






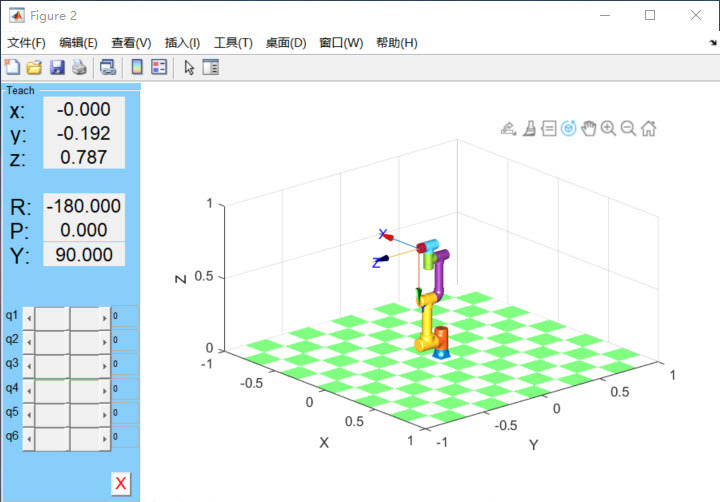
机器人工具箱的优点就是可视化效果好,能够通过teach函数实现示教,但是在使用过程中,由于连杆都是以棍棒的形式显示,导致显示效果不逼真。

不能明显看出轨迹规划过程中,连杆之间是否回发生干涉,peter博士在工具箱提供了plot3d函数可以通过model3d函数加载stl文件,通过DH参数进行组合,但是只提供了puma560等个别机器人工stl文件。

借鉴的是ARTE工具箱,该工具箱是专注于机械臂仿真,包括串联和并联机器人。
ARTE (A Robotic To
机器人工具箱的优点就是可视化效果好,能够通过teach函数实现示教,但是在使用过程中,由于连杆都是以棍棒的形式显示,导致显示效果不逼真。
不能明显看出轨迹规划过程中,连杆之间是否回发生干涉,peter博士在工具箱提供了plot3d函数可以通过model3d函数加载stl文件,通过DH参数进行组合,但是只提供了puma560等个别机器人工stl文件。
借鉴的是ARTE工具箱,该工具箱是专注于机械臂仿真,包括串联和并联机器人。
ARTE (A Robotic To 482
482











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















