







对于控制器的开发,基于模型的开发方式(Model based development)越来越成为主流。在这个开发模式中,硬件在环仿真测试(Hardware-in-loop,HIL)是一种典型的测试方法。

关于为什么要进行硬件在环仿真(HIL),前文已经做了详细介绍。
https://zhuanlan.zhihu.com/p/208494900zhuanlan.zhihu.com简而言之,硬件在环仿真,是将真的控制器连接假的被控对象(用实时仿真硬件来模拟),以一种高效、低成本的方式对控制器进行全面测试。
一般而言,做HIL测试的前提是控制器已经开发好,需要在理想或安全的环境下,测试控制器的功能是否正常。在该应用场景中,实时仿真硬件(或者说HIL台架)充当被控对象,以实时的方式运行被控对象模型,并模拟各类故障等。实时仿真硬件(或者说HIL台架)本质上来说,就是要尽可能逼真地模拟真实被控对象,以有效地欺骗控制器,让控制器以为它正在控制一个真实的被控对象。
HIL系统是通过实时主机运行被控对象的模型,并通过IO端口连接至被测的控制器。一般而言,HIL系统的IO通道方向与控制器的方向相反。

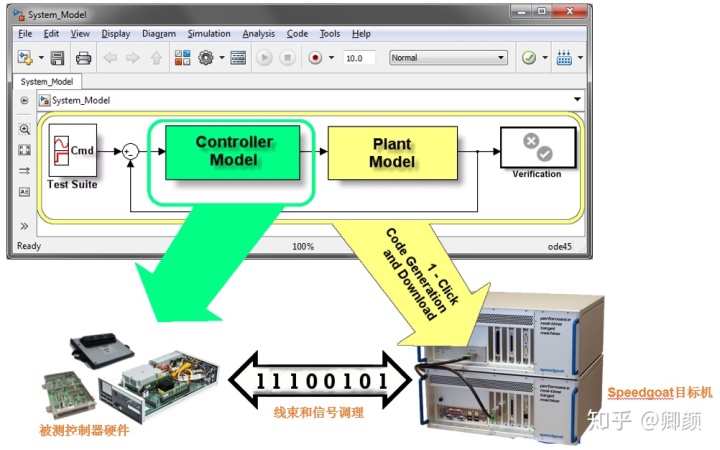
HIL台架供应商有不少,每家的形式略有不同,本文以基于Speedgoat的硬件在环仿真测试HIL台架为例,进行介绍。 @二流半仙儿 兄台已经对此做了详细介绍,可以参看此文。该文侧重于测试流程,而本文侧重HIL台架本身,做一个入门、基础的介绍。
https://zhuanlan.zhihu.com/p/150594028zhuanlan.zhihu.com 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 8671
8671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









