






1.ROS机器人实例介绍(PR2,Turtlebot,HRMRP,Kungfu Arm)
- 1).PR2:造就了ROS的机器人平台,完全基于ROS开发,功能丰富、强大
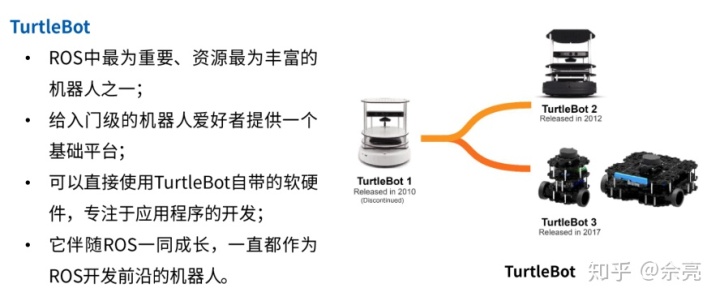
- 2).Turtlebot:ROS社区中最流行的高性价比机器人平台,前后工发布三代
- 3).Universal Robot:工业领域的协作机器人定义者
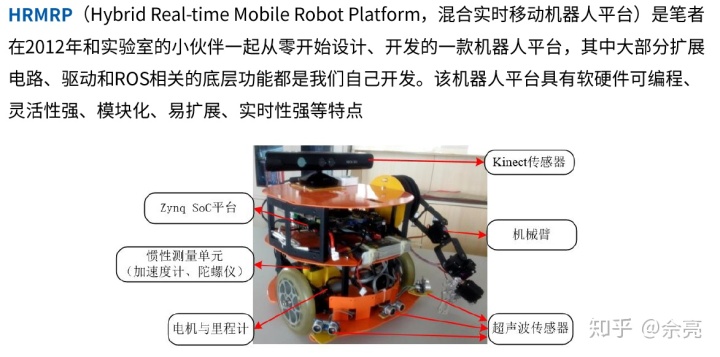
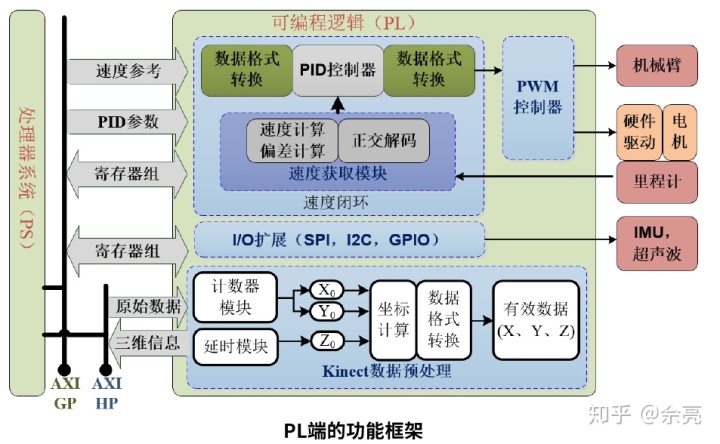
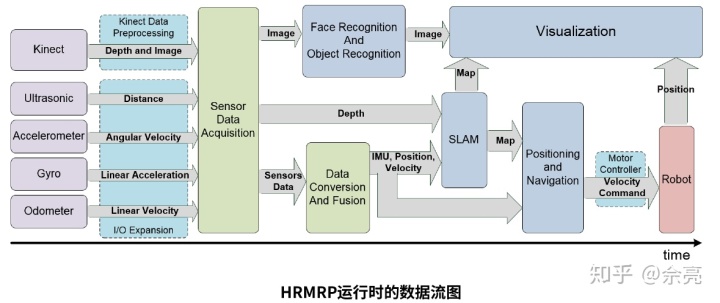
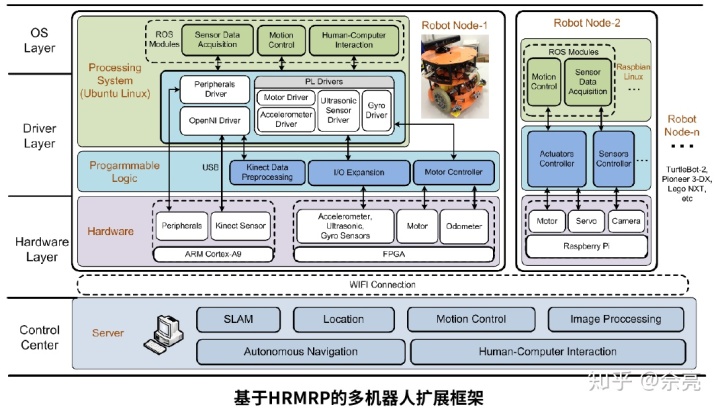
- 4).HRMRP:基于ARM+FPGA的异构实时移动机器人平台,可实现SLAM、导航、图像处理、多机器人协作等功能
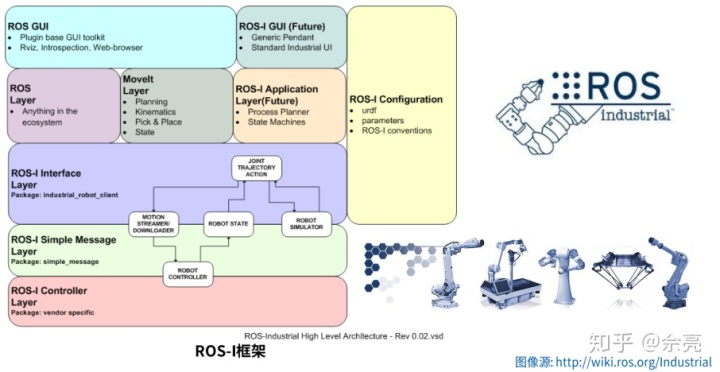
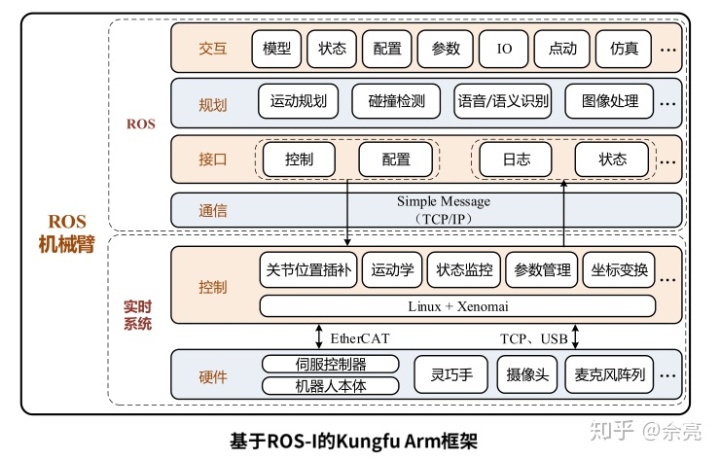
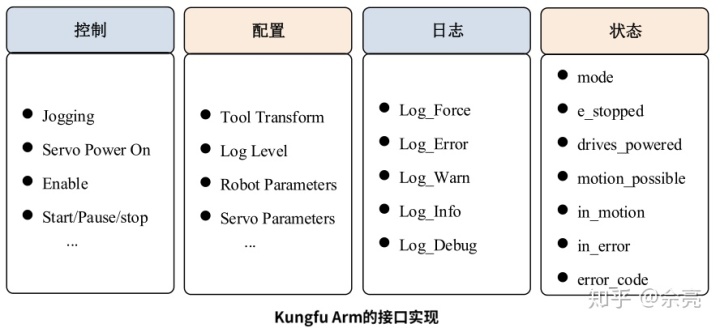
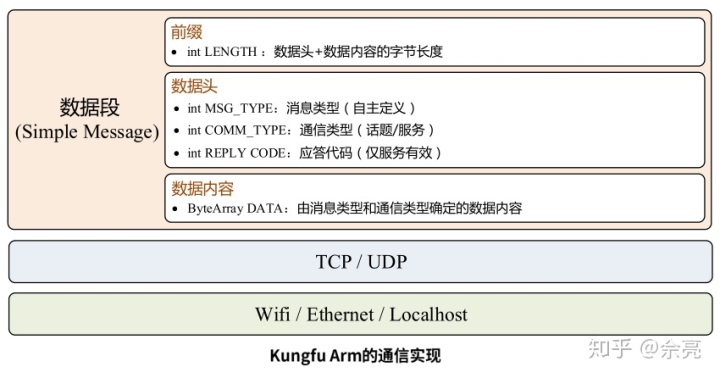
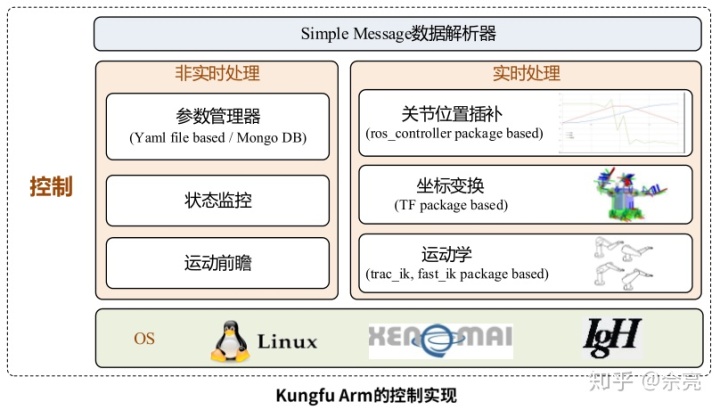
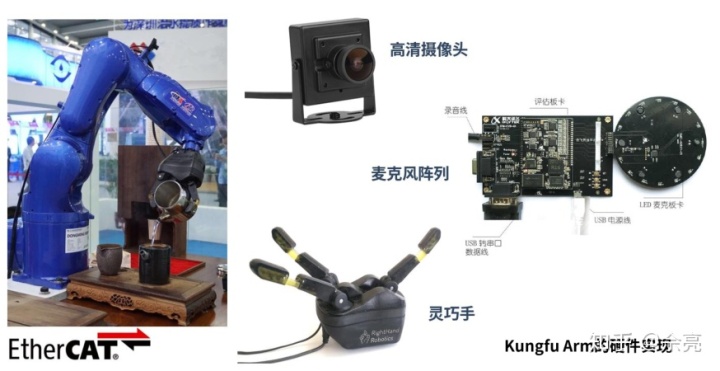
- 5).Kungfu Arm:基于ROS-I框架的机械臂控制系统,集成了机器视觉、语音、灵巧手等丰富的传感器和执行器

安装PR2功能包
sudo 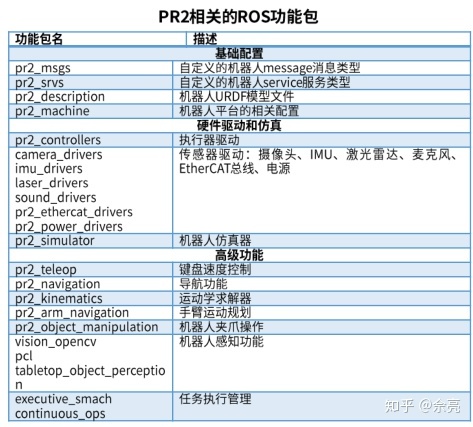
启动Gazeboz仿真
roslaunch pr2_gazebo pr2_empty_world.launch 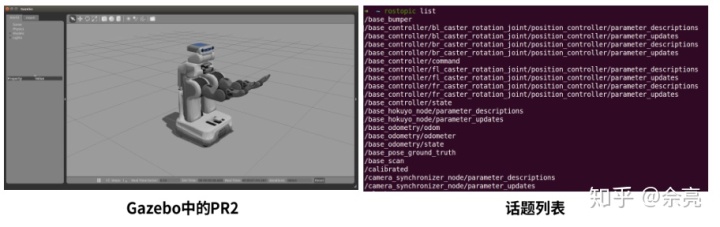
键盘控制
roslaunch pr2_teleop teleop_keyboard.launch 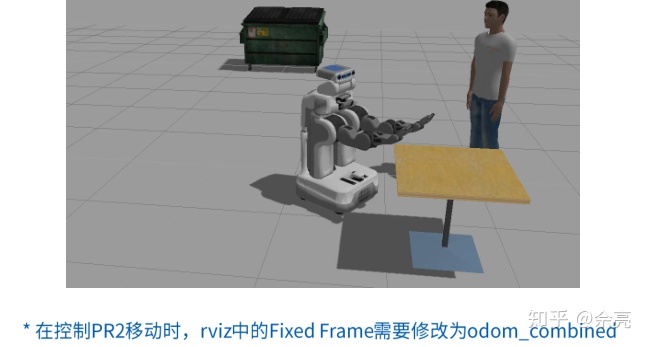
启动SLAM
roslaunch pr2_build_map.launch
roslaunch pr2_teleop teleop_keyboard.launch 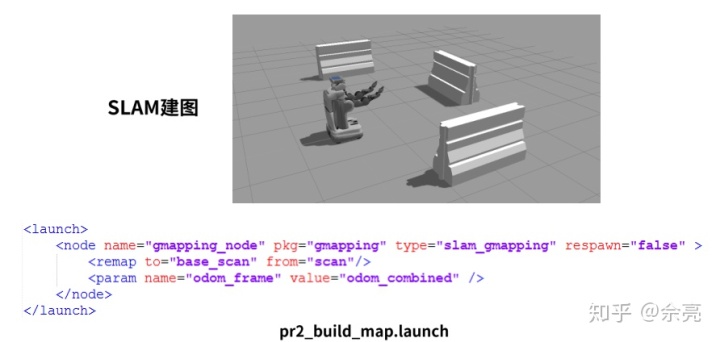
机械臂控制
roslaunch pr2_gazebo pr2_empty_world.launch
roslaunch pr2_teleop_general pr2_teleop_general_keyboard.launch 
机械臂MoveIt!控制
git clone https://github.com/davetcoleman/pr2_moveit_config.git
catkin_make
roslaunch pr2_moveit_config demo.launch 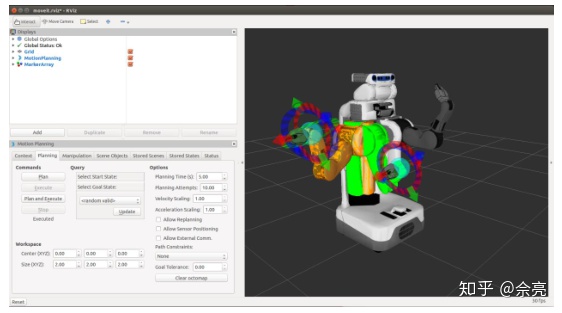
Gazebo+MoveIt!控制
roslaunch pr2_gazebo pr2_empty_world.launch
roslaunch pr2_moveit_config move_group.launch
roslaunch pr2_moveit_config move_rviz.launch 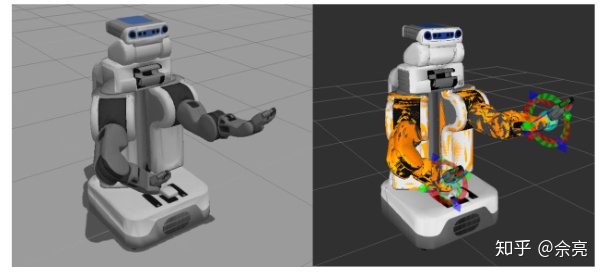
Turtlebot
安装Turtlebot功能包
sudo apt-get install ros-kinetic-turtlebot-*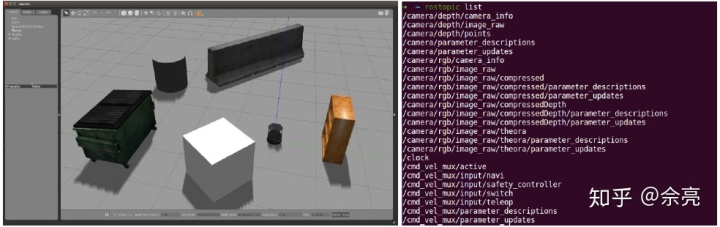
启动仿真环境
export TURTLEBOT_GAZEBO_WORLD_FILE="/opt/ros/kinetic/share/turtlebot_gazebo/worlds/playgroud.world"
roslaunch turtlebot_gazebo turtlebot_world.launch 键盘控制
roslaunch turtlebot_teleop keyboard_teleop.launch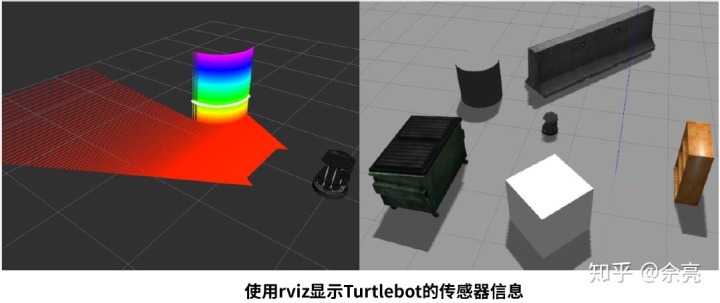
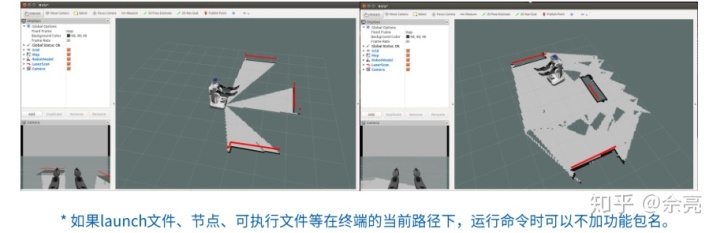
SLAM建图
export TURTLEBOT_GAZEBO_WORLD_FILE="/opt/ros/kinetic/share/turtlebot_gazebo/worlds/playgroud.world"
roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_gazebo gmapping_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
roslaunch turtlebot_teleop keyboard_teleop.launch 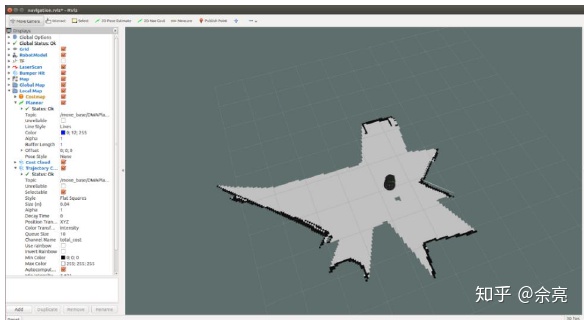
自主导航
roslaunch turtlebot_gazebo amcl_demo.launch
map_file:=/home/sl/turtlebot_test_map.yaml
roslaunch turtlebot_rviz_launchers view_navigation.launch 
安装Turtlebot3功能包
sudo apt-get install ros-kinetic-turtlebot3-* 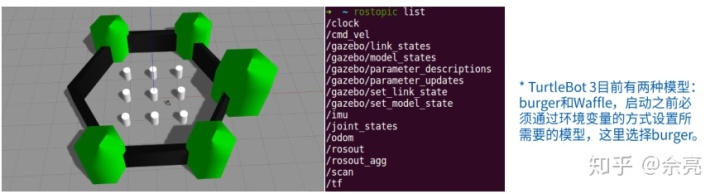
启动仿真环境
export TURTLRBOT3_MODEL=burger
roslaunch turtlebot3_gazebo_ros turtlebot3_world.launch SLAM建图
roslaunch turtlebot3_slam turtlebot3_slam.launch
rosrun turtlebot3_teleop turtlebot3_teleop_key 
Universal Robot 优傲机器人
- 一家引领协作机器人全新细分市场的先驱企业
- 关注机器人的用户可操作性和灵活度
- 安全度高、无需安全围栏、编程简单、灵活度高
- UR5,自重18公斤,负载高达5公斤、工作半径85cm
- UR3,自重11公斤,有效负载3公斤,所有腕关节均可360度旋转,末端关节可作无线旋转
- UR10的有效负载为10公斤,工作半径130cm
安装UR功能包
sudo apt-get install ros-kinetic-universal-robot 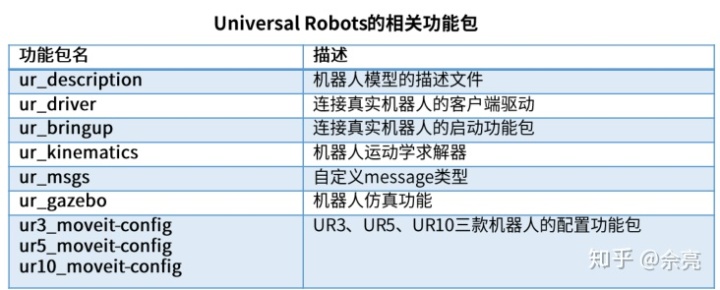
启动仿真环境
roslaunch ur_gazebo ur5.launch 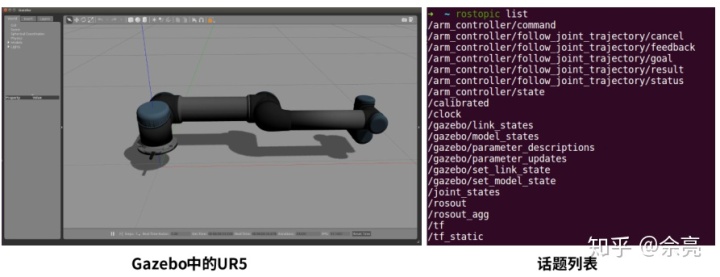

MoveIt!+gazebo
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
roslaunch ur5_moveit_config moveit_rviz.launch config:=true 
HRMRP


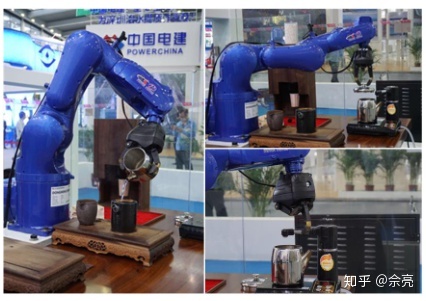
Kungfu Arm
- 基于ROS/ROS-I实现
- 同时控制六轴机械臂和仿生手,实现灵巧的夹持姿势
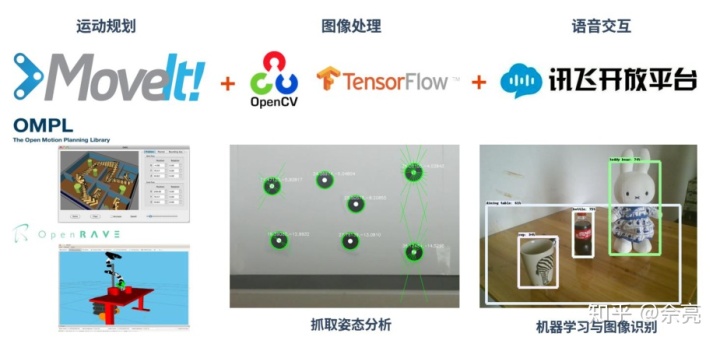
- 集成了多种运动规划库,可以实现运动学求解、路径规划、自主避障、速度和加速度的高阶平滑
- 集成高速视觉识算法,可以识别、定位工作范围内的杯子、茶球等物体,辅助机器人抓取
- 集成中文语音识别功能,可以实现语音控制、编程,丰富了机器人的输入途径
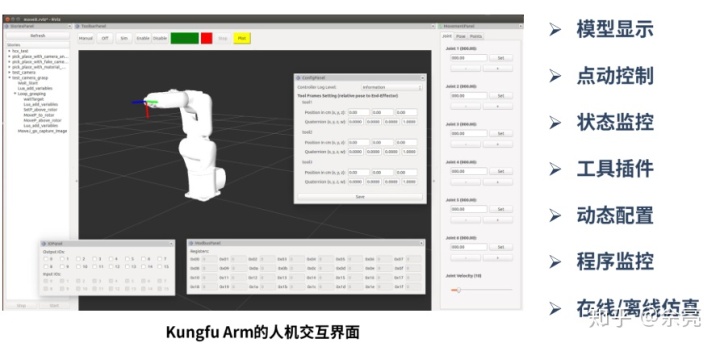
- 功能丰富的人机交互界面,不仅提供常用的机器人控制和监控,同时具备可热切换的3D离线仿真功能
- 底层伺服通讯采用高速EtherCAT工业总线,可以适配多种机器人本体
2.构建综合机器人平台
编译源码
sudo apt-get install ros-kinetic-velodyne-simulator
sudo apt-get install ros-kinetic-hector-gazebo-plugins
sudo apt-get install ros-kinetic-pcl-conversions ros-kinetic-pointcloud-to-laserscan
catkin_make mbot pro
模型显示
roslaunch mbot_description display_mbot_pro_xacro.laserscan 

仿真环境
roslaunch mbot_gazebo view_mbot_pro_with_laser_kinetic_gazebo.launch 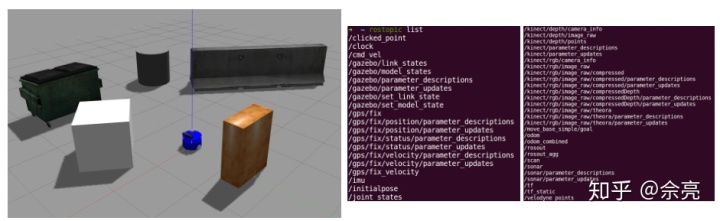
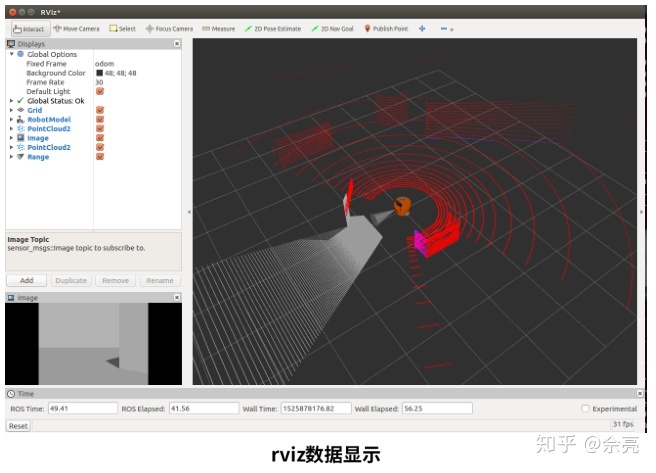
物体跟踪
roslaunch mbot_gazebo view_mbot_pro_with_laser_kinetic_gazebo.launch
roslaunch mbot_follower follower_bringup_nodelet.launch 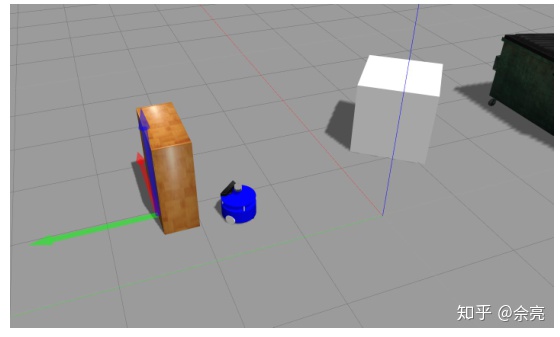
marm pro
模型显示
roslaunch marm_desription view_arm.launch 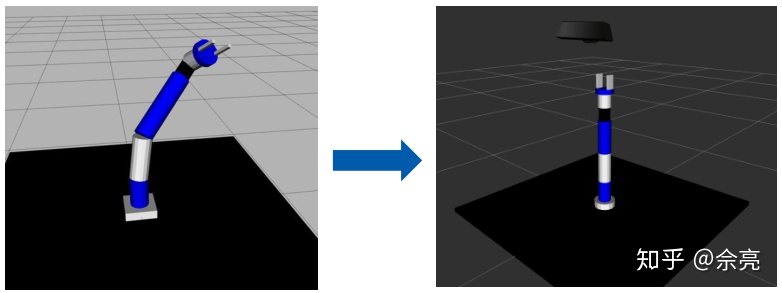

仿真环境
roslaunch marm_gazebo arm_world.launch 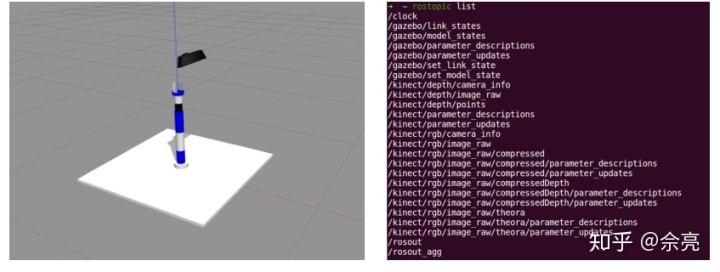
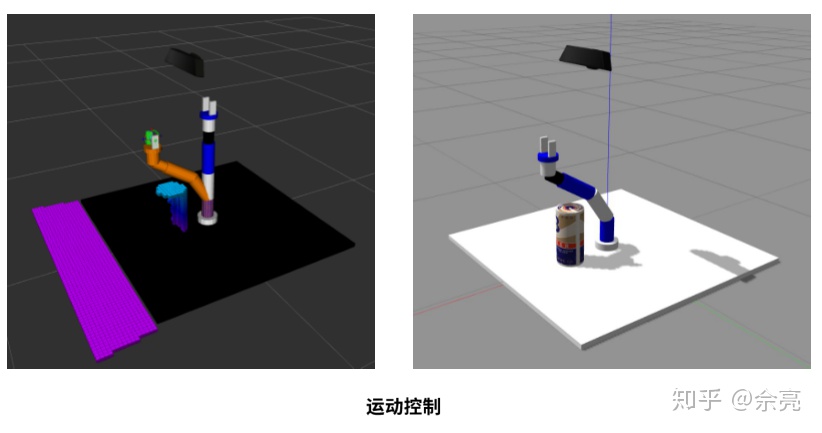
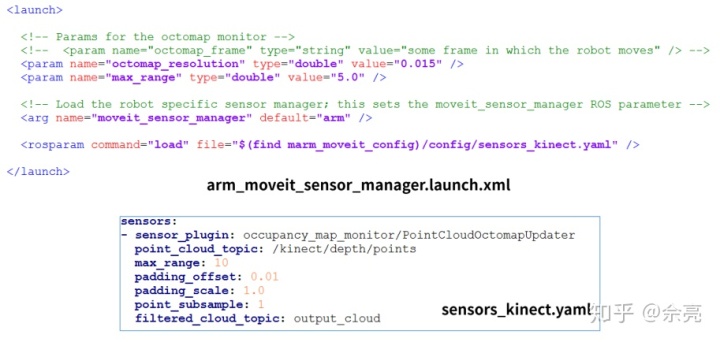
MoveIt!视觉集成
roslaunch marm_gazebo arm_bringup_moveit.launch 

mbot+marm
模型显示
roslaunch marm_desription view_mbot_with_arm.launch
roslaunch marm_desription view_mbot_with_arm_kinect.launch 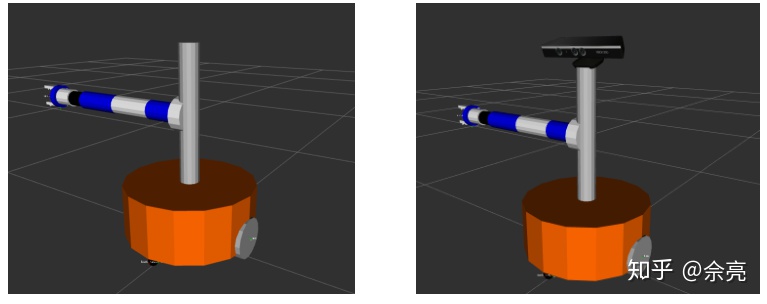
MoveIt!控制
roslaunch mbot_with_arm_moveit_config demo.launch 
gazebo仿真环境
roslaunch marm_gazebo mbot_with_arm_world.launch 
MoveIt!+gazebo控制
roslaunch marm_gazebo mbot_with_arm_bringup_moveit.launch 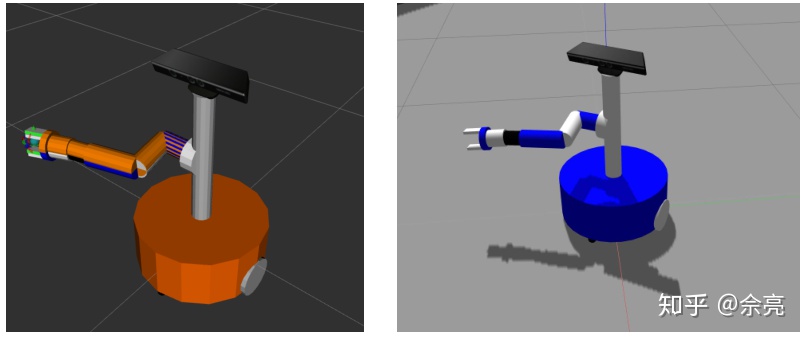














 4726
4726











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









