







在rplidar连接与ROS主机、 即树莓派、工控机等;
ROS从机观测室内地图, 即PC、或者虚拟机。
前提:已经配置好多机通讯,安装好了ubuntu系统以及ROS系统,并且USB口可是别设备。
1.基本性能
RPLIDAR A2 的典型 旋转频率为 10hz (600rpm),在典型旋转频率下可以实现 0.45°的角度分辨率,RPLIDAR采用了激光三角测距技术, 每秒8000次 的高速激光测距采样能力,可以实现在二维平面的12米半径范围内进行 360度 全方位的激光测距扫描,并产生所在空间的平面点云地图信息。
2、工作原理
每次测距过程中,RPLIDAR将发射经过调制的红外激光信号,该激光信号在照射到目标物体后产生反光将被RPLIDAR的视觉采集系统接收,然后经过嵌入在RPLIDAR内部的DSP处理器实时解算,被照射到目标物体与RPLIDAR的距离值以及当前的夹角信息将从通讯接口中输出。在电机机构取得下,RPLIDAR的测距核心将顺时针旋转,从而实现对周围环境的360度全方位扫描测距检测。
2.1三角测距原理
主流的激光雷达主要是基于两种原理的,一种是 三角测距法 ,一种是飞行时间(TOF)法。
(1)单点三角测距
典型的三角测距原理结构如下图:
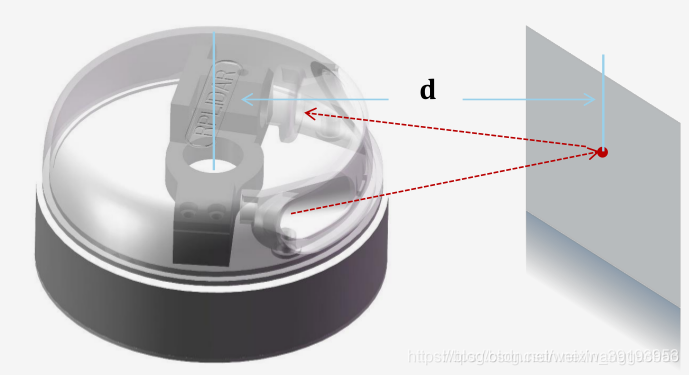

激光器Laser以一定的角度beta射出一束激光,沿激光方向距离为d的物体反射激光。接收激光的一般是个长条的CMOS(可以看成是一个长条形的摄像头),被物体反射的激光经过“小孔成像” 被Imager(即CMOS)拍摄到。
焦距是f,物体离平面的垂直距离是q,激光器和焦点间的距离是s,过焦点平行于激光方向的虚线,它跟Imager的交点位置一般是从图中很容易看出来,q,d,beta组成的三角形跟X,f组成的三角形是相似三角形,于是有:

因为f,s,beta都是预先可以已知的量,唯一需要测量的就是X,因此,测出X即可计算出d,即得到物体离激光器的距离。从图中可以看到,若d的距离变短了,则X就会变大,d变大了,X就变小了,从Imager测出X只要计算出得到的光斑的中心即可获得距离X。
(2)从单点变成激光器
将激光器和成像器固定在一起,做成一个固定的装置,然后旋转,即可获得周围360°的扫描结果。
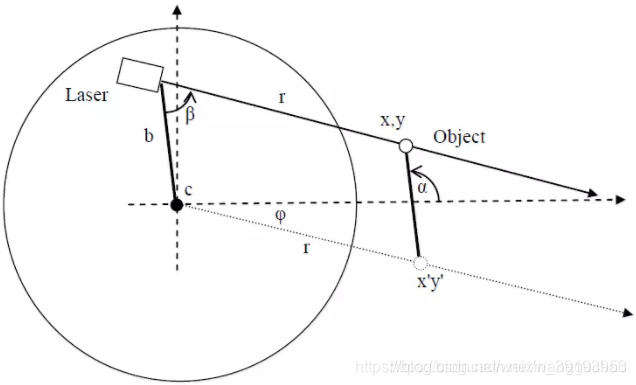
2.2扫描数据坐标系定义

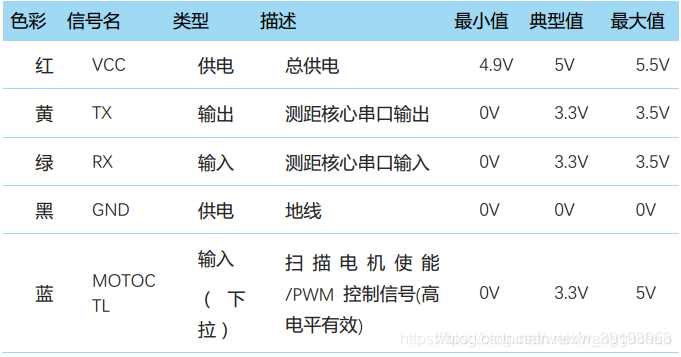
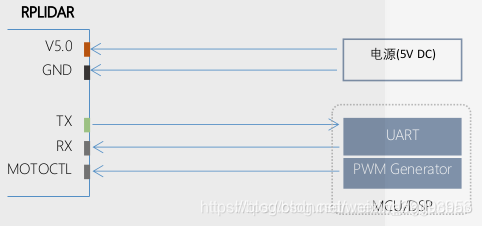
2.3数据通讯接口
RPLIDAR A2 通讯接口采用 3.3V 电平的串口(UART)。
3、设备连接
(1)将RPLIDAR A2 模组的连接线与USB适配器进行连接
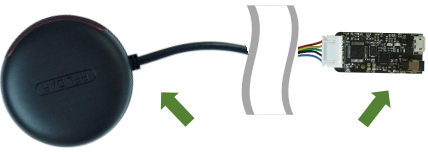
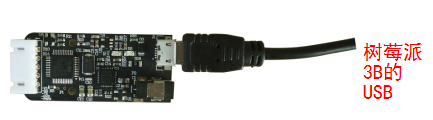
(2)将USB转接器通过 Micro-USB线缆与树莓派3B连接。
4、激光器数据的显示
rplidar ros package、支持设备rplidar A2/A1.
rplidar包安装(主机从机)
终端一次运行:
$ cd ~/ros_ws/src
$ git clone https:// 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 5436
5436











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









