









步进电机是一种把电脉冲信号转换为机械角位移的控制电机,常作为数字控制系统中的执行元件。
一、步进电机分类:
反应式(VR-Variable reluctance):
转子为软磁材料,无绕组;定、转子开小齿;步距角小;
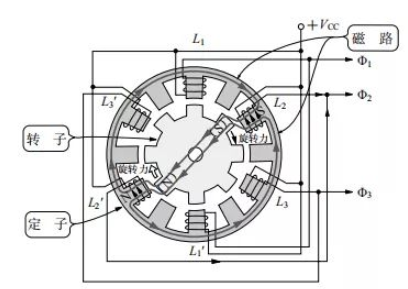
转子是由高导磁材料加工成的齿轮状转子,定子是加工成内齿轮状的铁芯上绕有线圈。上图中的转子节距为45°,定子节距为30°。转子处于当前图示位置时,驱动信号Ф 2激发电流流向L2,定子为N极。另外,L2 对面的L2′中流过电流,成为S极。线圈L2、L2′产生的磁动势,形成以粗线表示的磁路。转子是用易通过磁通量、易磁化的高磁导率材料制成的,所以形成了最短磁路。其结果是,线圈L2、L2′对应的转子部分产生图示的磁极,进而产生箭头方向的 力(转矩),作用于转子。VR式不使用永磁体,理论上步进角可以小到齿轮的加工极限。另外,因为不使 用永磁体,所以适合制成大型电机。但是,正是因为VR式不使用永磁铁,所以当所有驱动信号关断时,转子的保持 转矩会消失。因此,对于电机空转有困难的应用,静止时也要向驱动线圈持续提供保 持电流。
永磁式(PM-Permanent Magnet):
转子为永磁材料,转子的极数=每相定子的极数,不开小齿,步距角较大,力矩较大;
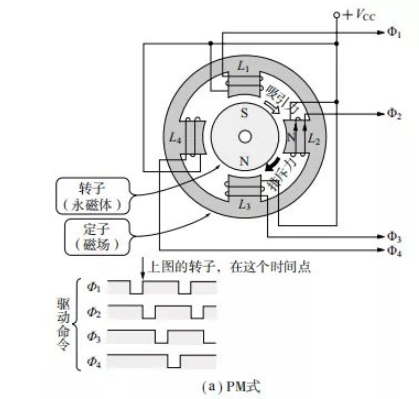
由永磁体转子和绕有励磁线圈的定子(磁场)构成。
定子由以90°间隔配置的4个线圈L1~L4构成。在图示状态下,驱动信号Ф 2激发电流 流过L2,定子铁芯为N极,转子的N极、S极分别受到排斥力和吸引力,转子按顺时针 方向旋转(步进移动)。如果线圈端子Ф1~Ф4通过驱动信号Ф 1~Ф 4按顺序驱动,转子就会连续旋转。PM式转子使用的是永磁体,所以即使驱动输入完全关断,也具有保持最后状态 的力(转矩)。因此,静止时不需要流过保持电流。为了减小PM式电机的步进角,需要将转子做成多极结构,电机结构会变复杂。
感应式(混合式HB-Hybrid):
转子为永磁体,分为两段,开小齿,转矩大,动态性能好,步距角小,但结构复杂,成本高;HB式拥有PM和VR式两种结构的特点,同时具备:
1)PM式的静止保持力矩;
2)VR式的微小步距和大转矩;
永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5°或15°;
反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和振动较大;
混合式步进电机有两相、四相、五相,其中两相步进角一般为1.8°而五相步进角一般为0.72°。混合式的应用最广。
二、步进电机型号:
主要有35,39,42,57,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 603
603











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









