








视频讲解:
复刻低成本机械臂 SO-ARM100 3D 打印篇
清理了下许久不用的3D打印机,挤出机也裂了,更换了喷嘴和挤出机夹具,终于恢复了正常工作的状态,接下来还是要用起来,不然吃灰生锈了,于是乎想起了之前仿真中的SO-ARM100这个机械臂,打算做一套玩玩
https://github.com/TheRobotStudio/SO-ARM100/tree/main#
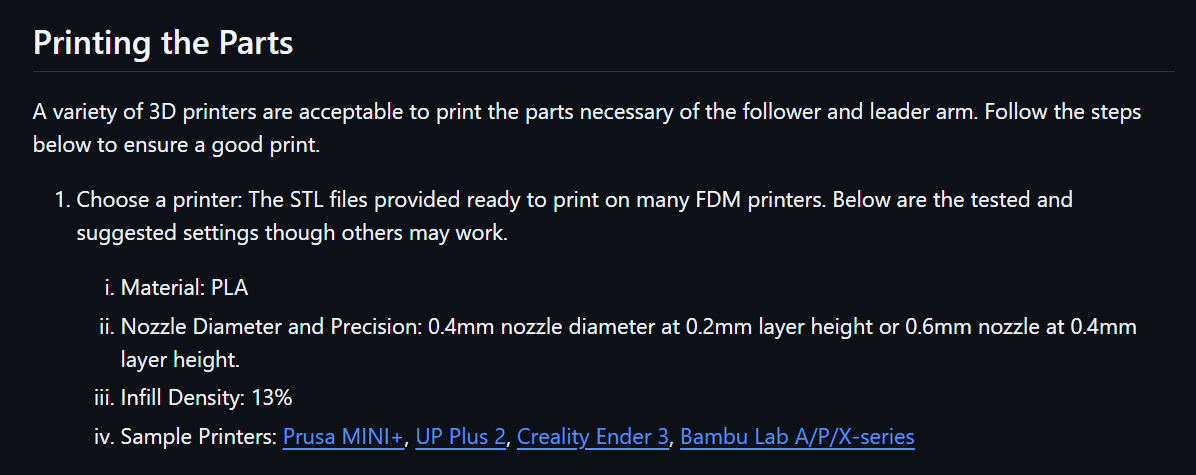
SO-ARM100 机械臂有 6 个自由度,支持 3D 打印,性价比超高,是 Lerobot 开源机器人解决方案的一部分
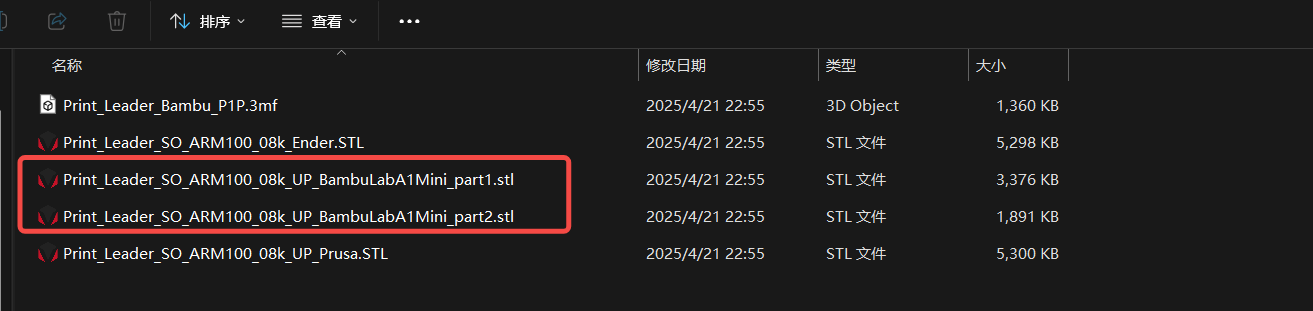
git clone后3d打印文件这里我用这两个stl文件,另外几个太大,我这个型号一盘放不下
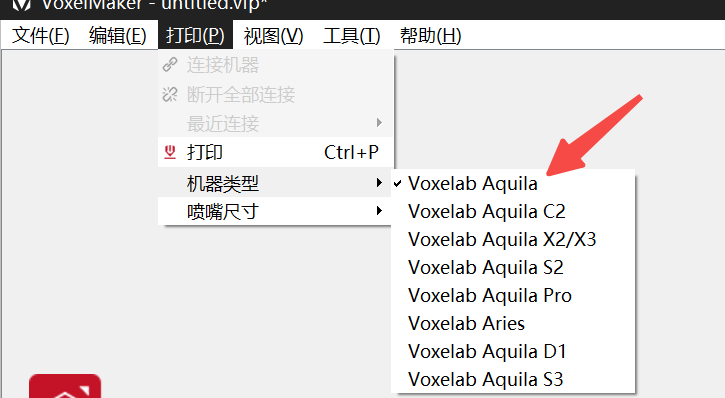
以前买的天鹰座,现在不知道出多少代了,好像最近比较火的是拓竹,以后再看要不要更新
Part1摆放好后还可以
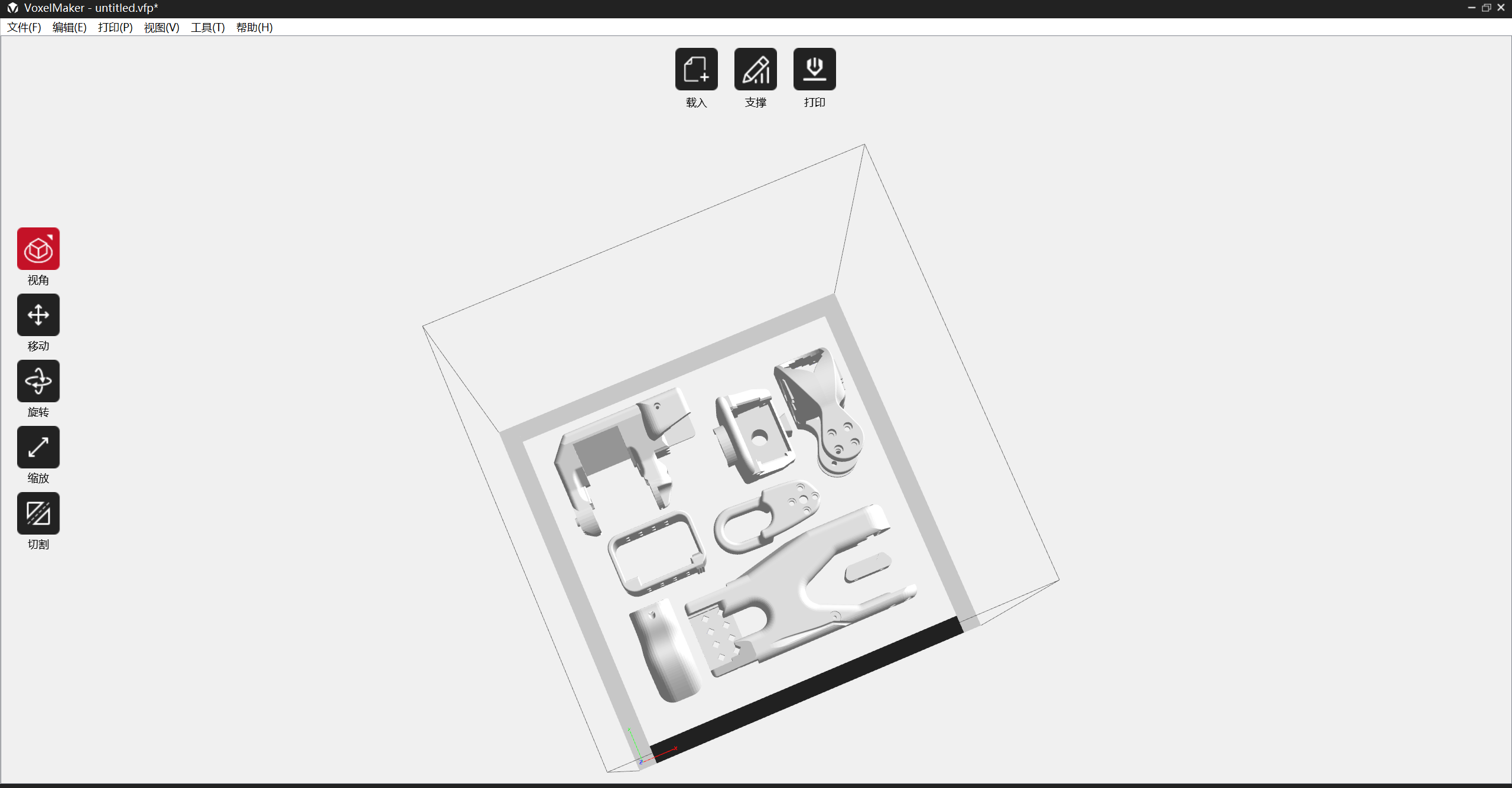
Part2也刚刚好
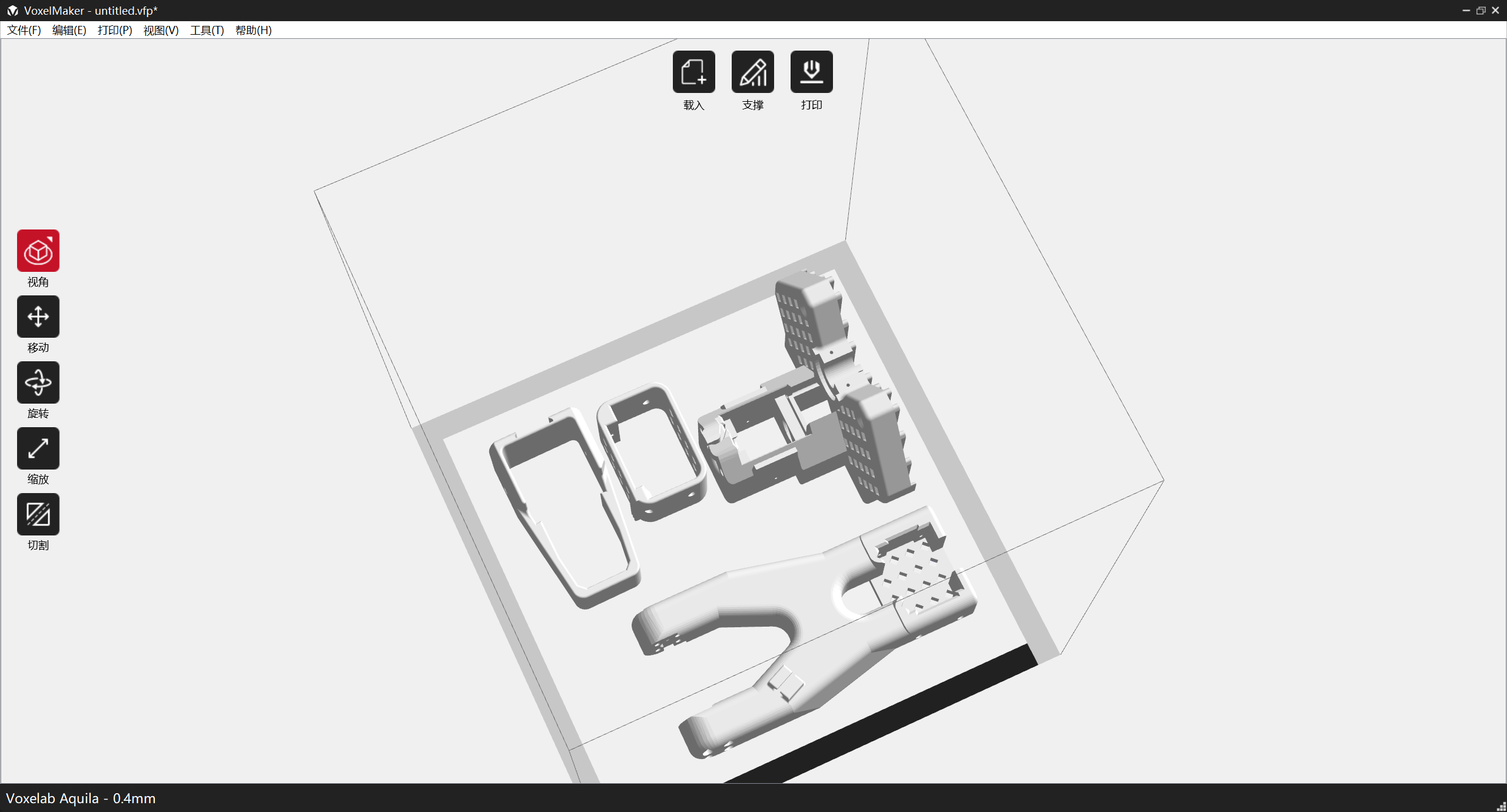
然后就开始打印了

















 3940
3940

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









