlref+Wlend0⋮⋮⋯⋯⋮⋮⋮⋯0⋮⋮⋮0Wl′0⋮⋯⋯⋮⋮⋮⋯⋯⋯⋯⋯⋯0Wl′0⋯⋯⋮⋮⋮⋯⋯⋯⋯⋯⋯⋯0⋱0⋯⋮⋮⋮⋯0⋮⋮⋮⋮⋮⋮0Wl′+Wlend′00⋮⋮⋯0⋮⋮⋮⋮⋮⋮⋮0Wl′′+Wl′′′⋅Δs21−2Wl′′′⋅Δs210⋮⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯0Wl′′+2Wl′′′⋅Δs21⋱0⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯0⋱−2Wl′′′⋅Δs21⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯0Wl′′+2Wl′′′⋅Δs21−2Wl′′′⋅Δs210⋮⋮⋮⋮⋮⋮⋮⋮⋮⋮⋮0Wl′′+Wl′′′⋅Δs21
矩阵Q如下:
[
−
2
⋅
W
l
⋅
l
r
e
f
⋮
⋮
−
2
⋅
W
l
⋅
l
r
e
f
−
2
⋅
W
l
⋅
l
r
e
f
−
2
⋅
W
l
e
n
d
⋅
l
r
e
f
0
⋮
0
−
2
⋅
W
l
e
n
d
′
⋅
l
r
e
f
′
0
⋮
0
−
2
⋅
W
l
e
n
d
′
′
⋅
l
r
e
f
′
′
]
\begin{bmatrix} -2\cdot W_{l} \cdot {l_{ref}} \\ \vdots \\ \vdots \\ -2\cdot W_{l} \cdot {l_{ref}} \\ -2\cdot W_{l} \cdot {l_{ref}} - 2\cdot W_{l_{end}} \cdot {l_{ref}} \\ 0 \\ \vdots \\ 0 \\ -2\cdot W_{l_{end}'} \cdot {l_{ref}'} \\ 0 \\ \vdots \\ 0 \\ -2\cdot W_{l_{end}''} \cdot {l_{ref}''} \\ \end{bmatrix}
−2⋅Wl⋅lref⋮⋮−2⋅Wl⋅lref−2⋅Wl⋅lref−2⋅Wlend⋅lref0⋮0−2⋅Wlend′⋅lref′0⋮0−2⋅Wlend′′⋅lref′′
高能预警:上述优化目标函数中,ds为定值即求解过程为定步长,在实际问题建立中,s一旦不为定步长,将会导致求解结果不符合预期。
构建约束
PWJ约束定义没有本质区别,依然是满足运动学约束,外加横向jerk bound,可戳:Lattice Planner从学习到放弃(二):二次规划的应用与调试
代码实现
Apollo源码里结构很清晰,主体函数:
bool PiecewiseJerkProblem::Optimize(const int max_iter) {
OSQPData* data = FormulateProblem();
...
}
在FormulateProblem()函数中实现二次型的构建:
OSQPData* PiecewiseJerkProblem::FormulateProblem() {
// calculate kernel
std::vector<c_float> P_data;
std::vector<c_int> P_indices;
std::vector<c_int> P_indptr;
CalculateKernel(&P_data, &P_indices, &P_indptr);
// calculate affine constraints
std::vector<c_float> A_data;
std::vector<c_int> A_indices;
std::vector<c_int> A_indptr;
std::vector<c_float> lower_bounds;
std::vector<c_float> upper_bounds;
CalculateAffineConstraint(&A_data, &A_indices, &A_indptr, &lower_bounds,
&upper_bounds);
// calculate offset
std::vector<c_float> q;
CalculateOffset(&q);
OSQPData* data = reinterpret_cast<OSQPData*>(c_malloc(sizeof(OSQPData)));
CHECK_EQ(lower_bounds.size(), upper_bounds.size());
size_t kernel_dim = 3 * num_of_knots_;
size_t num_affine_constraint = lower_bounds.size();
data->n = kernel_dim;
data->m = num_affine_constraint;
data->P = csc_matrix(kernel_dim, kernel_dim, P_data.size(), CopyData(P_data),
CopyData(P_indices), CopyData(P_indptr));
data->q = CopyData(q);
data->A =
csc_matrix(num_affine_constraint, kernel_dim, A_data.size(),
CopyData(A_data), CopyData(A_indices), CopyData(A_indptr));
data->l = CopyData(lower_bounds);
data->u = CopyData(upper_bounds);
return data;
}
拓展
对于纵向规划而言,换汤不换药,只不过状态量变成了s和t相关。
对于pwj中函数:
piecewise_jerk_problem.set_x_ref()
可好好利用,通过设置x_ref可以通过软约束的行驶达到使车辆基于参考线实现偏移目的。
对于osqp求解器的实际求解过程,em…大神的文章着实给力:
路径规划中不得不知的OSQP
交替方向乘子法(ADMM)算法的流程和原理是怎样的
思考
得力于现在的工作环境,最近一直在从事基于规则优化的规划和基于ML的DDP(Data Driven Planning)规划,目前行业对数据驱动以及深度学习用于规划也是热火朝天,毕竟随着数据的指数级增长,如何使用这些海量数据成了Tire1和车企绕不开的问题。大量数据训练用以驱动自动驾驶的趋势显而易见。对于二者的配合方式,自己也有了一些困惑:ML为主,rule base只用于最后的兜底?亦或是 rule base为主,ML为其提供决策指导? 毕竟开车不是下棋,一步错棋或许还能补救,一个异常轨迹可能就是一个家庭。
虽然我司采用第一种且效果还不错,但面对依然偶发的异常行为,如果目的是快速落地并真正的服务于大众,或许第二种是最直接和稳定的?期待大佬给锤~~
每天进步一点点…come on















 1693
1693











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









