






开源ROS机器人操作系统是机器人开发的利器,集成了大量先进的算法,而且还开源,国内也有很多人在研究,也有些原型,但网上文章多是翻译官方的英文教程,在这里我们一步一步的制作一个ROS机器人,探讨机器人制作的步骤,而且我们尽量用开源的硬件Arduino,树莓派,配件都可以在网上买到,或者用自己的一些旧的器件。

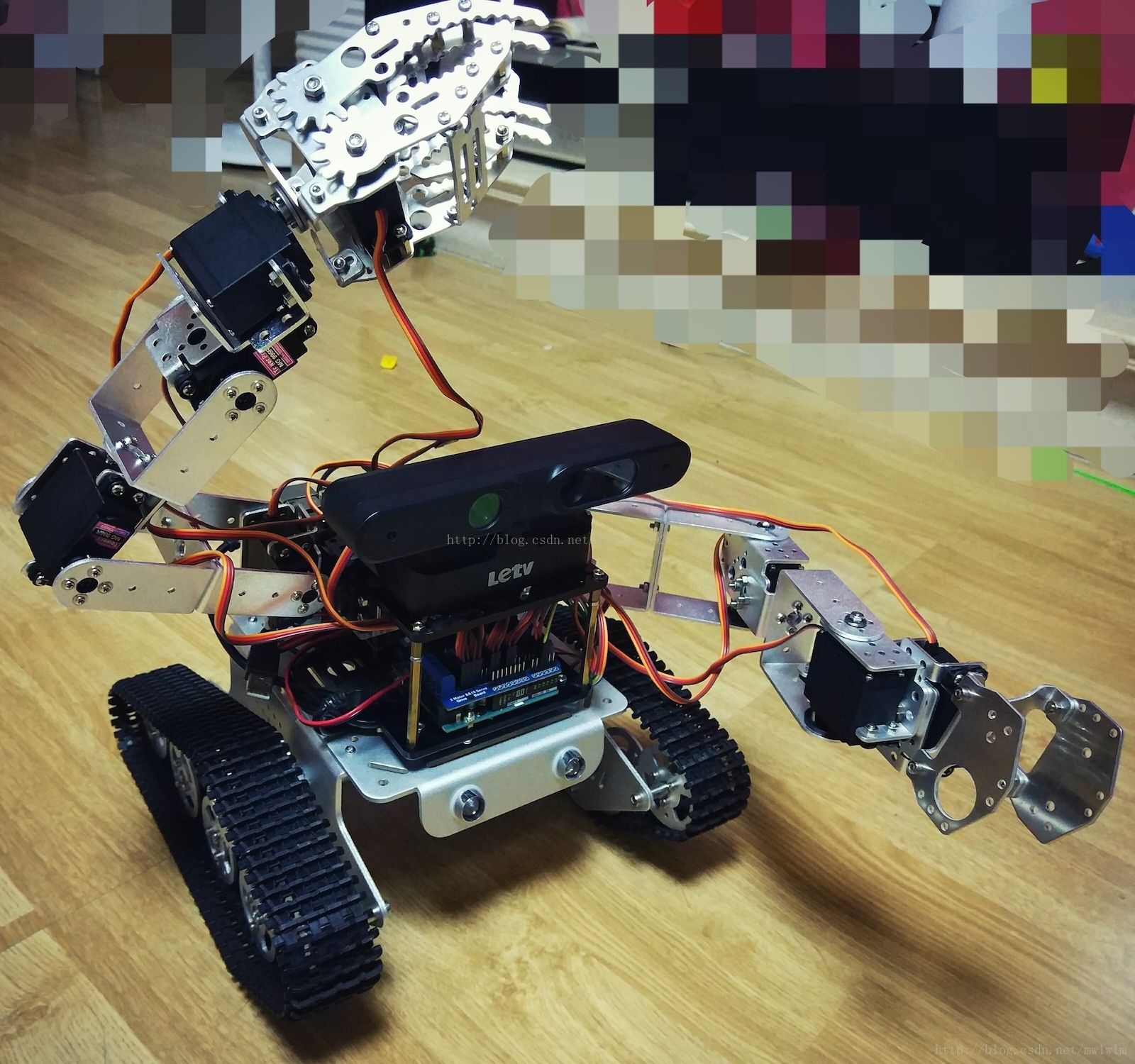
这里用了两种不同的底盘,除了底盘,其他都一样,之所以会有两种底盘,是在做第一张图所示的机器人的时候,发现底盘太小,稳定性比较差,上面加的组件越多,越是容易摔倒,索性换一个大的底盘,由于底盘的不同,需要修改Base Controller部分的参数,后面会详细讲到。
BOM清单
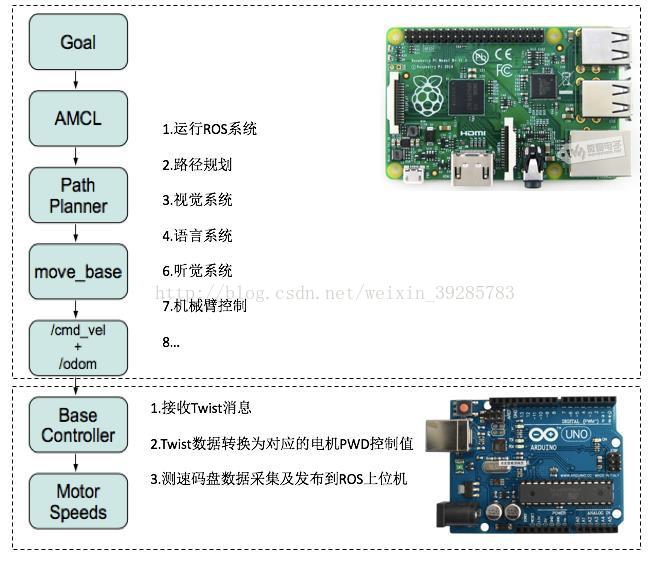
ROS控制模型,对应的主板















 538
538

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









