







 本文详细介绍了使用拉格朗日法推导四自由度机械臂的运动方程,从系统方程符号开始,经过几何参数、动能、势能的定义,到拉格朗日方程的构建,并通过Simulink建立模型进行仿真验证。推导过程中考虑了关节驱动力矩、非保守力和非保守扭矩的影响。
本文详细介绍了使用拉格朗日法推导四自由度机械臂的运动方程,从系统方程符号开始,经过几何参数、动能、势能的定义,到拉格朗日方程的构建,并通过Simulink建立模型进行仿真验证。推导过程中考虑了关节驱动力矩、非保守力和非保守扭矩的影响。
0、前言
试着推导并实现四自由机械臂的运动方程,在此处使用拉格朗日法进行。系统机构图如下:
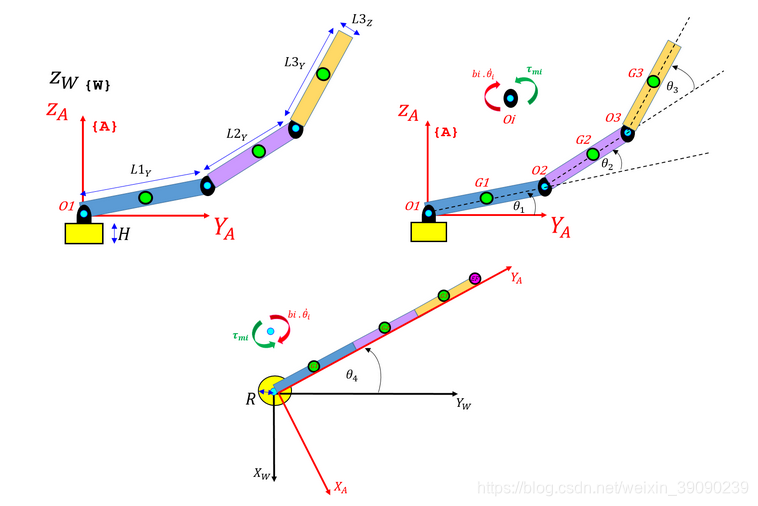
注:第一个关节是圆柱转盘,其他关节绕枢轴点转动。其中Tm为关节驱动力矩,由电机提供;b*theta_d为粘性阻尼扭矩。
1、系统方程符号推导
(1)拉格朗日运动方程一般形式如下:

其中,n为自由度数;{q1,q2,.....qn}为广义坐标角度;{Q1,Q2,......Qn}为广义坐标角度对应的广义力。拉格朗日算子为L=T-V,为n自由度系统的动能和势能之差。
(2)非保守力和非保守扭矩形式---牛顿欧拉法?
广义力也可以用作用在多体系统上的

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 5011
5011

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











