







一、速度定义
1.1角速度矢量
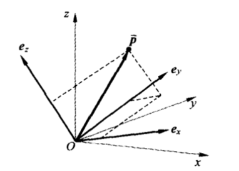
如下图所示,物体绕z轴以2 rad/s 的角速度转动。
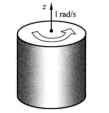
将该物体的角速度以矢量的形式表示:
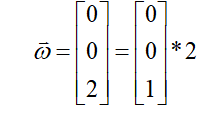
该式称为角速度矢量,物体的角速度矢量由所绕转轴的方向相同的单位矢量和一标量的乘积形式组成。
1.2速度矢量
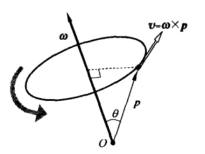
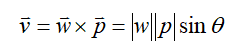
空间中任意位置,位置向量表示为的点,其速度定义为,该运算也称向量的叉积。速度矢量的方向同时垂直于角速度矢量和位置矢量,其方向可用右手定则进行判定。
二、旋转矩阵的导数及反对称矩阵
推导方式一:
推导方式二:

综合上述两种方法可以得到,旋转矩阵关于时间的求导:

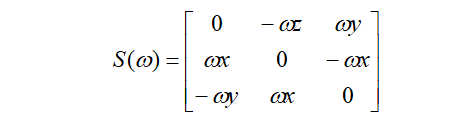
若角速度矢量表示为
其所对应的反对称矩阵为:(可根据叉积的计算方法推导)
三、速度的传递
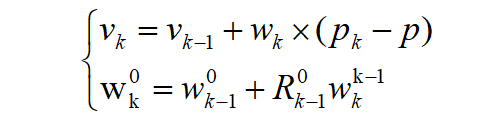
3.1 角度的传递

3.2 速度的传递(平动)
将局部坐标系中的一点转换为世界坐标系中的表示:

四、总结
整理得到速度的传递公式:
关注下方公众号获取前期仿真源码
















03-06
 1468
1468
1468
06-24
1335
1335
02-07
1949
1949
“相关推荐”对你有帮助么?
-

 非常没帮助
非常没帮助 -

 没帮助
没帮助 -

 一般
一般 -

 有帮助
有帮助 -

 非常有帮助
非常有帮助
提交

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









