









目录
大家好,这里是程序员杰克。一名平平无奇的嵌入式软件工程师。
舵机目前在航模、小型机器人等方向的应用非常广泛。因此对于有DIY/设计需求的人来说,舵机的学习是必不可少的。本篇系列推送主要是对舵机的相关知识点进行总结和分享,主要分享舵机相关原理、以及驱动实现。
01 舵机介绍
-
舵机概述
舵机(Servo)是在程序的控制下,在一定范围内连续改变输出轴角度并保持的电机系统。即舵机只支持在一定角度内转动,无法像普通直流电机按圈转;其主要控制物体的转动并保持(机器人关节、转向机构)。适用于位置角度经常变化的场合。舵机外形如下图所示:

-
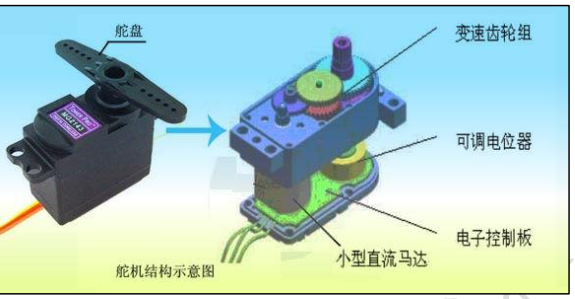
舵机组成
舵机主要由几个部分组成:外壳、舵盘、直流电机、减速齿轮组、位置反馈器、控制电路等;结构示意图如下图所示(图片来源于硬石电机专题手册):
-
舵机分类
| 分类方式 | 名称 | 描述 |
| 控制电路 | 模拟舵机 | 控制电路为纯模拟电路,需要一直发送控制信号才能转到指定位置;响应速度慢; |
| 数字舵机 | 控制电路加入了微控制器,只需要发送一次目标信号即可到达指定位置;有信息反馈等功能; | |
| 机械材质 | 塑料齿舵机 | 传动齿轮为塑料材质。舵机重量轻,价格便宜,但扭矩较小; |
| 金属齿舵机 | 传动齿轮为金属材质。结实耐用,扭矩更大,但价格更贵; | |
| 控制接口 | PWM舵机 | 传统航模控制方式,控制简单,MCU都可以产生控制; |
| 总线舵机 | 集成式控制方式,支持信息反馈,控制信号有所优化,使用在控制精度高的场合; |
-
舵机工作原理
舵机内部的控制电路接收来自信号线的PWM控制脉冲,控制电机旋转,电机带动减速齿轮组,最后传动输出至舵盘,进而使舵机转动角度并保持。控制流程如下图所示:

-
舵机内部基准电路产生了周期为20ms、脉宽为1.5ms的基准信号,其体现为反馈基准电压Vref;
-
控制电路捕获外部PWM控制信号,经处理后输出一个直流偏置电压Vin;
-
将直流偏置电压Vin和反馈基准电压Vref进行比较,输出电压差;
-
电压差输出到电机驱动芯片驱动电机,其中电压差的正负决定电机的正反转,压差大小决定旋转的角度,电压差为0时,电机停止转动;
特别注意:采集的控制信号主要是脉冲的宽度,要使舵机输出轴角度发生变化,改变的是脉冲宽度(PWM控制时是控制占空比)
-
舵机控制原理
舵机转动的角度与脉宽在0.5ms~2.5ms的区间内呈线性关系。舵机有90°、180°、270°、360°最大转角,这里以180°舵机为例来说明脉冲宽度和角度的关系,其他角度舵机参考具体参数,180°舵机周期为20ms时的脉宽和转角关系如下图:
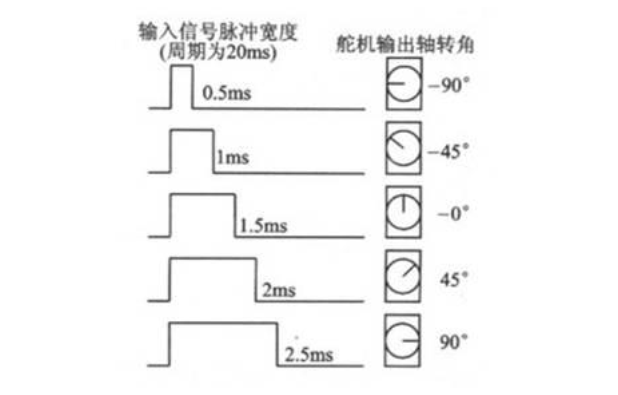
| 脉冲宽度 | 0.5ms | 1ms | 1.5ms | 2ms | 2.5ms |
| 转动角度 | -90° | -45° | 0° | 45° | 90° |
-
舵机参数
| 参数 | 描述 |
| 重量(g) | 舵机的总重量 |
| 尺寸(mm) | 舵机的外形尺寸 |
| 速度(sec/60°) | 舵机转过60°所需的时间 |
| 电压(V) | 舵机工作的电压范围 |
| 电流电流(A) | 舵机工作时的电流 |
| 温度(℃) | 舵机工作的温度范围 |
| 死区(us) | 1. 使舵机转动的最小脉冲宽度,低于该参数,舵机不转动; 2. 停止角度的精确度,该数值越小,控制精度越高; 理解说明: 此参数是用于吸收舵机在最终停止位置往返振荡所设置的。舵机接收到控制输入信号,然后与基准信号做差值,然后输出差值脉冲用于控制舵机内部直流电机正反转,经过齿轮组减速后,驱动舵盘和电位器转动,电位器输出反馈基准信号,直到电位器反馈的基准信号与输入信号完全一致时,舵机停止转动。 舵机实际运行到停止位置时,由于存在运动惯量,电位器输出的反馈基准信号与输入信号不能完全一致,差值脉冲在很小的范围内输出,导致舵机在停止位置附近往返振荡。 最小脉冲宽度的由来:为了解决往返振荡问题,在接近停止位附近用电路方式将差值脉冲吸收。 精确度误差的由来:由于差值脉冲被吸收掉,导致实际位置与目标位置存在差异;限值的差值脉冲越小,越接近目标位置。 死区参数优缺点: 优点:消除舵机在停止位置的往返振荡; 缺点:死区越小,精度越高,意味着死区范围内的差值脉冲调整越频繁;加剧对齿轮组和电位器的磨损; |
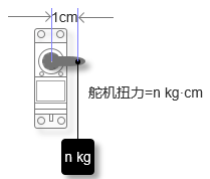
| 扭矩(kg*cm) | 舵机所能提供的最大扭矩。表示的是距离转动轴中心1cm处,舵机能够带动的重量。
|
-
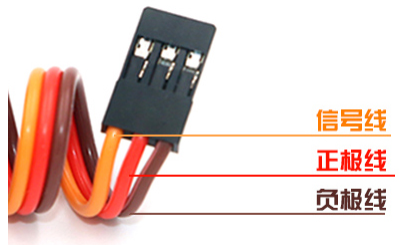
舵机实物连接线
舵机的有3条输入线,本人接触的舵机线序颜色为:中间红色线为电源正极,棕色线为电源负极,黄色线为控制信号线,具体如下图所示。特别说明:不同的厂商制作的舵机的输入线颜色可能会存在不一致,但一般中间的线为红色正极,信号线可能为白色,负极可能为黑色,具体还是要参考舵机的数据手册。
-
舵机硬件连接
舵机硬件连接比较简单,给对应的引脚接上对应的线便可。注意硬件上电源功率要满足舵机功率要求便可。
02 文章总结
舵机相对于其他运动电机来说,无论是对硬件电路的设计要求,还是运动控制都要简单很多,本篇推送最主要的是要了解舵机的工作原理和控制原理,为后续舵机的精准控制以及多舵机的协调运动奠定基础。


















 7678
7678

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











