






Z. -Z. Liu, Y. Qin, W. Song, J. Zhang and K. Li, "Multiobjective-Based Constraint-Handling Technique for Evolutionary Constrained Multiobjective Optimization: A New Perspective," in IEEE Transactions on Evolutionary Computation, vol. 27, no. 5, pp. 1370-1384, Oct. 2023, doi: 10.1109/TEVC.2022.3194729.
摘要:基于多目标的约束处理技术在进化约束单目标优化中应用广泛。然而,这些技术大多在处理约束多目标优化问题( CMOPs )时遇到困难。也就是说,它们很难优化过多的目标函数,不能有效地保持种群的多样性,或者在建立适当的附加目标函数方面受到挑战。作为对这些局限性的弥补,我们提出了一种名为NRC的处理CMOPs的新技术。NRC的新颖之处在于它的3个排序步骤:非支配排序、反向非支配排序和带约束的拥挤距离排序,依次执行,分别为转化的无约束多目标优化问题的Pareto前沿( PF )、边界前沿和约束PF提供驱动力。通过这3种不同的力的组合,NRC可以方便地从不同的搜索方向逼近期望的PF。实验验证了NRC的有效性。此外,我们还将NRC融入到双存档机制中,提出了一种新的约束多目标进化算法,称为NRC2。
一、相关工作
(一)基于多目标的约束处理技术分类
1、the standard multiobjective method
一个目标函数,多个约束函数,形如(f (x), CV1(x), . . . , CVl(x))T
2、 the standard bi-objective method
一个目标函数,1个约束函数,形如(f (x), CV (x))T
3、the generalized multiobjective method
加入额外的目标函数将受约束单目标优化问题转化为无约束多目标优化问题
(二)CMOEAs分类
1、可行性驱动的算法
优先选择可行解,如NSGA-II-CDP
2、非可行性辅助的算法
目前的主流,比如一种two-archive evolutionary algorithm叫做C-TAEA,维护了两个归档,一个以收敛性为目标,一个以多样性为目标
二、NRC的提出
1、理论基础
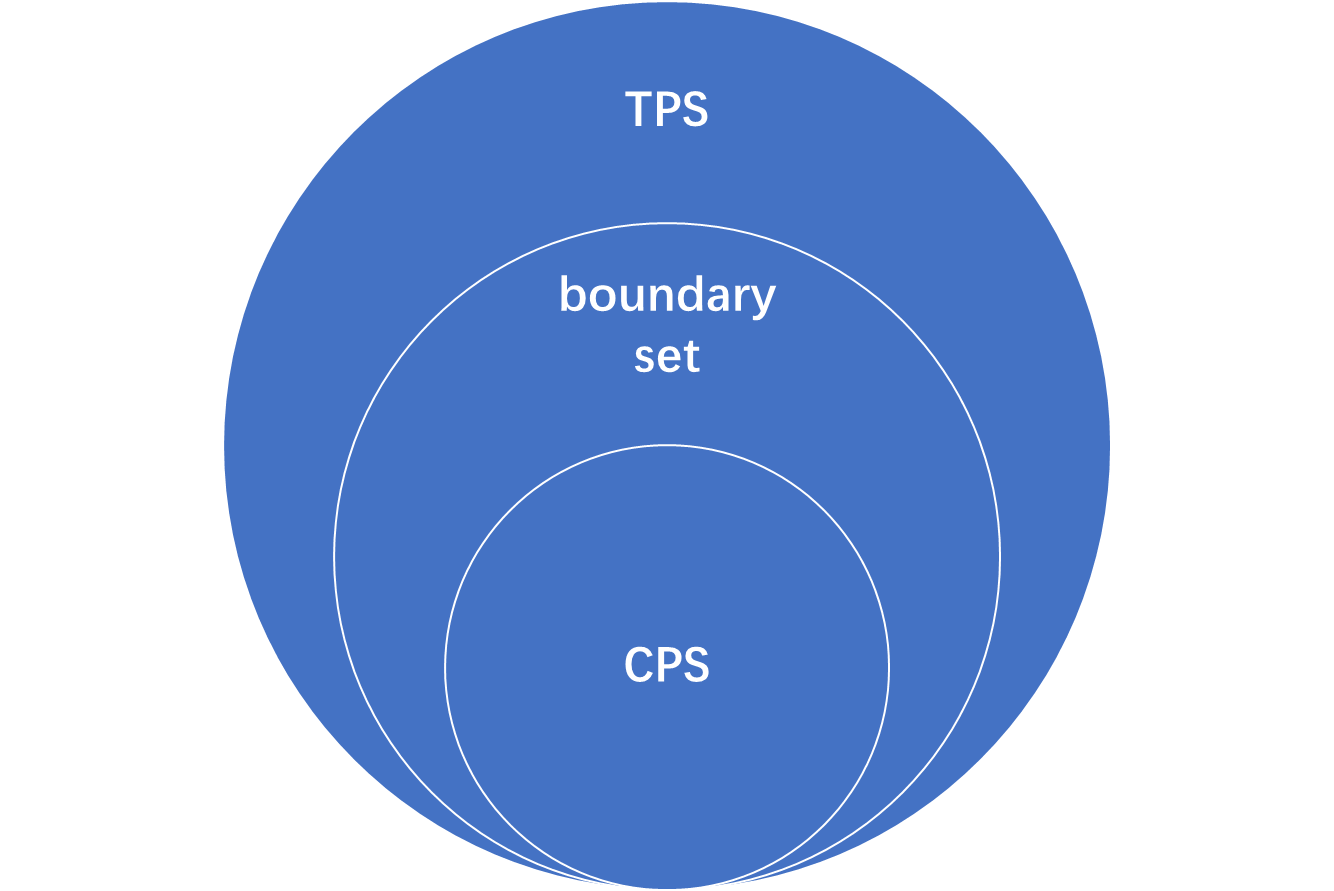
(1)CPS是TPS的可行子集
(2)在原始的目标空间中(转化前),CPS中的解无法支配TPS中的解
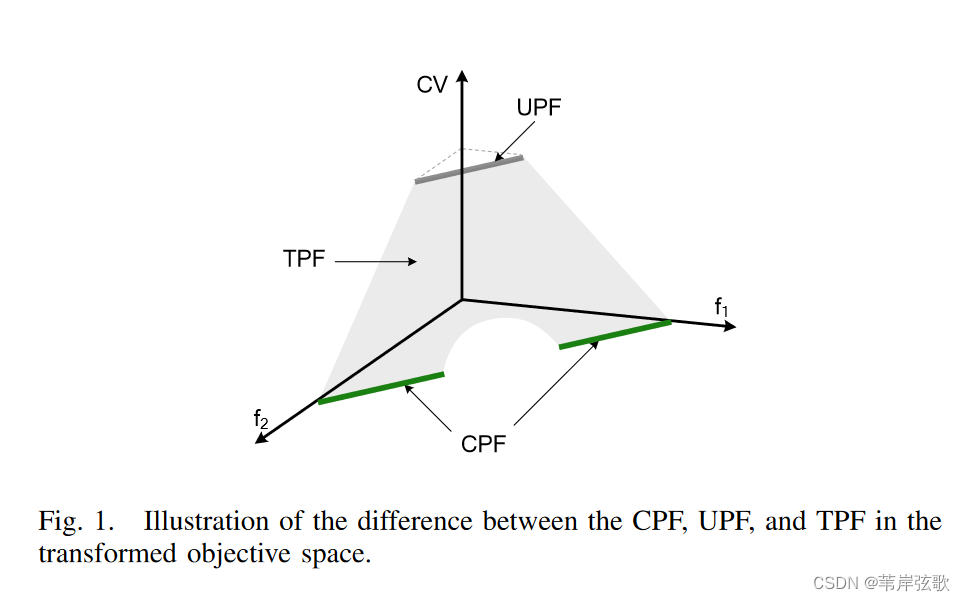
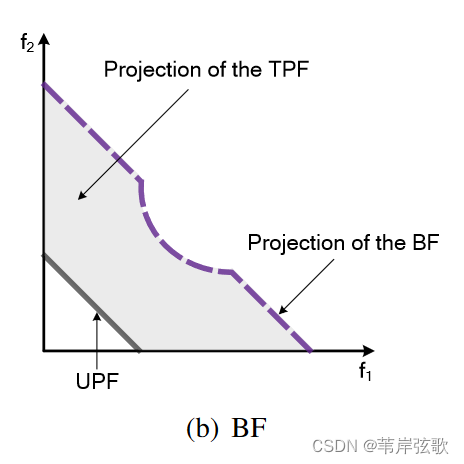
(3)boundary solution、boundary set和boundary front
TPS中在转化前的目标空间中无法支配其他解的解称为boundary solution,boundary solution的集合称为boundary set,boundary set在转化后的目标空间构成boundary front(BF)
(4)CPS、boundary set和 TPS的关系
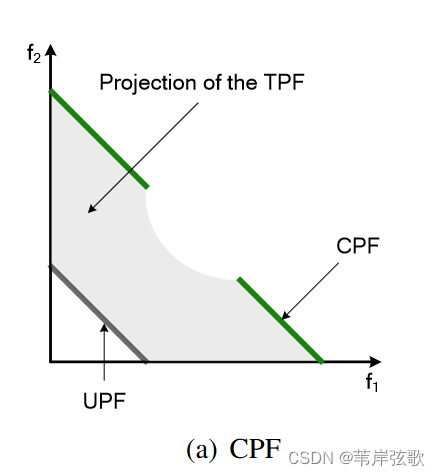
2、NRC的思路
(1)种群向着TPF进化——使用非支配排序
(2)种群向着BF进化——使用反向非支配排序
(3)根据可行性选择第二步得到的解,使得解向CPF进化——使用受约束的拥挤距离排序
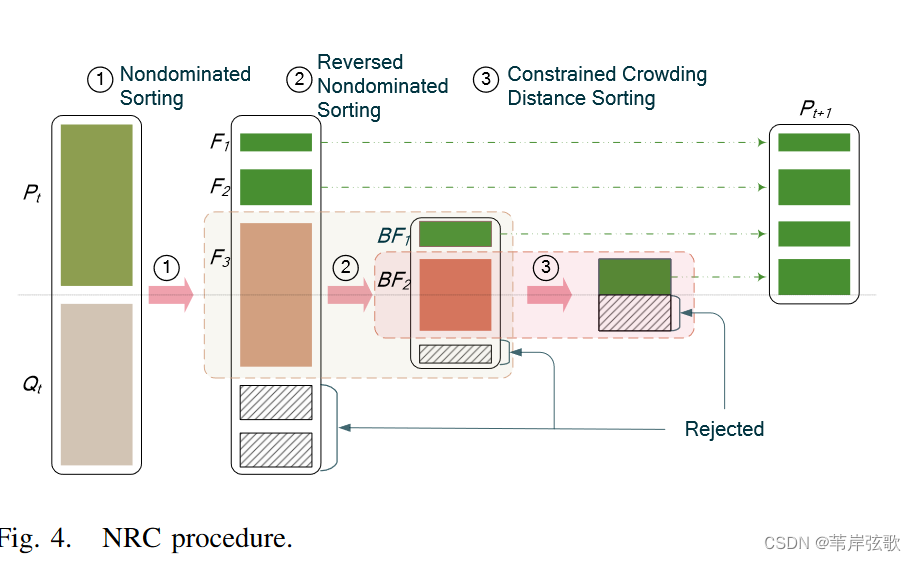
3、非支配排序
在转化后的空间内,优先选择支配能力强的
4、反向非支配排序
在转化前的空间内,优先选择支配能力弱的,所以是对目标函数加负号后进行非支配排序

5、受约束的拥挤距离排序
在考虑均匀分布的基础上,加上了对约束的考虑

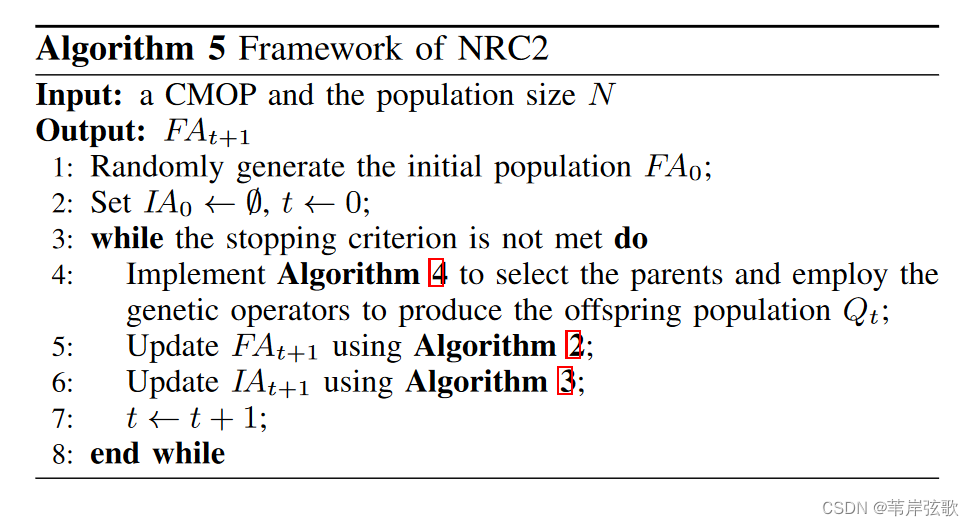
三、NRC2的提出
可行性驱动的CMOEA,优点是可以更快的使种群向可行域进化;非可行性辅助的CMOEA,优点是可以保持搜索的多样性,NRC2就是一种将二者结合起来的策略,采用了双归档的结构,分别为可行性驱动的归档(FA)和不可行性辅助的归档(IA)
1、整体框架
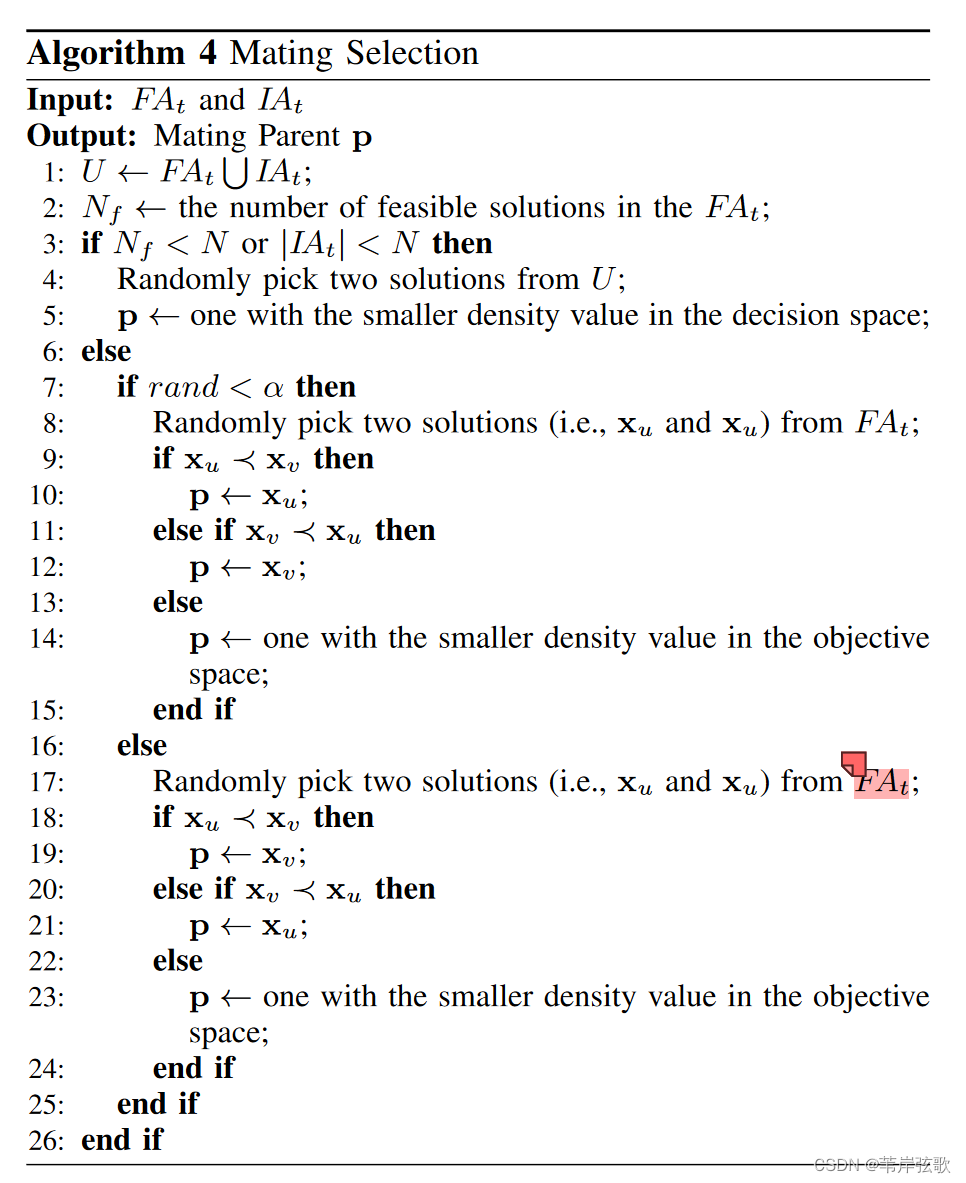
2、选择过程
非支配排序使用的是以下论文的方法
X. Zhang, Y. Tian, R. Cheng and Y. Jin, "An efficient approach to nondominated sorting for evolutionary multiobjective optimization", IEEE Trans. Evol. Comput., vol. 19, no. 2, pp. 201-213, Apr. 2015.
计算density的方法来自以下文章
E. Zitzler, M. Laumanns, and L. Thiele, “SPEA2: Improving the strength pareto evolutionary algorithm for multiobjective optimization,” Proceedings of Evolutionary Methods for Design, Optimization and Control with Applications to Industrial Problems, EUROGEN’2001, pp. 95–100, 2001.

分母是第K近的距离,k根据N调整
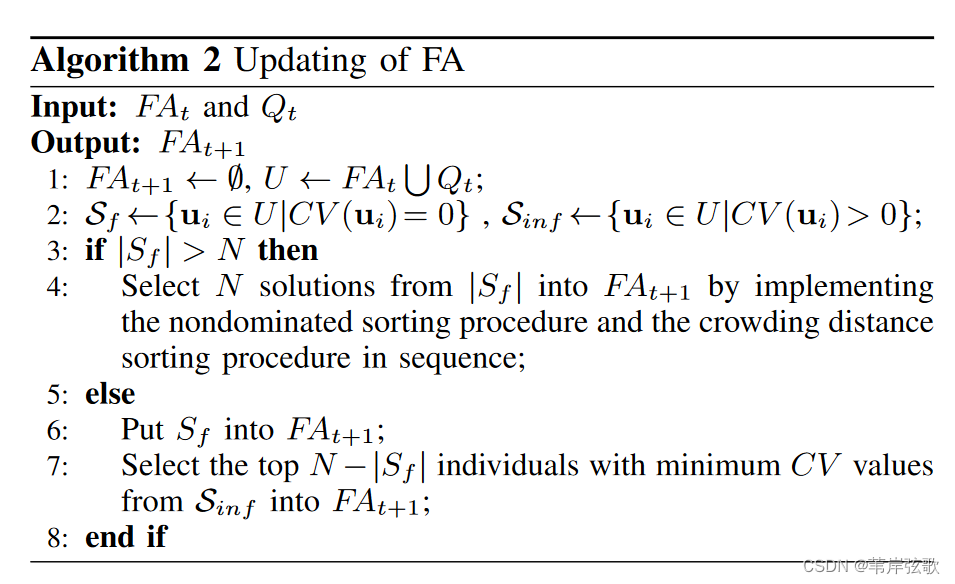
3、更新FA
拥挤距离排序的方法来自以下文章
Z.-Z. Liu, B.-C. Wang and K. Tang, "Handling constrained multiobjective optimization problems via bidirectional coevolution", IEEE Trans. Cybern., Apr. 2021.
4、更新IA
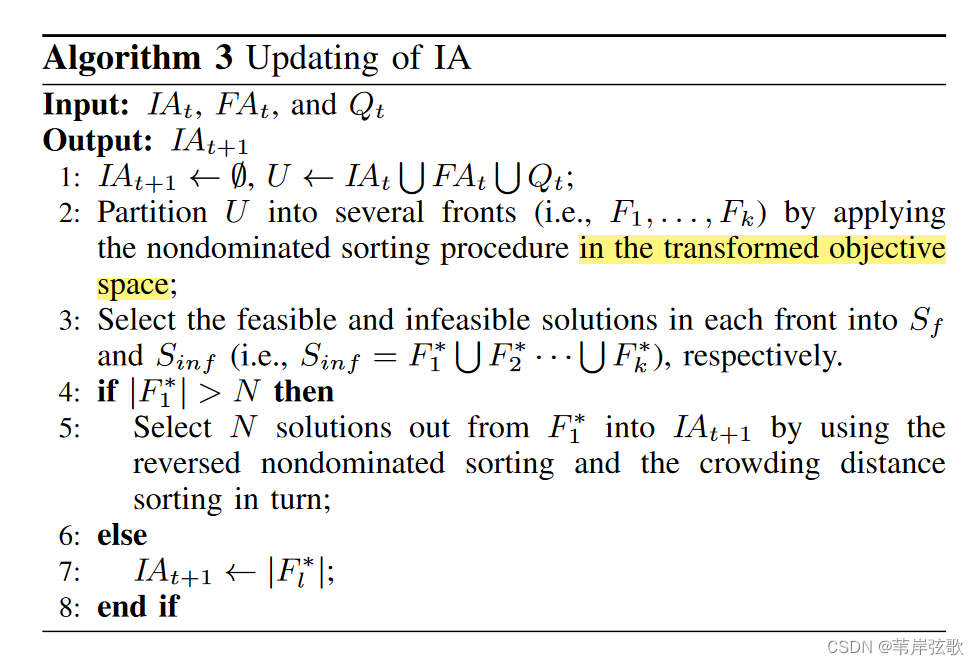
5、交叉变异
模拟二进制交叉和多项式变异
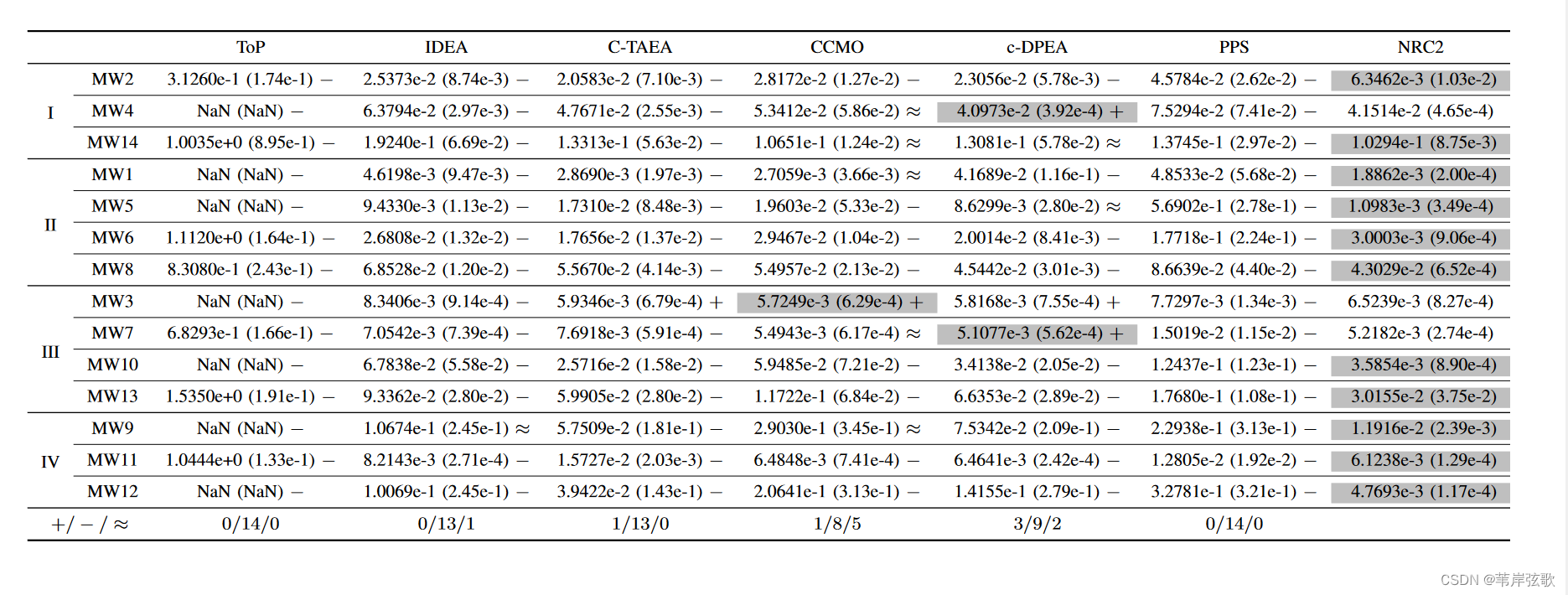
实验
比较了IGD和HV指标,在CTP测试套件和MW测试套件上的表现优于时下最流行的算法,ToP, IDEA, C-TAEA, CCMO, c-DPEA, and PPS















 3248
3248











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









