






按上一节使用方法进行速度控制也是可行,但存在一个问题,当设备正在运行,非停止状态,设备突然断电了,在上电可能伺服电机就直接转起来,除非伺服使能采用外部使能,在外部使能建立前复位一些通讯指令,比如转速先写0
那么可以使用虚拟IO方法控制伺服,虚拟IO在断电上电后,保存初始的0状态,那么伺服就不会突然断电再上电直接转起来,下面使用虚拟IO JOG点动模式控制伺服,具体查看伺服驱动器说明书
相关参数说明如下:

DI功能码:
主要就这些相关参数,下面是参数设置和串口指令:
伺服驱动器参数设置
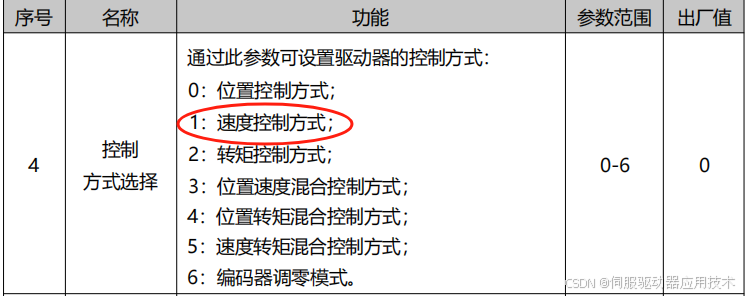
//控制方式速度控制:PA4=1
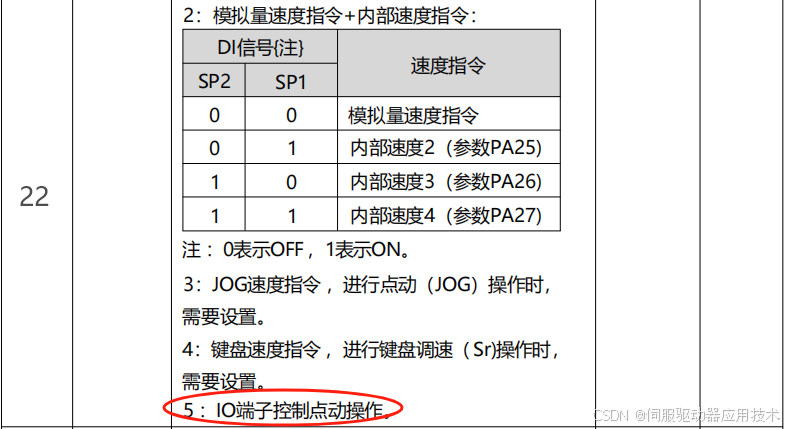
//速度方式JOG速度:PA22=5
//内部使能 :PA53=1
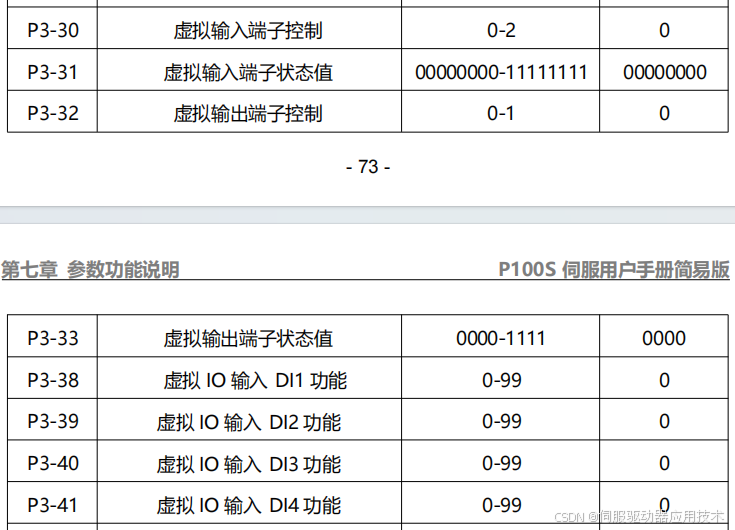
//设置虚拟IO控制 : P3-30=1
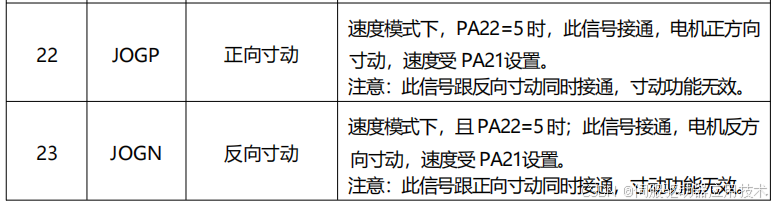
//设置虚拟DI1正向JOG : P3-38=22
//设置虚拟DI2反向JOG :P3-39=23
修改参数,驱动器重启
设置转速1000rpm
01 06 00 15 03 E8 98 B0
设置加速时间200ms
01 06 00 28 00 C8 08 54
设置减速时间200ms
01 06 00 29 00 C8 59 94
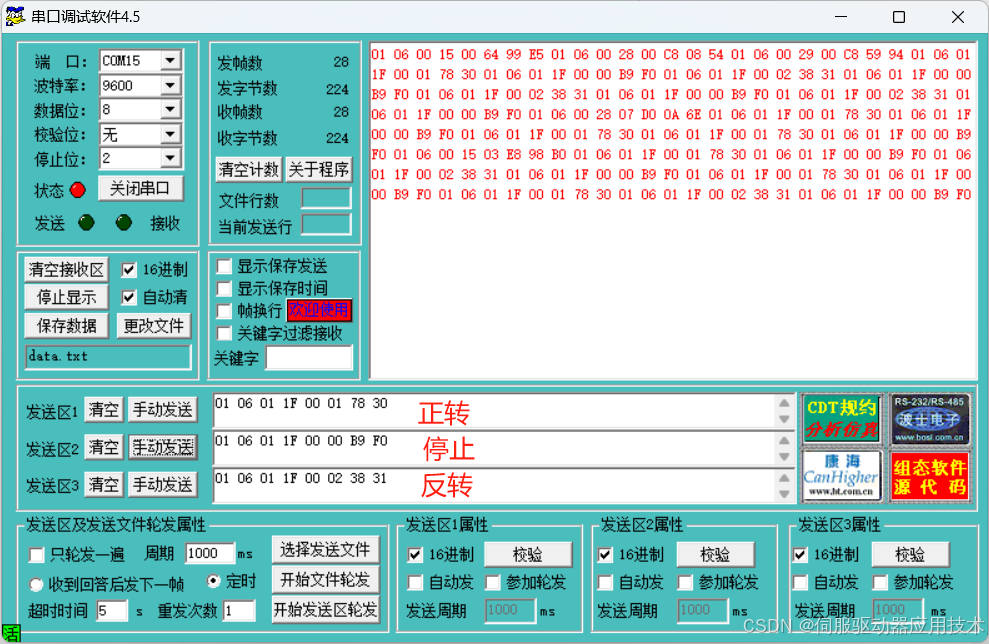
启动正转:
01 06 01 1F 00 01 78 30
停止运行:
01 06 01 1F 00 00 B9 F0
启动反转:
01 06 01 1F 00 02 38 31

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









